一种具有基站的清洁机系统的制作方法
1.本实用新型属于家庭洗涤、清扫领域,具体涉及一种具有基站的清洁机系统。
背景技术:
2.目前,地面清洁机为吸尘器或扫地机,吸尘器或扫地机中将底面上混有水汽的灰尘等混合物吸入到其内腔中。
3.目前,为了对清洁机内部进行清洁,通常设置基站,如中国发明专利申请《一种集尘导通结构、具有其的移动清洁系统》,其专利申请号为cn202010287258.x(申请公布号为cn111419124a)公开了一种集尘导通结构,用于将移动机器人中收集的灰尘自动排出,其包括排尘口,设于移动机器人的侧部或底部,并与移动机器人内部设置的尘盒内部连通;吸尘口,设置于基座上,用于接收从所述排尘口排出的灰尘,所述基座用于接收所述移动机器人;其中,在所述移动机器人排尘的状态下,所述排尘口与所述吸尘口相对,所述排尘口与所述吸尘口通过可伸缩的连接通道联通。
4.上述专利中虽然在移动机器人移动至基站内的状态下能实现移动机器人的排尘口和基站的吸尘口的自动对接,但是排尘口的打开或关闭通常通过设置在移动机器人(清洁机)的控制机构实现,在移动机器人进行清扫过程中,可能会存在触碰到移动机器人的控制按钮而导致排尘口打开从而弄脏待清洁的地面。
5.因此,需要对现有的清洁机作进一步的改进。
技术实现要素:
6.本实用新型所要解决的技术问题是针对上述现有技术的现状,提供一种清洁机中的垃圾仅排至基站中以避免排至待清洁物而污染待清洁物的具有基站的清洁机系统。
7.本实用新型解决上述技术问题所采用的技术方案为:一种具有基站的清洁机系统,包括有
8.清洁机,包括有壳体,所述壳体具有用来储存垃圾的储存腔,且该壳体上具有与所述储存腔相连通的排污口;
9.基站,包括有具有容腔的基座和设置在基座上的集污装置,所述容腔的前侧具有供所述清洁机进入的敞口,在所述清洁机进入所述容腔的状态下,所述集污装置与所述排污口流体连通;其特征在于,还包括有
10.封堵组件,设置在所述壳体上,且被布置成相对所述排污口运动而用来打开或关闭所述排污口;
11.推动件,设置在所述基座上,且在所述清洁机位于所述容腔内的状态下,所述推动件与所述封堵组件对应设置;及
12.驱动机构,其动力输出端与所述推动件驱动连接,用来驱动所述推动件朝所述封堵组件方向运动继而带动所述封堵组件的至少部分朝远离所述排污口运动以打开所述排污口。
13.驱动机构的结构形式有多种,但是优选地,所述驱动机构包括有电机、螺杆和用来带动所述螺杆绕自身轴线转动的传动组件,所述推动件为局部具有内螺纹的螺套,所述电机设置在所述基座上,且具有与所述螺套并排布置的输出轴,所述传动组件的一端与所述电机之输出轴相连接,所述传动组件的另一端与所述螺杆相连接,所述螺杆至少局部位于所述螺套内并与所述螺套螺纹连接。如此,带动螺套沿着螺杆的长度方向来回运动。
14.上述的传动组件可以采用齿轮和齿带的形式,具体地,电机的输出轴上安装有主动齿轮,从动齿轮与螺杆相固定连接,传动齿带环绕在主动齿轮和从动齿轮的外围且与主动齿轮和从动齿轮啮合,从而在电机工作时,通过主动齿轮、从动齿轮和传动齿带的传动,实现螺杆的转动,继而带动螺套沿着其长度方向来回运动;传动组件还可以采用齿轮啮合的形式,具体地,电机的输出轴上安装有主动齿轮,从动齿轮与螺杆相固定连接,主动齿轮和从动齿轮相啮合,从而在电机工作时,带动螺杆转动;此外,传动组件还可以采用双联齿轮的形式,只要能实现螺杆转动继而带动螺套沿着其长度方向来回运动即可。
