一种家居用扫地机器人清扫机构的制作方法
1.本发明涉及家用清洁卫生电器领域,尤其是涉及一种家居用扫地机器人清扫机构。
背景技术:
2.随着人们生活水平逐步提高,智能家用电器得到广泛使用,扫地机器人是一种较为常见的家用清洁卫生电器,扫地机器人一般以圆盘状居多,设置有感应器,可侦测障碍物,采用刷扫的方式,将地面上的垃圾杂物吸入自身的垃圾收纳处,完成其使用功能。
3.相关技术可参考公告号为cn204600368u的中国专利公开了一种家用清扫机器人,包括底座、两个移动机构、吸尘机构、两个边刷机构、滚刷机构和随动轮,移动机构、吸尘机构、边刷机构、滚刷机构和随动轮都安装在底座上。移动机构包括驱动电机和减速机构,减速机构包括箱体、箱体盖、带齿组合轮、高速传动轴、中间组合齿轮、中间传动轴、大齿轮、低速传动轴、轮子,带齿组合轮安装在高速传动轴上,中间组合齿轮安装在中间传动轴上,大齿轮和轮子安装在低速传动轴上,驱动电机与高速传动轴相连,带齿组合轮与中间组合齿轮啮合,中间组合齿轮还与大齿轮啮合。
4.针对上述中的相关技术,发明人认为,上述家用清扫机器人在使用时,两个边刷机构反向转动,将地面的垃圾向两个边刷机构之间扫动,两个边刷机构之间的距离不可调节,位于两个边刷机构正中间的部分垃圾可能无法被清扫到,这部分垃圾无法进入滚刷机构,进而对垃圾的清理效果不佳。
技术实现要素:
5.为了提高对垃圾的清理效果,本技术提供一种家居用扫地机器人清扫机构。
6.本技术提供一种家居用扫地机器人清扫机构,采用如下的技术方案:一种家居用扫地机器人清扫机构,包括机体,所述机体包括抽风机、收集组件、传感器、两组清扫组件和两个万向轮,清扫组件包括定位块、第一电机和聚尘刷,第一电机与定位块固定连接,聚尘刷与第一电机输出轴相连,机体固设有第二电机,第二电机输出轴固定连接有螺纹杆,螺纹杆背离第二电机的一端与机体转动连接,螺纹杆两端的螺纹方向相反,两个定位块分别与螺纹杆的两端螺纹连接,机体开设有与定位块相适配的限位槽。
7.通过采用上述技术方案,第一电机带动聚尘刷反向转动,将垃圾向两个聚尘刷之间拨动清扫;当部分垃圾位于两个聚尘刷正中间无法被聚尘刷清扫到时,第二电机带动螺纹杆转动,使螺纹杆带动两个定位块相向移动,使得两个定位块相互靠近,两个聚尘刷之间的距离减少,再由两个聚尘刷反向转动进行清扫,将位于两个聚尘刷正中间位置的垃圾清扫到收集组件内,对垃圾的清理效果较好。
8.可选的,所述机体靠近抽风机处设有若干排风孔,机体靠近排风孔处固设有导气管,机体靠近传感器处固设有倾斜设置的吹风头,吹风头与螺纹杆中间正下方相对应,导气管背离排风孔的一端与吹风头相连通。
9.通过采用上述技术方案,抽风机对一侧抽风,向另一侧排风,抽风机排出的风流经导气管再从吹风头吹出,吹出的风将位于两个聚尘刷中间的垃圾向收集组件处吹动,有利于加快对垃圾的收集清理,提高对垃圾的清扫效果。
10.可选的,所述收集组件包括滚刷和收集盒,机体内开设有放置腔和拾取腔,抽风机位于放置腔内,滚刷位于拾取腔内,拾取腔开设有进料口和排料口,进料口与聚尘刷相适配,排料口与收集盒相连通,收集盒背离排料口的一端与放置腔相连通,收集盒与放置腔连接处设有过滤板,机体下端部设有清洁布。
11.通过采用上述技术方案,抽风机对拾取腔和收集盒进行抽风,经过聚尘刷清扫的垃圾向拾取腔内移动,与滚刷接触后由滚刷转动带动垃圾转动,在抽风机的吸力气流作用下,垃圾从拾取腔进入收集盒内;垃圾再经过过滤板阻挡落在收集盒内,气流向放置腔内流动并从排风孔排出;垃圾被吸入拾取腔内时,机体继续向前移动,清洁布对与垃圾接触的地面进行擦拭,有利于提高对地面的清扫效果。
