一种教学可考勤的智能一体桌椅的制作方法
1.本实用新型涉及一种桌椅,尤其涉及一种教学可考勤的智能一体桌椅。
背景技术:
2.考勤是通过某种方式来获得学生在特定场所的出勤情况,随着教育信息化工作的推进,教育领域的学校或培训机构引进了很多智能化的管理工具,但对于学生使用的桌椅还是传统的桌椅,且现有的一些考勤设备一次只能给一个人签到,很多人的时候就需要排队等待,容易耽误学生上课时间。
3.因此,根据上述出现的情况,市场上需要设计一种能方便很多人同时进行考勤和使用方便的教学可考勤的智能一体桌椅。
技术实现要素:
4.为了克服现有的一些考勤设备一次只能给一个人签到,很多人的时候就需要排队等待,容易耽误学生上课时间的缺点,本实用新型的技术问题:提供一种能方便很多人同时进行考勤和使用方便的教学可考勤的智能一体桌椅。
5.技术方案如下:一种教学可考勤的智能一体桌椅,包括有学习桌、移动块、椅子、拉动机构和回位机构,学习桌上左右两侧均滑动式设有移动块,两个移动块之间设有椅子,学习桌和移动块之间设有拉动机构,移动块和学习桌之间设有回位机构。
6.作为上述方案的改进,拉动机构包括有指纹识别器、减速电机、绕线轮、第一支撑架、第二支撑架、导线轮、拉绳、第一转轴和第二转轴,学习桌上右前侧安装有指纹识别器,学习桌上左右两侧均安装有减速电机,学习桌上后部左右两侧均设有两个第一支撑架,同侧的两个第一支撑架之间转动式设有第一转轴,第一转轴与同侧的减速电机的输出轴固定连接,第一转轴上设有绕线轮,学习桌上前部左右两侧均设有两个第二支撑架,同侧的两个第二支撑架之间转动式设有第二转轴,第二转轴上设有导线轮,绕线轮与同侧的移动块之间连接有拉绳,绕线轮上绕有拉绳,拉绳与同侧的导线轮滑动式连接。
7.作为上述方案的改进,回位机构包括有第一固定块、第二固定块、第一伸缩杆、第一弹簧和接触开关,两个移动块后侧均设有第一固定块,学习桌上前部左右两侧均设有第二固定块,第二固定块与同侧的第一固定块之间设有第一伸缩杆,第一伸缩杆上绕有第一弹簧,第一弹簧两端分别与第一固定块和第二固定块连接,学习桌上左侧设有接触开关,接触开关用于控制减速电机输出轴反向转动。
8.作为上述方案的改进,还包括有盛放机构,盛放机构包括有挡板、第二伸缩杆、第二弹簧、球块和拉动块,学习桌上右侧滑动式设有挡板,学习桌上右侧设有两个第二伸缩杆,两个第二伸缩杆上均设有球块,两个第二伸缩杆上均绕有第二弹簧,第二弹簧两端分别与学习桌和球块连接,挡板顶部前侧设有拉动块,拉动块与球块接触。
9.作为上述方案的改进,还包括有支撑机构,支撑机构包括有第三转轴、支撑板、第四转轴和抵板,学习桌上前侧转动式设有第三转轴,第三转轴上设有支撑板,学习桌上后侧
转动式设有第四转轴,第四转轴上设有抵板,抵板与支撑板接触。
10.作为上述方案的改进,还包括有控制箱,学习桌上后侧安装有控制箱,控制箱内安装有蓄电池、控制模块和电源模块,蓄电池为整个桌椅供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路、24c02电路和en25q64存储电路;两个减速电机均与控制模块通过直流电机正反转模块连接;指纹识别器和接触开关均与控制模块通过电性连接。
11.本实用新型具有以下优点:1、本实用新型通过设有拉动机构,拉动机构运转带动移动块运转,从而带动椅子运转,然后人们可坐在椅子上进行学习,实现拉动的效果;
12.2、通过设有回位机构,回位机构和拉动机构配合,人们手动按动回位机构部件,使得拉动机构运转,无需人工推动,可实现回位的效果;
13.3、通过设有盛放机构,人们推动盛放机构运转,可将物品放在盛放机构中,实现盛放的效果;
14.4、通过设有支撑机构,人们推动支撑机构运转,使得能将书本或电脑放在支撑机构部件上,实现支撑的效果。
附图说明
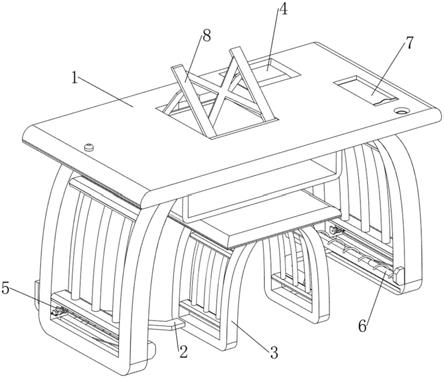
15.图1为本实用新型的立体结构示意图。