15.排污口可以设置在壳体的顶部,也可以设置在壳体的底部,但是优选地,所述排污口开设在所述壳体的底部,所述壳体上设置有位于所述储存腔内且与所述排污口相对应的环壁,所述环壁竖向设置,所述壳体的顶部在对应环壁的位置上开设有缺口,所述封堵组件包括有封堵件、竖向设置的活动件及至少局部位于所述活动件之上的按钮,所述活动件和按钮均位于所述环壁的內腔中,所述活动件和按钮之间匹配设置有在所述活动件被按压以使封堵件封堵住所述排污口的状态下能使所述活动件定位在所述环壁上且在所述活动件继续被按压后能解除所述活动件的定位状态的定位解锁结构,所述封堵组件还包括有作用在所述活动件上且在所述活动件处于解锁状态下具有带动所述封堵件向上运动而打开所述排污口趋势的弹性件。
16.定位解锁结构的形式有多种,但是优选地,所述定位解锁结构包括有设置在所述环壁的内周壁上的导向槽和阻挡部以及设置在所述活动件外周壁上的凸部,所述导向槽竖向延伸,且与所述阻挡部错位布置,所述凸部具有位于所述导向槽内的第一状态及向下离开所述导向槽后沿所述环壁周向转动至与所述阻挡部的底面相抵继而使所述封堵件关闭所述排污口的第二状态,所述按钮上设置有在所述凸部处于脱离导向槽的状态下能带动所述凸部转动从而使该凸部在第一状态和第二状态来回运动的推动部。
17.推动部的结构形式有多种,可以采用呈倒三角形的凸块的形式,还可以采用其他的形式,但是优选地,所述推动部为设置在所述按钮底面上的凸块,所述凸块的纵截面呈倒三角形,所述凸块有多个,且沿周向依次布置,所述凸部的顶面为自上而下逐渐沿其转动方向倾斜的倾斜面,在所述按钮处于被按压的状态下,所述凸部的倾斜面与所述凸块的斜面相配合并在所述凸块的推动下处于转动状态。
18.优选地,所述基座上具有与所述集污装置流体连通的进污口,且在所述清洁机进入所述容腔的状态下,所述进污口与所述排污口相连通。
19.为了实现排污口和进污口的自动对接,所述排污口和进污口之间通过能伸缩的伸缩管相连接,所述伸缩管设置在所述排污口和进污口的其中一个污口上,且能在驱动组件的驱动下靠近或远离另一个污口运动而实现所述伸缩管和对应污口的连通或脱离。
20.伸缩管可以设置在基站的进污口上,也可以设置在清洁机的排污口上,但是优选地,所述伸缩管与所述进污口相连接,所述基座上开设有供所述伸缩管穿出的开口,所述驱
动组件包括有磁性件和能与所述磁性件磁性吸合的电磁铁,所述磁性件和电磁铁的其中一个设置在所述伸缩管上,另一个设置在邻近所述排污口的位置处。
21.为了实现伸缩管与排污口的可靠对接,所述伸缩管邻近所述排污口的第一端的周沿侧向延伸形成有能穿出所述开口的环形挡沿,在所述排污口和进污口处于对接状态下,所述环形挡沿位于所述磁性件和电磁铁之间,从而在所述磁性件和电磁铁处于磁性吸合状态下实现形成所述环形挡沿与清洁机对应位置的密封连接。
22.优选地,所述电磁铁和磁性件均呈环状,且所述电磁铁位于所述伸缩管的外围且设置在所述环形挡沿远离所述排污口的一侧,所述磁性件设置在所述排污口的外围。
23.为了实现伸缩管与集污装置的连接,该清洁机系统还包括有连接管及用来向所述连接管内提供抽吸负压的负压发生器,所述连接管的第一端与所述伸缩管的第二端相连通,且该连接管的第一端的端口即为所述的进污口,所述连接管的第二端与所述集污装置相连通。