12.可选的,所述机体内固设有驱动滚刷转动的第三电机,过滤板上固设有过滤层,第三电机输出轴固定连接有第一齿轮,收集盒靠近过滤层处转动连接有转轴,转轴的一端穿过收集盒固定连接有第一齿轮相啮合的第二齿轮,转轴沿轴向固定连接有若干与过滤层相抵触的橡胶拨片。
13.通过采用上述技术方案,过滤层便于对垃圾中掺杂的粒径较小的杂质进行过滤,有利于进一步提高对气流中垃圾的过滤效果。第三电机带动滚刷转动的同时,转轴转动带动所有的橡胶拨片转动,橡胶拨片对过滤层进行拨动震击,便于将粒径较小的杂质震下,有利于防止杂质堵塞过滤层。
14.可选的,所述清洁布靠近机体的端面固设有若干子扣,机体下端面固设有若干与子扣相适配的母扣。
15.通过采用上述技术方案,清洁布上的子扣与机体上相对应的母扣扣合,使得清洁布与机体可进行拆卸,方便将清洁布拆下重复使用。
16.可选的,所述限位槽中部固设有隔板,隔板与螺纹杆中部转动连接。
17.通过采用上述技术方案,隔板便于对两个定位块的移动进行限定,防止两个定位块相向移动时发生碰触。
18.可选的,所述导气管侧壁固定连接有加热管。
19.通过采用上述技术方案,加热管便于对流经导气管的气流进行加热,进而便于对潮湿的垃圾进行一定的干燥处理,便于保障聚尘刷对垃圾进行清扫较为方便。
20.可选的,所述机体沿周向固设有聚氨酯防撞板。
21.通过采用上述技术方案,聚氨酯防撞板起到缓冲减震和防护的作用,有利于减小对机体的损伤,延长机体的使用寿命。
22.综上所述,本技术包括以下至少一种有益技术效果:1.第一电机带动聚尘刷反向转动,将垃圾向两个聚尘刷之间拨动清扫;当部分垃圾位于两个聚尘刷正中间无法被聚尘刷清扫到时,第二电机带动螺纹杆转动,使螺纹杆带动两个定位块相向移动,使得两个定位块相互靠近,两个聚尘刷之间的距离减少,再由两个聚尘刷反向转动进行清扫,将位于两个聚尘刷正中间位置的垃圾清扫到收集组件内,对垃圾的清理效果较好;
2.抽风机对一侧抽风,向另一侧排风,抽风机排出的风流经导气管再从吹风头吹出,吹出的风将位于两个聚尘刷中间的垃圾向收集组件处吹动,有利于加快对垃圾的收集清理,提高对垃圾的清扫效果;3.过滤层便于对垃圾中掺杂的粒径较小的杂质进行过滤,有利于进一步提高对气流中垃圾的过滤效果。第三电机带动滚刷转动的同时,转轴转动带动所有的橡胶拨片转动,橡胶拨片对过滤层进行拨动震击,便于将粒径较小的杂质震下,有利于防止杂质堵塞过滤层。
附图说明
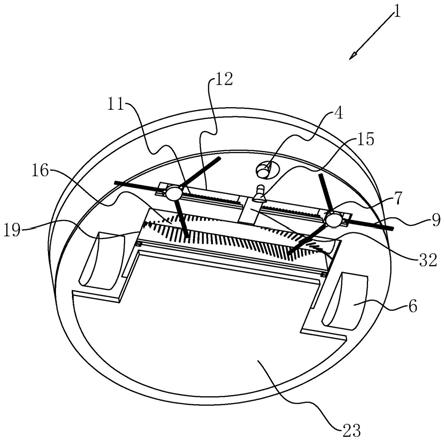
23.图1是本技术实施例一种家居用扫地机器人清扫机构的仰视图。
24.图2是机体的剖面示意图。
25.图3旨在突显清扫组件与螺纹杆的结构示意图。
26.图4旨在突显滚刷与转轴的结构示意图。
27.图5旨在突显聚氨酯防撞板的位置示意图。
28.附图标记说明:1、机体;2、抽风机;3、收集组件;4、传感器;5、清扫组件;6、万向轮;7、定位块;8、第一电机;9、聚尘刷;10、第二电机;11、螺纹杆;12、限位槽;13、排风孔;14、导气管;15、吹风头;16、滚刷;17、收集盒;18、放置腔;19、拾取腔;20、进料口;21、排料口;22、过滤板;23、清洁布;24、第三电机;25、过滤层;26、第一齿轮;27、转轴;28、第二齿轮;29、橡胶拨片;32、隔板;34、聚氨酯防撞板。
