基于断点记录的清洁规划方法及装置与流程
本发明涉及物联网,尤其涉及一种基于断点记录的清洁规划方法及装置。
背景技术:
1、随着清洁设备研发技术和智能算法技术的发展,家居的清洁设备的智能化程度也越来越高,越来越多的家庭选择智能清洁设备如扫地机器人作为家用清洁设备。现有的清洁设备在清洁中遇到阻碍时可能会中断清洁,但重新进行清洁规划时极少考虑到中断时的清洁情形,因此无法全面和合理地重新确定清洁策略,可见现有技术存在缺陷,亟待解决。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种基于断点记录的清洁规划方法及装置,可以实现更加合理和智能地确定清洁策略,综合考虑到先前未完成的工作,以提高清洁设备的清洁效率。
2、为了解决上述技术问题,本发明第一方面公开了一种基于断点记录的清洁规划方法,所述方法包括:
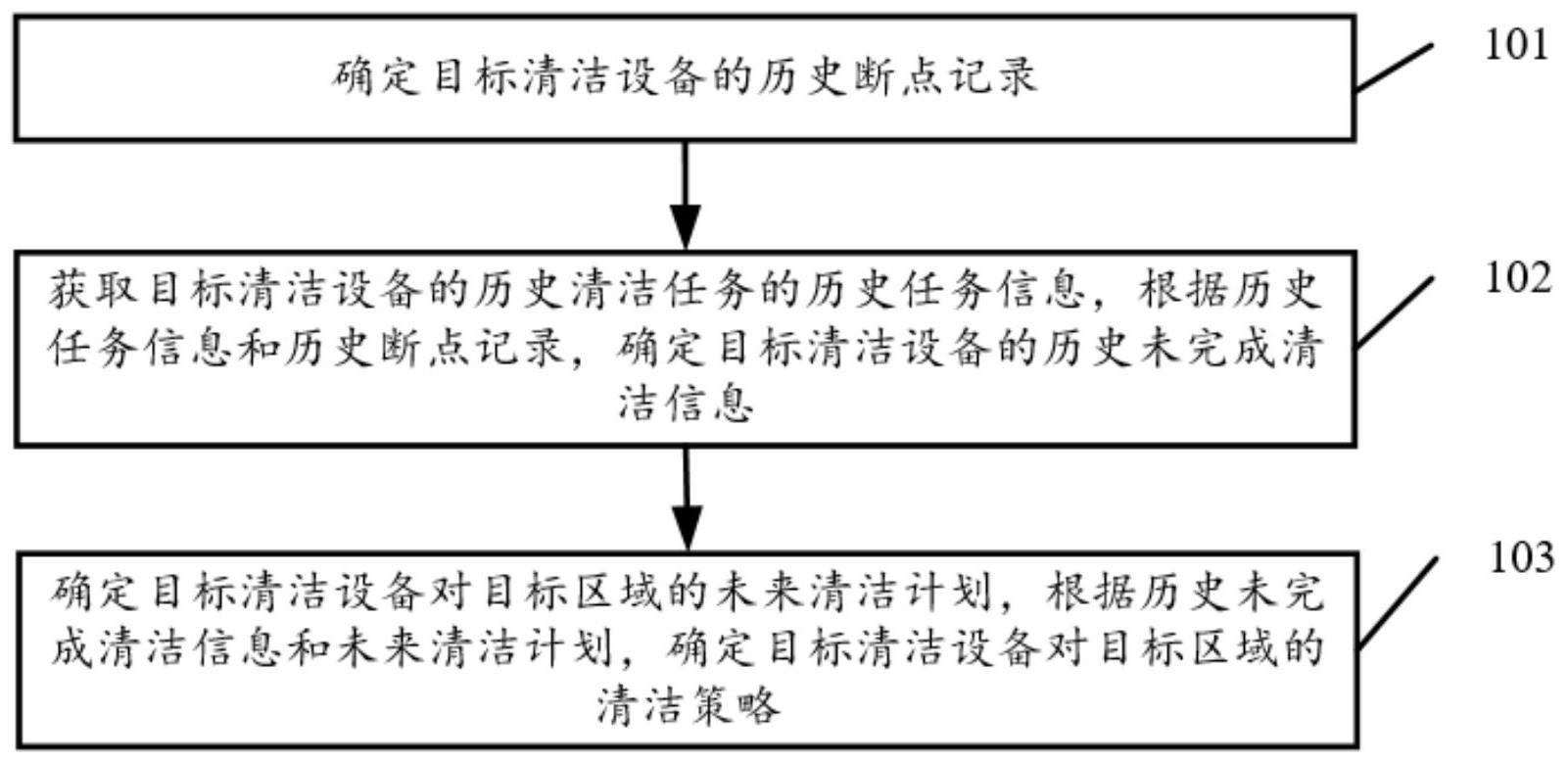
3、确定目标清洁设备的历史断点记录;所述历史断点记录用于指示所述目标清洁设备在历史时间段中在目标区域的中断至少一次历史清洁任务时的断点记录;
4、获取所述目标清洁设备的所述历史清洁任务的历史任务信息,根据所述历史任务信息和所述历史断点记录,确定所述目标清洁设备的历史未完成清洁信息;
5、确定所述目标清洁设备对所述目标区域的未来清洁计划,根据所述历史未完成清洁信息和未来清洁计划,确定所述目标清洁设备对所述目标区域的清洁策略;所述清洁策略用于控制所述目标清洁设备对所述目标区域进行清洁。
6、作为一种可选的实施方式,在本发明第一方面中,所述断点记录的断点信息包括断点位置、断点时间、断点次数和断点时任务进度中的至少一种。
7、作为一种可选的实施方式,在本发明第一方面中,所述确定目标清洁设备的历史断点记录,包括:
8、获取所述目标清洁设备在多个历史时间段中在目标区域的中断多次历史清洁任务时的多个断点记录;
9、对于任意一个所述断点记录,根据所述断点信息,判断该断点记录是否为不重要断点或设备故障断点;
10、当判断到该断点记录为不重要断点或设备故障断点时,将该断点记录从所述历史断点记录中删除。
11、作为一种可选的实施方式,在本发明第一方面中,所述根据所述断点信息,判断该断点记录是否为不重要断点或设备故障断点,包括:
12、判断该断点记录的所述断点位置是否位于预设的边缘位置区域;
13、若是,则判断该断点记录为不重要断点;
14、和/或,
15、判断该断点记录的所述断点位置与所述目标区域的活动中心位置之间的距离是否大于预设的第一距离阈值;所述活动中心位置根据所述目标区域的多个人类活动轨迹计算得到;
16、若是,则判断该断点记录为不重要断点;
17、和/或,
18、判断该断点记录的所述断点时间与对应的所述历史清洁任务的结束时间之间的时间差是否大于预设的第一时间阈值;
19、若是,则判断该断点记录为不重要断点;
20、和/或,
21、计算所有所述断点记录的所述断点次数的次数平均值;