24.与现有技术相比,本实用新型的优点在于:该具有基站的清洁机系统中的清洁机在进入至基站的容腔内时,基站上的推动件与封堵组件相对应,驱动机构驱动推动件朝封堵组件方向运动后继而带动封堵组件的至少部分朝远离排污口方向运动而打开排污口,因此,清洁机的排污口仅通过基站上的推动件和驱动机构配合实现封堵组件对排污口的启闭,因此,克服了背景技术中在清洁机工作过程中无意触碰而导致排污口开启而弄脏待清洁物体;并且在清洁机进入基站后能自动实现对排污口的开启,更加地方便。
附图说明
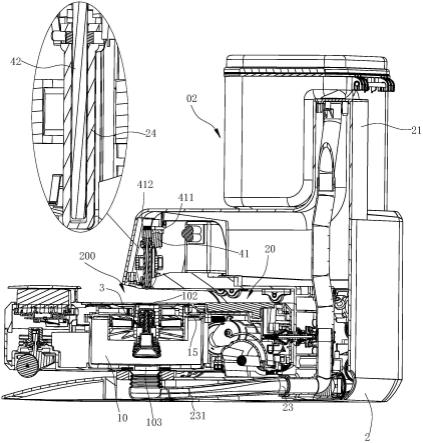
25.图1为本实施例中扫地机进入至基站容腔状态下的剖视图;
26.图2为图1中排污口和伸缩管的上端处于对接状态下的剖视图;
27.图3为本实施例中扫地机进入至基站容腔中且排污口处于打开状态下的剖视图;
28.图4为扫地机中排放口处于打开状态下的部分结构的剖视图;
29.图5为按钮的结构示意图;
30.图6为活动件的结构示意图;
31.图7为支架的结构示意图;
32.图8为图7的剖视图;
33.图9为图3的另一角度的剖视图。
具体实施方式
34.以下结合附图实施例对本实用新型作进一步详细描述。
35.如图1至图9所示,本实施例的清洁机系统包括有清洁机01和基站02,其中清洁机为扫地机器人。
36.如图1至图3和图9所示,基站02包括有连接管23、负压发生器、具有容腔20 的基座2和设置在基座2上的集污装置21,本实施例中的集污装置21设置在基座2之上。容腔20的前侧具有供清洁机01进入的敞口200,且该基座2上具有与集污装置21 流体连通的进污口231,具体地,基座2的内部具有空腔,连接管23位于空腔内,且连接管23的第一端的端口即为进污口231,进污口231位于容腔20之下,连接管23的第二端与集污装置21相连通。
37.该实施例中的扫地机器人包括有分离模块、用来对待清洁物体进行清扫的刷头模块 (未示出)和风机,沿着气流流动路径,分离模块位于刷头模块和风机之间,刷头模块位于分离模块的上游。分离模块的进风口与刷头模块的出口相连通,分离模块的排风口与风机的进口相连通。在风机的作用下,会使刷头模块和分离模块内形成负压,从而将灰尘、水等垃圾经刷头模块的吸尘口吸入刷头模块内,随后将经分离模块进行分离后,大部分沉积在储存腔的底部,分离后的气体排出。
38.如图1至图9所示,上述的分离模块包括有壳体1、过滤网6和封堵组件3。壳体 1具有用来储存垃圾的储存腔10,为了方便将储存腔10内的垃圾排出,前述储存腔10 的底部具有排污口103,在清洁机01进入容腔20的状态下,排污口103与进污口231 相连通。
39.本实施例中的排污口103和进污口231之间通过能伸缩的伸缩管22相连接,伸缩管22设置在排污口103和进污口231的其中一个污口上,且能在驱动组件的驱动下靠近或远离另一个污口运动而实现伸缩管22和对应污口的连通或脱离。在本实施例中的伸缩管22局部竖向设置,且该伸缩管22的下端与连接管23的进污口231相连接,基座2上开设有供伸缩管22穿出的开口201。前述的伸缩管22在驱动组件的驱动下靠近或远离排污口103从而实现伸缩管22的上端和对应污口的连通或脱离。驱动组件包括有磁性件13和能与磁性件13磁性吸合的电磁铁,磁性件13和电磁铁222的其中一个设置在伸缩管22上,另一个设置在邻近排污口103的位置处。具体地,伸缩管22邻近排污口103的第一端的周沿侧向延伸形成有能穿出开口201的环形挡沿221,在排污口 103和进污口231处于对接状态下,环形挡沿221位于磁性件13和电磁铁之间。在本实施例中,电磁铁和磁性件13均呈环状,且电磁铁222位于伸缩管22的外围且设置在环形挡沿221的下表面上,磁性件13设置在排污口103的外围,且能与对应的电磁铁磁性吸合,从而形成环形挡沿221与清洁机01对应位置的密封连接,具体参见图2所示。
