多功能机器人
1.本实用新型涉及家用机器人技术领域,尤其是一种多功能机器人。
背景技术:
2.随着机械技术与电子技术的高速发展,以及人们生活水平的提高,智能灯、清洁机器人、机器狗、快递分拣机器人、无人机等高科技智能家居产品层出不穷,渐渐走进千家万户;清洁机器人的结构可从中国专利申请号:202010933740.6的实用新型涉及的一种清洁机器人获得了解;传统的清洁机器人存在功能单一仅能用于清洁工作的不足,因此,设计一种除用于清洁工作外,还具有多种用途的多功能机器人,成为亟待解决的问题。
技术实现要素:
3.本实用新型的目的是为了克服目前的清洁机器人存在功能单一仅能用于清洁工作的不足,提供一种除用于清洁工作外,还具有多种用途的多功能机器人。
4.本实用新型的具体技术方案是:
5.一种多功能机器人,包括:控制器,小车,装于小车上的升降清扫装置、位于升降清扫装置前侧的升降擦地装置、设有位于升降擦地装置前侧的多个喷头的喷洒装置,装于小车上端的拿物装置、装于小车前端的巡航避障装置,以及设置于小车上的环境监测装置。
6.作为优选,所述的小车包括:安装台板,下端设有两个支承竖板且与安装台板下端连接的后轮架,两个设有轮毂电机且一一对应装于两个支承竖板上的电动轮,下端设有横板且与安装台板下端连接的前轮架,两个横向并列设置的减震前轮组件;减震前轮组件包括:滚轮,两个上端设有挡圈的导向柱,压簧,两个一一对应装于横板下端和滚轮上端的定位柱,两个设于横板上的导向孔;两个导向柱的下端一一对应穿过两个导向孔且分别与滚轮上端连接;压簧的两端一一对应套在两个定位柱外且一一对应压住横板下端和滚轮上端;轮毂电机与控制器电性连接。
7.作为优选,所述的升降清扫装置包括:装于安装台板下端的两个设有竖向导孔且横向并列设置的导向板、位于两个导向板之间的清扫电动推杆、位于两个导向板之间且下端设有两个安装竖板的安装架,两端与两个安装竖板一一对应连接的电动滚筒,套装于电动滚筒外的滚刷,两个一一对应装于两个安装竖板的相对外侧且一一对应位于两个导向板的竖向导孔中的导块,设有两个侧板且后端设有出料门的垃圾斗,两个位于导向板后侧且与两个侧板一一对应的升降组件,位于两个升降组件之间且与安装台板下端连接的升降机器人舵机;升降组件包括:分别与安装台板下端连接的前挂架、后挂架,两个上端设有与前挂架下端和后挂架下端一一对应铰接的连接轴的摆臂,两个摆臂平行设置且下端分别与一个侧板铰接;升降机器人舵机的输出轴与一个连接轴连接;清扫电动推杆的推杆与安装架上端连接;清扫电动推杆、电动滚筒、升降机器人舵机分别与控制器电性连接。
8.作为优选,所述的拿物装置包括:与安装台板上端连接的电动转盘,与电动转盘上端连接的第一双轴舵机,两个一端分别与第一双轴舵机的两个输出轴一一对应连接的第一
俯仰转臂,两个输出轴与两个第一俯仰转臂另一端一一对应连接的第二双轴舵机,两个一端分别与第二双轴舵机连接的第二俯仰转臂,两个输出轴与两个第二俯仰转臂另一端一一对应连接的第三双轴舵机,一端与第三双轴舵机连接的固定板,与固定板另一端连接的侧转机器人舵机,设有与侧转机器人舵机的输出轴连接的连接板的安装座,后端与安装座上端连接的夹持机械手,与安装座下端连接的夹持机器人舵机;夹持机械手包括两个设有相互啮合的圆弧形外齿段的驱动臂;夹持机器人舵机的输出轴与一个驱动臂连接;电动转盘、第一双轴舵机、第二双轴舵机、第三双轴舵机、侧转机器人舵机和夹持机器人舵机分别与控制器电性连接。
9.作为优选,所述的升降擦地装置包括:与安装台板下端连接的横向电动直线滑座,上端与横向电动直线滑座的滑块连接的擦地电动推杆,上端与擦地电动推杆的推杆连接的电动刷盘;横向电动直线滑座、擦地电动推杆和电动刷盘分别与控制器电性连接。
