一种智能清洁无人洗地机器人的制作方法
1.本实用新型涉及智能技术领域,尤其涉及一种智能清洁无人洗地机器人。
背景技术:
2.随着社会生产力的发展,机械化和自动化逐渐替代人类繁重的手工劳动,劳动力成本增加,清洁行业老龄化问题,洗地机出现能够大量节省时间,节省劳动量,机器人在各行各业中都得到了广泛的应用和发展,其次丰富的功能,简洁的操作和高效的工作为人们的生活和研究来了较大的便利和影响。
3.在清洁卫生方面,机器人的应用也十分广泛,许多机器人开始在清洁、吸尘、扫地、擦窗、洗地等方面得到应用,目前在洗地机器人方面,已知的洗地机器人产品为体积比较大的人工操控机器人,智能化程度不高,而且由于其体积的限制,使用十分不方便,比如无法进入一些低矮,狭小的空间进行清洁工作,而一些洗地机器人在污水回收功能上还十分薄弱,需要人工不停加水才能持续洗地工作,消耗了人力同时又容易出现水浪费现象。
4.因此,有必要提供一种智能清洁无人洗地机器人解决上述技术问题。
技术实现要素:
5.本实用新型提供一种智能清洁无人洗地机器人,解决了一些洗地机器人在污水回收功能上还十分薄弱的问题。
6.为解决上述技术问题,本实用新型提供的智能清洁无人洗地机器人,包括:
7.机器人本体;
8.触控显示屏,所述触控显示屏设置于所述机器人本体的顶部;
9.污水循环组件,所述污水循环组件设置于所述机器人本体的内部,所述污水循环组件包括净化池,所述净化池设置于所述机器人本体的内部,并且机器人本体的内部设置有水泵,所述水泵的一侧连通有污水管,所述污水管的一端贯穿所述机器人本体并延伸至所述机器人本体的外部,所述净化池的底部连通有排水管,所述排水管的底端贯穿所述机器人本体并延伸至所述机器人本体的外部;
10.连接管,所述连接管的一端与所述水泵的一侧连通,所述连接管的另一端与所述净化池的内部连通。
11.优选的,所述机器人本体的底部设置有清扫件,所述污水管上设置有过滤袋。
12.优选的,所述机器人本体的正面设置有tof导航激光,所述机器人本体的正面且位于tof导航激光的顶部设置有超声波雷达。
13.优选的,所述机器人本体的正面且位于所述超声波雷达的顶部设置有英特尔深度相机,所述英特尔深度相机的顶部分别设置有热成像模组和高清摄像头。
14.优选的,所述机器人本体的背面设置有充电触电。
15.优选的,所述机器人本体的正面设置有离子电浆发生器。
16.优选的,所述净化池内部的两侧均固定连接有安装件,两个所述安装件的顶部之
间设置有滤芯,所述滤芯底部的两侧均固定连接有安装板,所述安装板的一侧开设有凹槽。
17.优选的,所述安装件内部的两侧之间滑动连接有移动板,所述移动板的底部设置有压缩弹簧,所述压缩弹簧的底端设置于所述安装件内部的一侧,所述安装件内部的两侧均固定连接有限位块,所述限位块的一侧接触于所述移动板上,所述安装件内部的一侧固定连接有连接板,所述连接板的底部滑动连接有卡紧件,所述卡紧件的一侧贯穿所述凹槽并延伸至所述凹槽的内部,所述卡紧件的一侧设置有挤压弹簧,所述连接板底部的一侧固定连接有固定板,所述挤压弹簧的一端设置于所述固定板的一侧。
18.与相关技术相比较,本实用新型提供的智能清洁无人洗地机器人具有如下有益效果:
19.本实用新型提供一种智能清洁无人洗地机器人,该机器人能够对产生的废水进行过滤净化,实现污水的重复利用,避免了污水排放到外界环境中,造成环境的污染,进而节约了大量的水资源,值得大规模的推广使用,进而提高了该机器人的实用性。
附图说明
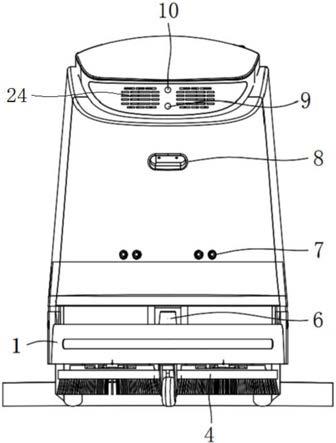
20.图1为本实用新型提供的智能清洁无人洗地机器人的第一实施例的结构示意图;
21.图2为本实用新型提供的智能清洁无人洗地机器人的背面结构示意图;
22.图3为本实用新型提供的智能清洁无人洗地机器人的俯视结构示意图;
23.图4为本实用新型提供的智能清洁无人洗地机器人的底部结构示意图;