40.为了将扫地机储存腔内的垃圾吸入至集污装置中,负压发生器用来向连接管23内提供抽吸负压,从而将储存腔内的垃圾经排污口、进污口、连接管抽吸至集污装置中,前述的负压发生器为水泵。
41.在扫地机进入至基站的容腔中的状态下,为了实现对封堵组件进行按压,推动件设置在基座2上,且在自然状态下位于容腔20之上。在清洁机01位于容腔20内的状态下,推动件与封堵组件3对应设置,且该推动件在驱动机构4的驱动下上下运动从而实现对按钮的按压。驱动机构4的动力输出端与推动件驱动连接,用来驱动推动件朝封堵组件3方向运动继而带动封堵组件3的至少部分朝远离排污口103运动以打开排污口 103。具体地,如图3和图9所示,驱动机构4包括有电机41、螺杆42和用来带动螺杆 42绕自身轴线转动的传动组件,推动件为局部具有内螺纹的螺套24,电机41设置在基座2上,且具有与螺套24并排布置的输出轴,传动组件(未标出)的一端与电机41之输出轴相连接,螺杆42竖向设置,且该螺杆42局部位于螺套24内并与螺套24螺纹连接,传动组件的另一端与螺杆42相连接。本实施例中的传动组件包括有主动齿轮411 和从动齿轮421,电机41的输出轴上安装有主动齿轮411,从动齿轮421与螺杆42相固定连接,主动齿轮411和从动齿轮421相啮合,从而在电机工作时,通过主动齿轮和从动齿轮的传动,实现螺杆42的转动,继而带动螺套24沿着其长度方向来回运动。
42.如图7所示,储存腔10的顶部在对应排污口103的位置上设置有支架15,支架15 具
有环壁11,环壁11竖向设置,壳体1在对应环壁11的位置上开设有缺口102,如此,实现环壁11的上下贯通。过滤网6位于环壁11的外围,经进风口流入的流体经过滤网 6过滤后经排风口排出净化的空气。封堵组件3设置在清洁机01上,且被布置成相对排污口103运动而用来打开或关闭排污口103。具体地,封堵组件3包括有弹性件、封堵件31、竖向设置的活动件32及至少局部位于活动件32之上的按钮33,活动件32和按钮33均位于环壁11的內腔中,活动件32和按钮33之间匹配设置有在活动件32被按压以使封堵件31封堵住排污口103的状态下能使活动件32定位在环壁11上且在活动件32继续被按压后能解除活动件32的定位状态的定位解锁结构,定位解锁结构包括有设置在环壁11的内周壁上的导向槽111和阻挡部以及设置在活动件32外周壁上的凸部 321,导向槽111竖向延伸,且与阻挡部错位布置,如图7和图8所示,环壁11的内周壁上凸设有多个竖向延伸的导向条112,前述的导向条112即为上述的阻挡部,相邻两个导向条112之间形成有导向槽111,如此,导向槽111有多个且沿周向间隔布置。此外,导向条112的内周壁局部向外凹陷形成有滑槽1121,滑槽1121竖向延伸。按钮33 位于环壁11的內腔中,且该按钮33的外周壁上侧向凸出有延伸部332,延伸部332至少局部位于滑槽1121内,且能沿着滑槽1121上下滑动。
43.如图1至图3所示,前述的封堵件31包括有竖向设置的支撑件311及位于支撑件 311外围且能上下伸缩的伸缩套312,支撑件311与活动件32相连接,伸缩套312的上端与环壁11的相连接,伸缩套312的下端位于支撑件311的下周沿之下且与支撑件311 相连接,该伸缩套312的底部位于支撑件311和排污口103的内周沿之间而能封堵住排污口103。