10.作为优选,所述的喷洒装置包括:穿设于安装台板中且设有与安装台板上端连接的凸缘的水箱,与安装台板上端连接的蒸气发生器,设有蒸气电磁阀且两端与蒸气发生器和水箱一一对应连通的蒸气管,上端与水箱连通且设有喷洒电磁阀的竖水管,与竖水管下端连通的横水管;喷头装于横水管下侧;蒸气电磁阀、喷洒电磁阀分别与控制器电性连接。
11.作为优选,所述的巡航避障装置包括:与前轮架前端连接的机器视觉系统、红外传感器和超声波测距仪;机器视觉系统、红外传感器和超声波测距仪分别与控制器电性连接。
12.作为优选,所述的环境监测装置包括:与安装台板上端连接的烟雾传感器,噪声测试仪,温度传感器,湿度传感器;烟雾传感器、噪声测试仪、温度传感器和湿度传感器分别与控制器电性连接。
13.作为优选,所述的控制器设有语音识别模块、无线信号发射模块、显示屏和报警装置置。
14.与现有技术相比,本实用新型的有益效果是:
15.1、所述的多功能机器人,除用于清洁工作外,还具有多种用途;通过控制器控制调整轮毂电机的转速可以调整小车的行走速度和行走方向,清扫地面时,通过升降清扫装置将垃圾扫入垃圾斗,清除地面污垢时,通过喷洒装置的电动刷盘刷除地面污垢,蒸气发生器可以改善提高环境的温度和湿度,且蒸气经蒸气管进入水箱对水进行加热,可以提高刷除地面污垢的效果,在巡航避障装置监测下,小车行走到物品处,通过拿物装置的夹持机械手夹住物品并将物品转运到设定方位,通过巡航避障装置可以感知小车行走方向有无障碍,如有障碍,控制器控制调整小车行走方向或停止行走,通过环境监测装置的烟雾传感器监测烟雾浓度、噪声测试仪监测噪声、温度传感器和湿度传感器监测环境温度和湿度,当烟雾浓度、噪声、环境温度和湿度超出设定范围时,在控制器的显示屏显示,且报警装置报警,当用户不在室内,语音识别模块、机器视觉系统感知有陌生人进入室内时,可以通过无线信号发射模块将视觉图像传至手机通知用户,掌握室内的情况。
16.2、升降清扫装置的滚刷、垃圾斗,升降擦地装置的电动刷盘在不工作时可以升高减小小车行走阻力。减震前轮组件利于小车在不平地面、地毯突起处行走时有效减震。
17.3、拿物装置通过多个机器人舵机、多个双轴舵机进行转动驱动,结构紧凑转动精度高。垃圾斗后端设有出料门利于清除垃圾斗中垃圾。
附图说明
18.为了更清楚的说明本实用新型实施例或现有技术的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
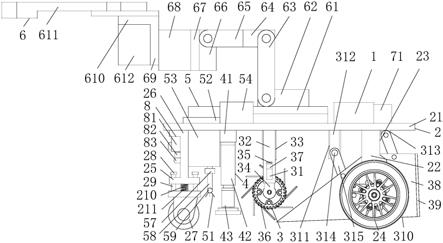
19.图1是本实用新型的一种结构示意图;
20.图2是图1的俯视结构示意图。
21.图中:控制器1,语音识别模块11,无线信号发射模块12,显示屏13,报警装置14,小车2,安装台板21,支承竖板22,后轮架23,电动轮24,横板25,前轮架26,滚轮27,挡圈28,导向柱29,压簧210,定位柱211,升降清扫装置3,竖向导孔31,导向板32,清扫电动推杆33,安装竖板34,安装架35,滚刷36,导块37,侧板38,出料门39,垃圾斗310,升降机器人舵机311,前挂架312,后挂架313,连接轴314,摆臂315,升降擦地装置4,横向电动直线滑座41,擦地电动推杆42,电动刷盘43,喷洒装置5,喷头51,凸缘52,水箱53,蒸气发生器54,蒸气电磁阀55,蒸气管56,喷洒电磁阀57,竖水管58,横水管59,拿物装置6,电动转盘61,第一双轴舵机62,第一俯仰转臂63,第二双轴舵机64,第二俯仰转臂65,第三双轴舵机66,固定板67,侧转机器人舵机68,连接板69,安装座610,夹持机械手611,夹持机器人舵机612,圆弧形外齿段613,驱动臂614,环境监测装置7,烟雾传感器71,噪声测试仪72,温度传感器73,湿度传感器74,巡航避障装置8,机器视觉系统81,红外传感器82,超声波测距仪83。
具体实施方式