22、判断该断点记录的所述断点次数与所述次数平均值之间的次数差值是否大于预设的次数差值阈值;
23、若是,则判断该断点记录为设备故障断点;
24、和/或,
25、判断该断点记录的所述断点时任务进度是否大于预设的进度阈值;
26、若是,则判断该断点记录为不重要断点。
27、作为一种可选的实施方式,在本发明第一方面中,所述历史任务信息包括任务清洁对象和/或任务清洁路线;和/或,所述历史未完成清洁信息包括待完成清洁对象和/或未完成清洁区域。
28、作为一种可选的实施方式,在本发明第一方面中,所述根据所述历史任务信息和所述历史断点记录,确定所述目标清洁设备的历史未完成清洁信息,包括:
29、对于任意一个所述历史清洁任务,根据该历史清洁任务的任务清洁路线和所述断点记录的断点位置,确定出该历史清洁任务对应的未完成路线;
30、确定所述未完成路线在所述目标区域的起点和终点;
31、过所述起点做两条第一线;所述两条第一线以所述起点为顶点形成的朝向所述终点的角的大小,与所述目标清洁设备的清洁面积成正比;
32、过所述终点做两条第二线;所述两条第二线以所述终点为顶点形成的朝向所述起点的角的大小,与所述目标清洁设备的清洁面积成正比;
33、将所述目标区域内,被所述两条第一线和两条第二线包围的区域,确定为所述目标清洁设备的未完成清洁区域;
34、和/或,
35、对于任意一个所述历史清洁任务,判断该历史清洁任务的所述断点记录的断点时任务进度是否小于100%,若是,将该历史清洁任务的任务清洁对象确定为所述目标清洁设备的待完成清洁对象。
36、作为一种可选的实施方式,在本发明第一方面中,所述未来清洁计划包括多个未来清洁任务的未来任务信息;所述未来任务信息包括未来清洁区域和/或未来清洁对象。
37、作为一种可选的实施方式,在本发明第一方面中,所述根据所述历史未完成清洁信息和未来清洁计划,确定所述目标清洁设备对所述目标区域的清洁策略,包括:
38、对于任一所述未来清洁任务,根据所述未来任务信息和所述历史未完成清洁信息,计算该未来清洁任务的任务适配度;
39、根据所述任务适配度从大到小,对所有所述未来清洁任务进行排序,得到任务序列;
40、确定所述目标清洁设备对所述目标区域的清洁策略为根据所述任务序列从头到尾依次执行所有所述未来清洁任务;
41、以及,所述根据所述未来任务信息和所述历史未完成清洁信息,计算该未来清洁任务的任务适配度,包括:
42、计算所述未来清洁区域和所述未完成清洁区域的第一相似度,以确定该未来清洁任务的任务适配度;
43、和/或,
44、计算所述未来清洁对象和所述待完成清洁对象的第二相似度,以确定该未来清洁任务的任务适配度;
45、和/或,
46、计算所述第一相似度和第二相似度的加权求和值,以确定该未来清洁任务的任务适配度。
47、本发明第二方面公开了一种基于断点记录的清洁规划装置,所述装置包括:
48、第一确定模块,用于确定目标清洁设备的历史断点记录;所述历史断点记录用于指示所述目标清洁设备在历史时间段中在目标区域的中断至少一次历史清洁任务时的断点记录;