44.如图3所示,活动件32与封堵件31之支撑件311通过螺钉相连接,如此在活动件 32上下运动时,能带动封堵件31上下运动,从而打开或关闭的排污口103。此外,如图6所示,活动件32的外周壁上侧向凸设有多个沿周向间隔布置的凸部321,每个导向槽111对应有一个凸部321,且凸部321的顶面为自上而下逐渐沿其转动方向倾斜的倾斜面3211。此外,凸部321具有位于对应导向槽111内的第一状态及向下离开导向槽 111后沿环壁11内周壁的周向转动至与导向条112的底面相抵继而使封堵件31关闭排污口103的第二状态。其中第一状态具体参见图3所示,第二状态具体参见图2所示。为了在封堵件31关闭排污口103时,对凸部321进行限位,如图7所示,导向条112 的底面局部向上凹陷形成有凹陷部1122,凹陷部1122的纵截面呈倒v形,导向条112 的底面具有自上而下逐渐朝延伸部332倾斜的导向面,沿着凸部321的转动方向,导向面与位于延伸部332的上游的导向槽111相邻布置。且在凸部321处于第二状态下,凸部321位于凹陷部1122内。
45.本实施例中,通过向下按压按钮33推动活动件32向下运动,按钮33上设置有在凸部321处于脱离导向槽111的状态下能带动凸部321转动从而使该凸部321在第一状态和第二状态来回运动的推动部。前述的推动部为设置在按钮33底面上的凸块331,凸块331的纵截面呈倒三角形,则该凸块331的外侧面为斜面,凸块331有多个,且沿周向依次布置,从而使按钮33的底部呈波浪形,具体参见图6所示。在按钮33处于被按压的状态下,凸部321的倾斜面3211与凸块331的斜面相配合,并在凸块331的向下推动下能使凸部321沿着环壁11的周向转动,从而能位于导向槽111内或者与阻挡部相抵。
46.弹性件作用在活动件32上且在活动件32处于解锁状态下具有带动封堵件31向上运动而打开排污口103的趋势。具体地,如图4所示,弹性件为位于环壁11內腔中的弹簧9,弹簧9竖向设置在活动件32和支撑件311之间,且位于活动件32的外围。
47.上述封堵件31打开或关闭排污口的工作过程如下:
48.推动件在驱动机构的驱动下向下运动并按压按钮33,按钮33向下运动,按钮33 推动活动件32向下运动,当活动件32的凸部321向下运动至离开导向槽111时,当按钮33继续向下推动活动件32时,按钮33底部的凸块331的斜面推动活动件32之凸部 321的倾斜面3211,从而使活动件32旋转至其凸部运动至凹陷部1122内,此时,封堵件31将排污口103封堵住。
49.当推动件继续再次向下按压按钮33时,按钮33底部的凸块331的斜面推动活动件 32之对应凸部321的倾斜面3211,从使活动件32继续转动,继而使凸部321从凹陷部 1122脱离而进入下游的导向槽111内,并在弹簧9推动下具有向上运动趋势,从而将排污口103打开。
50.本实用新型所称的“流体连通”是指两个部件或部位(以下统一分别称为第一部位、第二部位)之间的空间位置关系,即流体(气体、液体或两者的混合)能从第一部位沿着流动路径流动或/和被运送到第二部位,可以是所述的第一部位、第二部位之间直接相连通,也可以是第一部位、第二部位之间通过至少一个第三者间接连通,该第三者可以是诸如管道、通道、导管、导流件、孔、槽等流体通道、也可以是允许流体流过的腔室或以上组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1