22.下面通过具体实施例,对本实用新型的技术方案作进一步的具体说明。应当理解,本实用新型的实施并不局限于下面的实施例,对本实用新型所做的任何形式上的变通和/或改变都将落入本实用新型保护范围。
23.在本实用新型中,若非特指,所有的份、百分比均为重量单位,所采用的设备和原料等均可从市场购得或是本领域常用的。下述实施例中的方法,如无特别说明,均为本领域的常规方法。
实施例
24.一种多功能机器人,其结构如附图1、附图2所示,包括:控制器1,小车2,装于小车2上的升降清扫装置3、位于升降清扫装置3前侧的升降擦地装置4、设有位于升降擦地装置4前侧的多个喷头51的喷洒装置5,装于小车2上端的拿物装置6、环境监测装置7,装于小车2前端的巡航避障装置8。
25.所述的小车2包括:安装台板21,下端设有两个支承竖板22且与安装台板21下端螺接的后轮架23,两个设有轮毂电机(未图示)且一一对应装于两个支承竖板22上的电动轮24,下端设有横板25且与安装台板21下端螺接的前轮架26,两个横向并列设置的减震前轮组件;减震前轮组件包括:滚轮27,两个上端设有挡圈28的导向柱29,压簧210,两个一一对应装于横板25下端和滚轮27上端的定位柱211,两个设于横板25上的导向孔(未图示);两个导向柱29的下端一一对应穿过两个导向孔且分别与滚轮27上端螺接;压簧210的两端一一对应套在两个定位柱211外且一一对应压住横板25下端和滚轮27上端;轮毂电机与控制器1
电性连接。控制器1装于安装台板21上端。
26.所述的升降清扫装置3包括:装于安装台板21下端的两个设有竖向导孔31且横向并列设置的导向板32、位于两个导向板32之间的清扫电动推杆33、位于两个导向板32之间且下端设有两个安装竖板34的安装架35,两端与两个安装竖板34一一对应螺接的电动滚筒(未图示),套装于电动滚筒外的滚刷36,两个一一对应装于两个安装竖板34的相对外侧且一一对应位于两个导向板32的竖向导孔31中的导块37,设有两个侧板38且后端设有出料门39的垃圾斗310,两个位于导向板32后侧且与两个侧板38一一对应的升降组件,位于两个升降组件之间且与安装台板21下端螺接的升降机器人舵机311;升降组件包括:分别与安装台板21下端螺接的前挂架312、后挂架313,两个上端设有与前挂架312下端和后挂架313下端一一对应铰接的连接轴314的摆臂315,两个摆臂315平行设置且下端分别与一个侧板38通过铰接轴铰接;升降机器人舵机311的输出轴与一个连接轴314键连接;清扫电动推杆33的推杆与安装架35上端铰螺接;清扫电动推杆33、电动滚筒、升降机器人舵机311分别与控制器1电性连接。导块37的宽度与竖向导孔31的宽度间隙配合。
27.所述的拿物装置6包括:与安装台板21上端螺接的电动转盘61,与电动转盘61上端螺接的第一双轴舵机62,两个一端分别与第一双轴舵机62的两个输出轴一一对应螺接的第一俯仰转臂63,两个输出轴与两个第一俯仰转臂63另一端一一对应螺接的第二双轴舵机64,两个一端分别与第二双轴舵机64螺接的第二俯仰转臂65,两个输出轴与两个第二俯仰转臂65另一端一一对应螺接的第三双轴舵机66,一端与第三双轴舵机66螺接的固定板67,与固定板67另一端螺接的侧转机器人舵机68,设有与侧转机器人舵机68的输出轴键连接的连接板69的安装座610,后端与安装座610上端螺接的夹持机械手611,与安装座610下端螺接的夹持机器人舵机612;夹持机械手611包括两个设有相互啮合的圆弧形外齿段613的驱动臂614;夹持机器人舵机612的输出轴与一个驱动臂614键连接;电动转盘61、第一双轴舵机62、第二双轴舵机64、第三双轴舵机66、侧转机器人舵机68和夹持机器人舵机612分别与控制器1电性连接。夹持机械手611为现有技术。