24.图5为图1所述的机器人本体的侧视截面结构示意图;
25.图6为本实用新型提供的智能清洁无人洗地机器人的第二实施例的结构示意图;
26.图7为图6所述的安装件的剖视结构示意图。
27.图中标号:1、机器人本体,2、触控显示屏,3、污水循环组件,31、净化池,32、水泵,33、污水管,34、排水管,4、清扫件,5、过滤袋,6、tof导航激光,7、超声波雷达,8、英特尔深度相机,9、热成像模组,10、高清摄像头,11、充电触电,12、安装件,13、滤芯,14、安装板,15、凹槽,16、移动板,17、压缩弹簧,18、限位块,19、连接板,20、卡紧件,21、挤压弹簧,22、固定板,23、连接管,24、离子电浆发生器。
具体实施方式
28.下面结合附图和实施方式对本实用新型作进一步说明。
29.第一实施例
30.请结合参阅图1、图2、图3、图4和图5,其中,图1为本实用新型提供的智能清洁无人洗地机器人的第一实施例的结构示意图;图2为本实用新型提供的智能清洁无人洗地机器人的背面结构示意图;图3为本实用新型提供的智能清洁无人洗地机器人的俯视结构示意图;图4为本实用新型提供的智能清洁无人洗地机器人的底部结构示意图;图5为图1所述的机器人本体的侧视截面结构示意图。智能清洁无人洗地机器人,包括:
31.机器人本体1;
32.触控显示屏2,所述触控显示屏2设置于所述机器人本体1的顶部;
33.污水循环组件3,所述污水循环组件3设置于所述机器人本体1的内部,所述污水循环组件3包括净化池31,所述净化池31设置于所述机器人本体1的内部,并且机器人本体1的
内部设置有水泵32,所述水泵32的一侧连通有污水管33,所述污水管33的一端贯穿所述机器人本体1并延伸至所述机器人本体1的外部,所述净化池31的底部连通有排水管34,所述排水管34的底端贯穿所述机器人本体1并延伸至所述机器人本体1的外部;
34.连接管23,所述连接管23的一端与所述水泵32的一侧连通,所述连接管23的另一端与所述净化池31的内部连通;
35.触控显示屏2与外界的电源以及控制开关进行连接;
36.水泵32与与外界的电源以及控制开关进行连接,实现在清理地面时,对污水进行吸取过滤净化;
37.机器人本体1的底部设置有吸水耙,主要用于吸取污水。
38.所述机器人本体1的底部设置有清扫件4,所述污水管33上设置有过滤袋5;
39.清扫件4通过机器人本体1内部设置的驱动电机进行驱动,带动清扫件4进行旋转,从而对地面进行清扫;
40.所述机器人本体1的正面设置有tof导航激光6,所述机器人本体1的正面且位于tof导航激光6的顶部设置有超声波雷达7;
41.tof导航激光6采用现有技术,只需实现导航机器人本体1进行位移,并且对周围的障碍物进行躲避的效果;
42.超声波雷达7采用现有技术,实现通过运用超声波雷达7对障碍物进行定位的效果,避免在移动过程中碰撞到外界物体。
43.所述机器人本体1的正面且位于所述超声波雷达7的顶部设置有英特尔深度相机8,所述英特尔深度相机8的顶部分别设置有热成像模组9和高清摄像头10;
44.英特尔深度相机8采用现有技术,实现对人脸进行识别,以及拍照的功能即可;
45.热成像模组9和高清摄像头10均采用现有技术;
46.热成像是运用光电技术检测物体热辐射的红外线特定波段信号,将该信号转换成可供人类视觉分辨的图像和图形,并可以进一步算出温度值;
47.高清摄像头10对外界实物进行拍照。
48.所述机器人本体1的背面设置有充电触电11;
49.充电触电11与外界的充电设备进行电性连接,为机器人进行充电。
50.所述机器人本体1的正面设置有离子电浆发生器24;
51.离子电浆发生器24采用现有技术,只需实现抑制空气中的浮游菌即可。
52.本实用新型提供的智能清洁无人洗地机器人的工作原理如下:
