一种磁吸附式玻璃清洁机器人
1.本实用新型涉及机械设备技术领域,具体涉及的是一种磁吸附式玻璃清洁机器人。
背景技术:
2.近年来,城市中的高层建筑越来越多,人们居住的楼层也越来越高,擦玻璃变成了一种困难且具有危险性的事情。以前,对高层建筑的玻璃窗的清洗工作主要由清洗工人搭乘吊篮完成的,传统的人工清洁方式既危险,效率又低且成本高,但如果自己清洁的话不仅危险而且费时费力。
3.基于此,玻璃清洁机器人应运而生,可有效降低清洁高层玻璃所存在的安全隐患,并具有省时省力的优势。目前,市面上的玻璃清洁机器人主要由清洗单元(主要由水箱、洒水刷、抹布等构成)、行走轮、行走轮驱动电机、控制器、转向机构(主要由舵机、行走轮构成)和供电装置构成,需要清洁玻璃时,利用行走轮驱动电机控制行走轮转动,并依靠转向机构的转向控制,使得机器人可以来回在玻璃上移动,从而利用清洗单元实现对玻璃的清洁。
4.然而,现有的玻璃清洁机器人,工作时大多只能清洁靠近室内的这一面或者室外的一面,无法满足同时清洁玻璃内外表面的需求,效率不高;并且现有的玻璃清洁机器人还存在清洗不够干净的问题。
技术实现要素:
5.本实用新型的目的在于提供一种磁吸附式玻璃清洁机器人,能实现同时清洁玻璃内外表面,不仅能提高效率,而且能提高玻璃清洁度。
6.为实现上述目的,本实用新型采用的技术方案如下:
7.一种磁吸附式玻璃清洁机器人,包括具有第一清洗单元、第一行走轮、行走轮驱动电机、控制器、转向机构和供电装置的第一机器人主体,还包括第二机器人主体;所述第二机器人主体包括壳体,以及分别设置在壳体内的第二清洗单元、第二行走轮、万向轮、第二中心电磁铁和第二超声波除尘器;且第二超声波除尘器靠近万向轮,第二清洗单元位于第二行走轮与万向轮之间;
8.所述第一机器人主体内还分别设有第一中心电磁铁和第一超声波除尘器;且第一超声波除尘器靠近转向机构,第一清洗单元位于第一行走轮与转向机构之间;
9.所述供电装置同时与第一中心电磁铁、第一超声波除尘器、第二中心电磁铁和第二超声波除尘器连接;
10.所述第一机器人主体和第二机器人主体通过第一中心电磁铁和第二中心电磁铁通电相互吸附的方式位于待清洁玻璃的内、外表面,并由第一行走轮带动做同步移动。
11.进一步地,所述第一机器人主体外缘均布有若干避障传感装置,所有的避障传感装置均与控制器连接。
12.作为优选,所述避障传感装置为激光传感器、红外传感器、超声波传感器中的任意
一种或几种。
13.再进一步地,所述第一机器人主体上还设有与控制器连接用于使控制器与控制终端连接从而实现第一机器人主体移动路径规划的蓝牙模块。
14.具体地,所述控制终端为带有蓝牙功能的手机、平板、电脑中的任意一种。
15.再进一步地,所述第二机器人主体上还设有太阳能板,该太阳能板接入供电装置。
16.与现有技术相比,本实用新型具有以下有益效果:
17.(1)本实用新型采用双机器人的设计,一个用于玻璃内表面清洁,一个用于玻璃外表面清洁,通过设置中心电磁铁,利用电磁铁通电相互吸附的方式,使两个机器人可以同步运动,从而利用各自的清洗单元实现对玻璃内外表面的清洁,提高了工作效率。同时,本实用新型还结合了超声波除尘器的设计,超声波除尘器位于清洗单元前部,先用超声波将玻璃内外表面的灰尘除去,再通过机械力的方式清洗玻璃上的污物,如此一来,由于采用了电磁吸附使两个机器人贴合,所以作用在两个机器人各自的清洗单元上的作用力更大,因而在此基础上采用超声除尘+机械力清洁可以使玻璃的清洗更为干净,且不易留划痕,保持了玻璃的美观及使用寿命。
18.(2)本实用新型设置了避障传感装置,利用避障传感装置的检测,可以及时将避障信号反馈到控制器,再由控制器控制机器人的转向,从而使机器人对玻璃的清洁更加智能、方便。
19.(3)本实用新型还设置了蓝牙模块,在此基础上,通过蓝牙模块可使控制器与诸如手机、平板、电脑等控制终端实现连接,再经由控制终端上的app或软件进行路径规划,并反馈至控制器中,由控制器按照路径控制机器人行走,可以实现机器人对玻璃的全面、无死角清洁,进一步提高了玻璃的清洁度。