49、第二确定模块,用于获取所述目标清洁设备的所述历史清洁任务的历史任务信息,根据所述历史任务信息和所述历史断点记录,确定所述目标清洁设备的历史未完成清洁信息;
50、第三确定模块,用于确定所述目标清洁设备对所述目标区域的未来清洁计划,根据所述历史未完成清洁信息和未来清洁计划,确定所述目标清洁设备对所述目标区域的清洁策略;所述清洁策略用于控制所述目标清洁设备对所述目标区域进行清洁。
51、作为一种可选的实施方式,在本发明第二方面中,所述断点记录的断点信息包括断点位置、断点时间、断点次数和断点时任务进度中的至少一种。
52、作为一种可选的实施方式,在本发明第二方面中,所述第一确定模块包括:
53、获取单元,用于获取所述目标清洁设备在多个历史时间段中在目标区域的中断多次历史清洁任务时的多个断点记录;
54、判断单元,用于对于任意一个所述断点记录,根据所述断点信息,判断该断点记录是否为不重要断点或设备故障断点;
55、删除单元,用于当所述判断单元判断到该断点记录为不重要断点或设备故障断点时,将该断点记录从所述历史断点记录中删除。
56、作为一种可选的实施方式,在本发明第二方面中,所述判断单元根据所述断点信息,判断该断点记录是否为不重要断点或设备故障断点的具体方式,包括:
57、判断该断点记录的所述断点位置是否位于预设的边缘位置区域;
58、若是,则判断该断点记录为不重要断点;
59、和/或,
60、判断该断点记录的所述断点位置与所述目标区域的活动中心位置之间的距离是否大于预设的第一距离阈值;所述活动中心位置根据所述目标区域的多个人类活动轨迹计算得到;
61、若是,则判断该断点记录为不重要断点;
62、和/或,
63、判断该断点记录的所述断点时间与对应的所述历史清洁任务的结束时间之间的时间差是否大于预设的第一时间阈值;
64、若是,则判断该断点记录为不重要断点;
65、和/或,
66、计算所有所述断点记录的所述断点次数的次数平均值;
67、判断该断点记录的所述断点次数与所述次数平均值之间的次数差值是否大于预设的次数差值阈值;
68、若是,则判断该断点记录为设备故障断点;
69、和/或,
70、判断该断点记录的所述断点时任务进度是否大于预设的进度阈值;
71、若是,则判断该断点记录为不重要断点。
72、作为一种可选的实施方式,在本发明第二方面中,所述历史任务信息包括任务清洁对象和/或任务清洁路线;和/或,所述历史未完成清洁信息包括待完成清洁对象和/或未完成清洁区域。
73、作为一种可选的实施方式,在本发明第二方面中,所述第二确定模块根据所述历史任务信息和所述历史断点记录,确定所述目标清洁设备的历史未完成清洁信息的具体方式,包括:
74、对于任意一个所述历史清洁任务,根据该历史清洁任务的任务清洁路线和所述断点记录的断点位置,确定出该历史清洁任务对应的未完成路线;
75、确定所述未完成路线在所述目标区域的起点和终点;
76、过所述起点做两条第一线;所述两条第一线以所述起点为顶点形成的朝向所述终点的角的大小,与所述目标清洁设备的清洁面积成正比;