16.图2为本实用新型的拉动机构剖面立体结构示意图。
17.图3为本实用新型的回位机构立体结构示意图。
18.图4为本实用新型的盛放机构剖面立体结构示意图。
19.图5为本实用新型的支撑机构立体结构示意图。
20.图6为本实用新型的电路框图。
21.图7为本实用新型的电路原理图。
22.附图标记中:1:学习桌,2:移动块,3:椅子,4:控制箱,5:拉动机构,51:指纹识别器,52:减速电机,53:绕线轮,54:第一支撑架,55:第二支撑架,56:导线轮,57:拉绳,58:第一转轴,59:第二转轴,6:回位机构,61:第一固定块,62:第二固定块,63:第一伸缩杆,64:第一弹簧,65:接触开关,7:盛放机构,71:挡板,72:第二伸缩杆,73:第二弹簧,74:球块,75:拉动块,8:支撑机构,81:第三转轴,82:支撑板,83:第四转轴,84:抵板。
具体实施方式
23.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
24.实施例1
25.一种教学可考勤的智能一体桌椅,如图1所示,包括有学习桌1、移动块2、椅子3、拉动机构5和回位机构6,学习桌1上左右两侧均滑动式设有移动块2,两个移动块2之间设有椅子3,学习桌1和移动块2之间设有拉动机构5,移动块2和学习桌1之间设有回位机构6。
26.当人们上课需要考勤时,可使用这种教学可考勤的智能一体桌椅,人们将本桌椅
安装在地面上后,可按下电源总开关,将本桌椅上电,当需要考勤时,人们可将手指放在拉动机构5上,若拉动机构5识别到此人的指纹与拉动机构5中的额定值一致时,拉动机构5发出信号,控制模块接收到信号后控制拉动机构5运转,从而带动移动块2向前运动,进而带动椅子3向前运动,移动块2向前运动带动回位机构6运转,不需要使用本桌椅时,人们可按下回位机构6部件,回位机构6发出信号,控制模块接收到信号后控制拉动机构5反向转动,从而带动回位机构6反向运转,使得移动块2向后运动,从而使得椅子3向后运动复位,然后人们再次按下电源总开关,将本桌椅断电即可。
27.实施例2
28.在实施例1的基础之上,如图2
‑
图7所示,拉动机构5包括有指纹识别器51、减速电机52、绕线轮53、第一支撑架54、第二支撑架55、导线轮56、拉绳57、第一转轴58和第二转轴59,学习桌1上右前侧安装有指纹识别器51,学习桌1上左右两侧均安装有减速电机52,学习桌1上后部左右两侧均设有两个第一支撑架54,同侧的两个第一支撑架54之间转动式设有第一转轴58,第一转轴58与同侧的减速电机52的输出轴固定连接,第一转轴58上设有绕线轮53,学习桌1上前部左右两侧均设有两个第二支撑架55,同侧的两个第二支撑架55之间转动式设有第二转轴59,第二转轴59上设有导线轮56,绕线轮53与同侧的移动块2之间连接有拉绳57,绕线轮53上绕有拉绳57,拉绳57与同侧的导线轮56滑动式连接。
29.人们将手指放在指纹识别器51上后,当此人的指纹与指纹识别器51中的额定值一致时,指纹识别器51发出信号,控制模块接收到信号后控制减速电机52的输出轴转动,从而带动同侧的第一转轴58转动,进而带动绕线轮53转动,当绕线轮53转动时,使得拉绳57被收绕,从而使得导线轮56转动,拉绳57被收绕使得移动块2向前运动,从而使得椅子3向前运动,运行10秒后,ds1302时钟电路发出信号,控制模块接收到信号后控制减速电机52的输出轴停止转动,此时人们可坐在椅子3上,并将学习用品放在学习桌1上,若不需要使用时,可手动推动椅子3向后运动,从而带动移动块2向后运动,进而使得拉绳57被解绕,当拉绳57被解绕时,使得导线轮56反向转动,从而带动第二转轴59反向转动,同时,拉绳57使得绕线轮53反向转动,从而带动第一转轴58反向转动。