28.所述的升降擦地装置4包括:与安装台板21下端螺接的横向电动直线滑座41,上端与横向电动直线滑座41的滑块螺接的擦地电动推杆42,上端与擦地电动推杆42的推杆螺接的电动刷盘43;横向电动直线滑座41、擦地电动推杆42和电动刷盘43分别与控制器1电性连接。
29.所述的喷洒装置5包括:穿设于安装台板21中且设有与安装台板21上端螺接的凸缘52的水箱53,与安装台板21上端螺接的蒸气发生器54,设有蒸气电磁阀55且两端与蒸气发生器54和水箱53一一对应连通的蒸气管56,上端与水箱53连通且设有喷洒电磁阀57的竖水管58,与竖水管58下端连通的横水管59;喷头51装于横水管59下侧;蒸气电磁阀55、喷洒电磁阀57分别与控制器1电性连接。
30.所述的巡航避障装置8包括:与前轮架26前端螺接的机器视觉系统81、红外传感器82和超声波测距仪83;机器视觉系统81、红外传感器82和超声波测距仪83分别与控制器1电性连接。
31.所述的环境监测装置7包括:与安装台板21上端螺接的烟雾传感器71,噪声测试仪72,温度传感器73,湿度传感器74;烟雾传感器71、噪声测试仪72、温度传感器73和湿度传感器74分别与控制器1电性连接。
32.所述的控制器1设有语音识别模块11、无线信号发射模块12、显示屏13和报警装置14。报警装置14为语音报警装置。
33.本发明所述的多功能机器人的清洁工作、拿物和环境监测方法,所述的多功能机器人为上述的多功能机器人,
34.(1)控制器1控制两个设有轮毂电机的电动轮24驱动小车2按设定路径行走,调整轮毂电机的转速可以调整小车2的行走速度和行走方向;
35.(2)清扫地面时,升降清扫装置3的升降机器人舵机311驱动摆臂315转动使垃圾斗310落于地面,清扫电动推杆33经安装架35驱动电动滚筒和滚刷36下降,电动滚筒带动滚刷36转动将垃圾扫入垃圾斗310;
36.(3)清除地面污垢时,开启喷洒电磁阀57,水从喷洒装置5的水箱53经竖水管58、横水管59从喷头51向地面喷洒,升降擦地装置4的擦地电动推杆42的推杆驱动电动刷盘43下降,横向电动直线滑座41驱动电动刷盘43横向运动,电动刷盘43刷除地面污垢;
37.(4)蒸气发生器54可以改善提高环境的温度和湿度,开启蒸气电磁阀55,蒸气经蒸气管56进入水箱53对水进行加热,提高刷除地面污垢的效果;
38.(5)在巡航避障装置8监测下,小车2行走到物品处,在拿物装置6的电动转盘61、第一双轴舵机62、第二双轴舵机64、第三双轴舵机66、侧转机器人舵机68的驱动下,夹持机械手611运动到需要拿物的方位,夹持机械手611在夹持机器人舵机612驱动下夹住物品并转运到设定方位;
39.(6)通过巡航避障装置8的机器视觉系统81、红外传感器82和超声波测距仪83感知小车2行走方向有无障碍,如有障碍,控制器1控制调整小车2行走方向或停止行走;
40.(7)通过环境监测装置7的烟雾传感器71监测烟雾浓度、噪声测试仪72监测噪声、温度传感器73和湿度传感器74监测环境温度和湿度,当烟雾浓度、噪声、环境温度和湿度超出设定范围时,在控制器1的显示屏13显示,且报警装置14报警,以便及时采取措施;
41.(8)当用户不在室内,语音识别模块11、机器视觉系统81感知有陌生人进入室内时,可以通过无线信号发射模块12将视觉图像传至手机通知用户,掌握室内的情况。
42.除上述实施例外,在本实用新型的权利要求书及说明书所公开的范围内,本实用新型的技术特征或技术数据可以进行重新选择及组合,从而构成新的实施例,这些都是本领域技术人员无需进行创造性劳动即可实现的,因此这些本实用新型没有详细描述的实施例也应视为本实用新型的具体实施例而在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1