具体实施方式
29.以下结合全部附图对本技术作进一步详细说明。
30.本技术实施例公开一种家居用扫地机器人清扫机构。
实施例
31.参照图1和图2,一种家居用扫地机器人清扫机构,包括机体1,机体1包括抽风机2、收集组件3、传感器4和两个万向轮6,家居用扫地机器人清扫机构在使用时,由万向轮6控制机体1进行移动,机体1上的传感器4对周边地面环境进行扫描侦测,保障机体1在移动时不会碰撞到障碍物等。
32.参照图1和图3,机体1还包括两组清扫组件5,清扫组件5包括定位块7、第一电机8和聚尘刷9,第一电机8与定位块7固定连接,聚尘刷9与第一电机8输出轴相连,对垃圾进行清理时,启动清扫组件5上的第一电机8,第一电机8输出轴带动聚尘刷9转动,两个聚尘刷9反向转动,将地面上靠近传感器4一端的垃圾向两个聚尘刷9之间拨动清扫。
33.参照图1和图2,机体1内开设有放置腔18和拾取腔19,抽风机2位于放置腔18内,抽风机2位于机体1背离传感器4的一端,收集组件3包括滚刷16和收集盒17,滚刷16位于拾取腔19内,拾取腔19开设有进料口20和排料口21,进料口20与聚尘刷9相适配,排料口21与收集盒17相连通,收集盒17背离排料口21的一端与放置腔18相连通。在使用时,操作人员启动放置腔18内的抽风机2,抽风机2提供吸力气流,抽风机2对拾取腔19和收集盒17进行抽风,在抽风机2的吸力气流下,经过两个聚尘刷9清扫的垃圾向拾取腔19内移动,垃圾从进料口
20处进入拾取腔19。
34.参照图2和图4,机体1内固定安装有驱动滚刷16转动的第三电机24,第三电机24带动滚刷16转动,垃圾与滚刷16接触后,滚刷16转动带动垃圾随之转动,在抽风机2的吸力气流作用下,垃圾从滚刷16上落下并且流经排料口21进入收集盒17内;在抽风机2的吸力气流下,位于收集盒17内的垃圾再向放置腔18内移动。收集盒17与放置腔18连接处设有过滤板22,过滤板22开设有多个滤孔,垃圾经过过滤板22阻挡落在收集盒17内。机体1靠近抽风机2处设有多个排风孔13,抽风机2的气流再向放置腔18内流动并从排风孔13排出。
35.参照图2,过滤板22上固定有过滤层25,过滤层25便于对垃圾中掺杂的粒径较小的杂质进行过滤,如飞尘、尘土等。可提高对气流中垃圾的过滤效果,减少进入放置腔18内的杂质含量,提高放置腔18的整洁性,保障抽风机2的使用效果。
36.参照图2和图4,第三电机24输出轴固定连接有第一齿轮26,第三电机24带动滚刷16转动的同时带动第一齿轮26转动,收集盒17靠近过滤层25处转动连接有转轴27,转轴27的两端均与收集盒17转动连接,转轴27的一端穿过收集盒17固定连接有第二齿轮28,第一齿轮26与第二齿轮28相啮合,进而使得第二齿轮28带动转轴27转动。
37.参照图2和图4,转轴27沿轴向固定连接有多个与过滤层25相抵触的橡胶拨片29,转轴27转动带动所有的橡胶拨片29转动,橡胶拨片29与过滤层25抵触,对过滤层25进行拨动震击,将粘附于过滤层25上粒径较小的杂质震下,防止杂质堵塞过滤层25,保障气流正常流通,进而保障对垃圾的正常清理。
38.参照图2和图3,机体1固设有第二电机10,第二电机10输出轴固定连接有螺纹杆11,螺纹杆11背离第二电机10的一端与机体1转动连接,当存在部分垃圾位于两个聚尘刷9正中间位置,无法被聚尘刷9清扫到时,启动第二电机10,第二电机10输出轴转动带动螺纹杆11转动,螺纹杆11两端的螺纹方向相反,两个定位块7分别与螺纹杆11的两端螺纹连接,机体1开设有与定位块7相适配的限位槽12,限位槽12对两个定位块7进行限位,使得螺纹杆11可带动两个定位块7相向或反向移动。