20.(4)本实用新型在第二机器人主体上还设置了太阳能板,并接入供电电路中,依靠太阳能与供电装置的共同供电,可在一定程度上节约电能。
21.(5)本实用新型体积小巧、携带方便,使用效果良好,适合在各大家庭中推广。
附图说明
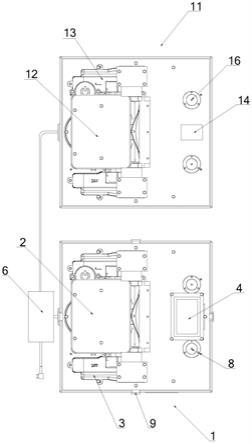
22.图1为本实用新型-实施例去掉上壳体后的结构示意图。
23.图2为本实用新型-实施例中第一机器人主体的结构示意图。
24.图3为本实用新型-实施例中第一机器人主体翻转后的结构示意图。
25.其中,附图标记对应的零部件名称为:
26.1-第一机器人主体,2-第一清洗单元,3-第一行走轮,4-控制器,5-转向机构,6-供电装置,7-第一中心电磁铁,8-第一超声波除尘器,9-避障传感装置,10-蓝牙模块,11-第二机器人主体,12-第二清洗单元,13-第二行走轮,14-万向轮,15-第二超声波除尘器。
具体实施方式
27.下面结合附图说明和实施例对本实用新型作进一步说明,本实用新型的实施包含但不限于以下实施例。
28.实施例
29.本实施例公开了一种磁吸附式玻璃清洁机器人,能实现同时清洁玻璃内外表面,
并采用除尘和清洁结合的方式充分提高对玻璃的清洁度。本实用新型结构上包括第一机器人主体1和第二机器人主体2,两个机器人结构大体相同,都具有壳体(壳体由上壳体和下壳体组成)、清洗单元、行走轮等结构,其中,如图1~3所示,所述第一机器人主体1具有第一清洗单元2、第一行走轮3、行走轮驱动电机、控制器4、转向机构5、供电装置6、第一中心电磁铁7、第一超声波除尘器8以及四个避障传感装置9(避障传感装置9可采用激光传感器、红外传感器、超声波传感器中的任意一种或几种)。所述第二机器人主体11包括分别设置在壳体内的第二清洗单元12、第二行走轮13、万向轮14、第二中心电磁铁和第二超声波除尘器15。
30.本实用新型体积小巧,可以手持,工作时,首先接通电源(本实用新型可采用市电或蓄电池方式实现供电),然后手动将第一机器人主体1放在待清洁玻璃内表面上,再手动将第二机器人主体2放在待清洁玻璃外表面上,并依靠第一中心电磁铁7和第二中心电磁铁相互吸附的方式校准好第一机器人主体1和第二机器人主体2的相对位置。
31.而后,松手,并开启两个机器人上的工作开关,此时,在行走轮驱动电机的控制下,第一机器人主体1依靠第一行走轮3的带动开始通过第一清洗单元2和第一超声波除尘器8对玻璃内表面进行除尘和清洗(先超声除尘,紧接着是清洗);与此同时,第二机器人主体2在第一机器人主体1带动下,依靠第二行走轮13也开始移动,并通过第二清洗单元12和第二超声波除尘器15对玻璃外表面进行除尘和清洗(同样是先除尘,再清洗)。
32.在清洗玻璃过程中,依靠避障传感装置的作用,可以实时将避障信号反馈到控制器4,再由控制器4通过转向机构5控制第一机器人主体1的转向。第一机器人主体1转向的同时,依靠第一中心电磁铁7、第二中心电磁铁和万向轮14的作用,也同步带动第二机器人主体2实现转向。如此即可很好地对玻璃内外表面进行清洁。
33.此外,所述第一机器人主体1上还设有与控制器4连接的蓝牙模块10,从而可以使控制器14与控制终端(例如带有蓝牙功能的手机、平板或电脑)连接,实现第一机器人主体1移动路径的规划,例如,在将控制器与手机建立通讯后,用户根据玻璃的结构情况,利用手机上的app预设好清洁路径,然后通过蓝牙模块将路径信息发送至控制器中,控制器便可按照规划的路径信息控制机器人转向。如此可以很好地实现机器人对玻璃的全面、无死角清洁,进一步提高玻璃的清洁度。
34.另外,本实施例亦可考虑在第二机器人主体11上设置太阳能板,并接入供电电路中,依靠太阳能与供电装置的共同供电,可在一定程度上节约电能。
35.本实用新型采用现有成熟的控制技术和设备,很好地改善了玻璃清洁机器人的实用性能,为提升玻璃清洗效率及其清洗效果提供了良好的保障。本实用新型体积小巧、操作便捷、实用性强、适合家庭使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1