77、过所述终点做两条第二线;所述两条第二线以所述终点为顶点形成的朝向所述起点的角的大小,与所述目标清洁设备的清洁面积成正比;
78、将所述目标区域内,被所述两条第一线和两条第二线包围的区域,确定为所述目标清洁设备的未完成清洁区域;
79、和/或,
80、对于任意一个所述历史清洁任务,判断该历史清洁任务的所述断点记录的断点时任务进度是否小于100%,若是,将该历史清洁任务的任务清洁对象确定为所述目标清洁设备的待完成清洁对象。
81、作为一种可选的实施方式,在本发明第二方面中,所述未来清洁计划包括多个未来清洁任务的未来任务信息;所述未来任务信息包括未来清洁区域和/或未来清洁对象。
82、作为一种可选的实施方式,在本发明第二方面中,所述第三确定模块根据所述历史未完成清洁信息和未来清洁计划,确定所述目标清洁设备对所述目标区域的清洁策略的具体方式,包括:
83、对于任一所述未来清洁任务,根据所述未来任务信息和所述历史未完成清洁信息,计算该未来清洁任务的任务适配度;
84、根据所述任务适配度从大到小,对所有所述未来清洁任务进行排序,得到任务序列;
85、确定所述目标清洁设备对所述目标区域的清洁策略为根据所述任务序列从头到尾依次执行所有所述未来清洁任务;
86、以及,所述第三确定模块根据所述未来任务信息和所述历史未完成清洁信息,计算该未来清洁任务的任务适配度的具体方式,包括:
87、计算所述未来清洁区域和所述未完成清洁区域的第一相似度,以确定该未来清洁任务的任务适配度;
88、和/或,
89、计算所述未来清洁对象和所述待完成清洁对象的第二相似度,以确定该未来清洁任务的任务适配度;
90、和/或,
91、计算所述第一相似度和第二相似度的加权求和值,以确定该未来清洁任务的任务适配度。
92、本发明第三方面公开了另一种基于断点记录的清洁规划装置,所述装置包括:
93、存储有可执行程序代码的存储器;
94、与所述存储器耦合的处理器;
95、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明实施例第一方面公开的基于断点记录的清洁规划方法中的部分或全部步骤。
96、与现有技术相比,本发明实施例具有以下有益效果:
97、本发明实施例中,确定目标清洁设备的历史断点记录;获取所述目标清洁设备的所述历史清洁任务的历史任务信息,根据所述历史任务信息和所述历史断点记录,确定所述目标清洁设备的历史未完成清洁信息;确定所述目标清洁设备对所述目标区域的未来清洁计划,根据所述历史未完成清洁信息和未来清洁计划,确定所述目标清洁设备对所述目标区域的清洁策略。可见,本发明可以利用清洁设备的历史断点记录和历史任务信息,确定出其未完成的任务信息,再根据其未来的清洁计划结合该未完成的任务信息确定出清洁策略,从而可以实现更加合理和智能地确定清洁策略,综合考虑到先前未完成的工作,以提高清洁设备的清洁效率。
- 还没有人留言评论。精彩留言会获得点赞!