39.参照图1,限位槽12中部固定有隔板32,隔板32与螺纹杆11中部转动连接。隔板32对两个定位块7的移动进行限定,防止两个定位块7相向移动时发生碰触,同时隔板32对螺纹杆11上两个反向螺纹进行阻隔。
40.参照图2和图3,当螺纹杆11正转时,使得两个定位块7相互靠近,进而两个聚尘刷9之间的距离减少,再由两个聚尘刷9反向转动进行清扫,进而位于两个聚尘刷9正中间位置的垃圾被清扫到拾取腔19内,对垃圾的清理效果较好。当两个聚尘刷9正中间位置没有垃圾时,第二电机10输出轴转动带动螺纹杆11反转,使得两个定位块7相互远离,使两个聚尘刷9复位到正常位置。
41.参照图1和图2,抽风机2对一侧抽风,向另一侧排风,机体1靠近排风孔13处固定有导气管14,导气管14位于机体1内,机体1靠近传感器4处固定有倾斜的吹风头15,导气管14背离排风孔13的一端与吹风头15相连通,抽风机2排出的风流经导气管14再从吹风头15吹出,吹风头15位于传感器4与螺纹杆11之间,吹风头15与螺纹杆11中间正下方相对应,进而吹风头15吹出的风将位于两个聚尘刷9中间的垃圾向拾取腔19处吹动。
42.参照图1和图2,同时导气管14侧壁固定连接有加热管。加热管对流经导气管14的气流进行加热,对潮湿的垃圾进行一定的干燥处理,使得聚尘刷9对垃圾进行清扫较为方
便。吹风头15辅助聚尘刷9对垃圾进行拨动清扫,便于加快对垃圾的收集清理,提高对垃圾的清扫效果。
43.参照图1和图2,机体1下端部可拆卸连接有清洁布23,清洁布23位于机体1背离传感器4的一端。垃圾被吸入拾取腔19内时,机体1继续向前移动,清洁布23再对与垃圾接触的地面进行擦拭,提高对地面的清扫效果。机体1下端面铰接有与收集盒17相适配的盖板,通过打开盖板可对收集盒17内的垃圾进行清除。清洁布23靠近机体1的端面固定有多个子扣,机体1下端面固定有多个与子扣相适配的母扣。清洁布23上的子扣与机体1上相对应的母扣扣合,使得清洁布23与机体1可进行拆卸,操作人员可定期将清洁布23取下进行清洗,方便对清洁布23重复使用,节约资源。
44.参照图1和图5,操作人员在行走时可能会碰到机体1,机体1沿周向固定有一圈聚氨酯防撞板34,聚氨酯防撞板34起到缓冲减震和防护的作用,对机体1进行防护,可减小对机体1的损伤,延长机体1的使用寿命。
45.本技术实施例一种家居用扫地机器人清扫机构的实施原理为:家居用扫地机器人清扫机构在使用时,由万向轮6控制机体1进行移动,机体1上的传感器4对周边地面环境进行扫描侦测,第一电机8输出轴带动聚尘刷9转动,两个聚尘刷9反向转动,将地面上靠近传感器4一端的垃圾向两个聚尘刷9之间拨动清扫;同时在抽风机2的作用下,垃圾向拾取腔19处移动,经滚刷16输送到收集盒17内;清洁布23再对与垃圾接触的地面进行擦拭;当存在部分垃圾位于两个聚尘刷9正中间位置,无法被聚尘刷9清扫到时,由第二电机10转动带动螺纹杆11转动,使得两个定位块7相互靠近,进而两个聚尘刷9之间的距离减少,再由两个聚尘刷9反向转动进行清扫,进而位于两个聚尘刷9正中间位置的垃圾被清扫到拾取腔19处,再经滚刷16输送到收集盒17内。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1