30.回位机构6包括有第一固定块61、第二固定块62、第一伸缩杆63、第一弹簧64和接触开关65,两个移动块2后侧均设有第一固定块61,学习桌1上前部左右两侧均设有第二固定块62,第二固定块62与同侧的第一固定块61之间设有第一伸缩杆63,第一伸缩杆63上绕有第一弹簧64,第一弹簧64两端分别与第一固定块61和第二固定块62连接,学习桌1上左侧设有接触开关65,接触开关65用于控制减速电机52输出轴反向转动。
31.当移动块2向前运动时,移动块2带动第一固定块61向前运动,从而使得第一伸缩杆63缩短,第一弹簧64被压缩,当人们需要不使用本桌椅时,可手动按动接触开关65,接触开关65发出信号,控制模块接收到信号后控制与停止转动状态下的减速电机52的输出轴反向转动,从而带动同侧的第一转轴58反向转动,进而带动绕线轮53反向转动,由于第一弹簧64复位带动第一伸缩杆63复位,从而带动第一固定块61向后运动,进而带动移动块2向后运动,当绕线轮53反向转动时,使得处于收绕状态下的拉绳57被解绕,从而使得导线轮56反向转动,运行10秒后,ds1302时钟电路发出信号,控制模块接收到信号后控制减速电机52的输出轴停止工作。
32.还包括有盛放机构7,盛放机构7包括有挡板71、第二伸缩杆72、第二弹簧73、球块
74和拉动块75,学习桌1上右侧滑动式设有挡板71,学习桌1上右侧设有两个第二伸缩杆72,两个第二伸缩杆72上均设有球块74,两个第二伸缩杆72上均绕有第二弹簧73,第二弹簧73两端分别与学习桌1和球块74连接,挡板71顶部前侧设有拉动块75,拉动块75与球块74接触。
33.人们可用手握着拉动块75向后运动,从而使得球块74背向运动,进而使得第二伸缩杆72缩短,第二弹簧73被压缩,拉动块75向后运动带动挡板71向后运动,能将放物口打开,人们可将一些学习用品放进去,当拉动块75向后运动不与球块74接触时,由于第二弹簧73复位带动第二伸缩杆72复位,从而带动球块74相向运动,当人们将物品放好后,可再次推动拉动块75向前运动,从而带动挡板71向前运动,当拉动块75向前运动与球块74接触时,使得球块74背向运动,而当拉动块75越过球块74时,由于第二弹簧73复位带动第二伸缩杆72复位,从而带动球块74相向运动复位。
34.还包括有支撑机构8,支撑机构8包括有第三转轴81、支撑板82、第四转轴83和抵板84,学习桌1上前侧转动式设有第三转轴81,第三转轴81上设有支撑板82,学习桌1上后侧转动式设有第四转轴83,第四转轴83上设有抵板84,抵板84与支撑板82接触。
35.初始状态下,人们可用手拉着处于水平状态下的支撑板82向前翻转,从而带动第三转轴81转动,同时拉动处于水平状态下的抵板84向后翻转,从而带动第四转轴83转动,当抵板84向后翻转时,抵板84能与支撑板82接触,从而使得抵板84能卡住支撑板82,此时人们可松开手,然后人们可将书本或是电脑放在支撑板82上,若不需要使用时,可拉动支撑板82继续向前翻转并与抵板84不接触,由于重力的原因使得抵板84向前翻转复位,从而带动第四转轴83反向,当人们松手后,由于重力原因使得支撑板82向后翻转复位,从而带动第三转轴81反向转动。
36.还包括有控制箱4,学习桌1上后侧安装有控制箱4,控制箱4内安装有蓄电池、控制模块和电源模块,蓄电池为整个桌椅供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路、24c02电路和en25q64存储电路;两个减速电机52均与控制模块通过直流电机正反转模块连接;指纹识别器51和接触开关65均与控制模块通过电性连接。
37.尽管已经参照本公开的特定示例性实施例示出并描述了本公开,但是本领域技术人员应该理解,在不背离所附权利要求及其等同物限定的本公开的精神和范围的情况下,可以对本公开进行形式和细节上的多种改变。因此,本公开的范围不应该限于上述实施例,而是应该不仅由所附权利要求来进行确定,还由所附权利要求的等同物来进行限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1