53.机器人在工作时,通过设置的清扫件4,能够在机器人进行位移的过程中,对地面进行清理,并且将地面产生的污水通过吸水耙进行吸取,然后通过污水管33以及连接管23的运输,将其运输到净化池31中进行净化,然后通过连通的排水管34,将处理好的污水释放到外界环境中。
54.与相关技术相比较,本实用新型提供的智能清洁无人洗地机器人具有如下有益效果:
55.该机器人能够对产生的废水进行过滤净化,实现污水的重复利用,避免了污水排放到外界环境中,造成环境的污染,进而节约了大量的水资源,值得大规模的推广使用,进而提高了该机器人的实用性。
56.第二实施例
57.请结合参阅图6
‑
7,基于本技术的第一实施例提供的智能清洁无人洗地机器人,本技术的第二实施例提出另一种智能清洁无人洗地机器人。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
58.具体的,本技术的第二实施例提供的智能清洁无人洗地机器人的不同之处在于:所述净化池31内部的两侧均固定连接有安装件12,两个所述安装件12的顶部之间设置有滤芯13,所述滤芯13底部的两侧均固定连接有安装板14,所述安装板14的一侧开设有凹槽15;
59.通过设置的滤芯13,起到对污水进行过滤,将污水中的杂质进行除去;
60.安装板14底部的两侧均开设有弧面,便于推动卡紧件20,从而使得安装板14插入到安装件12中;
61.凹槽15的两侧均开设有弧面,便于卡紧件20滑动进入到凹槽15中,从而实现卡紧件20与凹槽15之间的固定卡接;
62.卡紧件20与凹槽15相适配;
63.安装件12的顶部固定连接有定位套筒,对安装板14插入到安装件12中起到定位的作用,避免安装板14插入到安装件12中,出现安装板14的偏移,进而影响卡紧件20与凹槽15的卡接。
64.所述安装件12内部的两侧之间滑动连接有移动板16,所述移动板16的底部设置有压缩弹簧17,所述压缩弹簧17的底端设置于所述安装件12内部的一侧,所述安装件12内部的两侧均固定连接有限位块18,所述限位块18的一侧接触于所述移动板16上,所述安装件12内部的一侧固定连接有连接板19,所述连接板19的底部滑动连接有卡紧件20,所述卡紧件20的一侧贯穿所述凹槽15并延伸至所述凹槽15的内部,所述卡紧件20的一侧设置有挤压弹簧21,所述连接板19底部的一侧固定连接有固定板22,所述挤压弹簧21的一端设置于所述固定板22的一侧;
65.通过设置的限位块18,起到对移动板16的位置进行限制,当移动板16滑动接触于限位块18时,卡紧件20与凹槽15正好在同一水平线上,便于两者之间进行固定卡接;
66.通过设置的挤压弹簧21,通过回弹,实现对卡紧件20与凹槽15之间进行固定卡接;
67.压缩弹簧17的回弹不会影响卡紧件20与凹槽15之间卡接的牢固性;
68.设置的压缩弹簧17,通过回弹,推动移动板16上的凹槽15与卡紧件20进行挤压,避免卡接时出现晃动,影响卡接的牢固性。
69.当长时间使用滤芯后,需要将其进行拆卸清理,避免影响对污水的过滤速率,在进行拆卸时,通过向上拉动滤芯13,使得安装板14上的凹槽15对卡紧件20进行挤压,推动卡紧件20上的挤压弹簧21进行压缩,并且继续拉动安装板14,收使得凹槽15与卡紧件20之间进行分离出来,然后卡紧件20在安装板14上进行滑动,进而实现对滤芯13的拆卸;
70.在进行安装时,通过将安装板14插入到安装件12中,使得安装板14挤压卡紧件20,推动卡紧件20在连接板19上进行滑动,并且对挤压弹簧21进行挤压,同时安装板14继续在安装件12中向下插入,进而与移动板16进行接触挤压,使得压缩弹簧17受到挤压从而变形,当移动板16与限位块18进行接触时,此时凹槽15与卡紧件20恰好在同一水平线上,从而使得卡紧件20滑动进入到凹槽15中,使得卡紧件20与凹槽15之间进行卡接固定,完成对滤芯13的安装。
71.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1