一种智能可控的连续循环作业玻璃幕墙清洗机器人装置
1.本实用新型涉及玻璃幕墙清洗设备应用技术领域,特别涉及一种智能可控的连续循环作业玻璃幕墙清洗机器人装置。
背景技术:
2.随着经济的发展,城市化规模逐渐加大,高楼建筑的玻璃幕墙逐渐增多,玻璃幕墙长时间暴露在外,不可避免会挂满尘土或污物,影响其透光效果。普通楼房的玻璃窗也要定期的清洗作业,以增强其透光性。目前针对玻璃幕墙、普通楼窗玻璃的清洗作业主要依赖人工作业,安全性较差。人工作业主要通过从楼顶挂绳的方式将作业工人悬垂在半空中清洗,工人易疲劳,影响劳动效率,且该作业危险系数极高,常常出现伤亡事故。另外,高空作业受限于天气影响较为严重。目前市面上出现了一些清洗设备,但均未得到大面积的有效应用,究其原因主要表现在:一类设备通过磁力夹持方式将两半分体设备至于玻璃两面,通过人工去移动室内一面,从而达到清洗的目的,这种设备没有从根本上解放劳动生产力,主要依靠人工作业,玻璃面积较大且位置较高时,因人手臂受限不利于清洗作业,所以只适用于小面积的局部作业。另一类设备主要从德国引进的设备,通过遥控方式驱动一个圆形机器人,在玻璃表面移动,靠吸力将设备吸在玻璃上,机器人与玻璃之间是抹布,从而将玻璃抹干净。这种设备虽然实现了遥控,但不能够有效的更换清洗抹布,导致随着擦洗的进行污物逐渐累积,最终失去了清污效果。
3.公开号为cn111956138a的一种幕墙无人机系统,通过无人机带动机架,机架上设置有推进模块和清洗模块,通过清扫辊对幕墙进行清洗,通过无人机产生向前的推力,使清扫辊始终与幕墙紧密贴靠,进而完成清洗。这种作业方式清洗效果取决于无人机,无人机连续作业受天气等影响较大,不利于大面积的灵活清洗作业,而且没能有效的解决如何连续清洗作业问题,因污物累积堵塞,将导致清洗作业无法有效开展。
4.公开号为cn111466844a的玻璃幕墙清洗机器人,解决了清洗过程中遇到障碍物可进行跨越的问题,机器人主机架的四角位置分别通过摆杆固接可调节吸盘组件,独立回转,驱动布置,从而实现清洗作业。该设计没有解决连续性清洗作业清污问题,同时通过四角旋转吸盘实现移动,机构行动不够灵活,作业面积狭小,影响作业效率。
5.所以目前急需要设计一种针对玻璃幕墙清洗的机器人装置,该装置能够实现大面积自动行走,同时自动化清洗作业,能够连续循环作业,以满足大面积玻璃幕墙或高楼窗体玻璃的清洁需求。
技术实现要素:
6.为了解决背景技术提出的技术问题,本实用新型提供一种智能可控的连续循环作业玻璃幕墙清洗机器人装置,可实现对高楼玻璃幕墙、普通楼房窗户玻璃进行智能可控的连续循环作业清洗。
7.为了达到上述目的,本实用新型采用以下技术方案实现:
8.一种智能可控的连续循环作业玻璃幕墙清洗机器人装置,包括机器人走行系统、玻璃清洗系统、智能循环水系统、智能控制系统。
9.1)所述的机器人走行系统包括工字型纵向走行机架、伺服纵向行走电机、纵向行走丝杠、纵向行走脚支、工字型横向走行机架、纵横搭接丝母、伺服横向行走电机、横向行走丝杠、横向行走脚支;
10.伺服纵向行走电机固定在工字型纵向走行机架上,带动纵向行走丝杠,纵向行走丝杠由轴承支座固连在纵向走行机架上,纵向走行机架由四组纵向行走脚支支撑在需要清洗的幕墙玻璃上;
11.工字型横向走行机架与纵向走行机架呈十字交叉,通过纵横搭接丝母相互连接;纵横搭接丝母与纵向走行机架间以滑道式导轨相互配合,同时,纵横搭接丝母与横向走行机架间也以滑道式导轨相互配合;伺服横向行走电机固定在工字型横向走行机架上,带动横向行走丝杠,横向行走丝杠通过轴承支撑在横向走行机架上,在伺服横向行走电机的带动下可自由旋转,同时,横向行走丝杠与纵横搭接丝母之间螺旋副配合,横向走行机架由四组横向行走脚支支撑。
12.进一步地,所述的纵向行走脚支由纵向行走吸盘和纵向吸盘气泵组成,纵向吸盘气泵与纵向行走吸盘连接,纵向吸盘内部均布设置有压力传感器。
13.进一步地,所述的横向行走脚支由横向行走吸盘和横向吸盘气泵组成,横向吸盘气泵与横向行走吸盘连接,横向吸盘内部均布设置有压力传感器。
14.2)所述的玻璃清洗系统包括清洗电机、清洗机构横梁、清洗偏心盘、清洗刷连杆、幕墙清洗刷进水管、幕墙清洗刷、幕墙清洗刷布、清洗导引滑槽、滑轮、清洗刷进水管路、循环水槽、清洗污水收集漏斗、污水处理桶;
15.清洗电机固定在清洗机构横梁上,清洗电机带动清洗偏心盘旋转,清洗刷连杆与清洗偏心盘形成旋转铰链;清洗刷连杆与幕墙清洗刷进水管相连,洗刷进水管与幕墙清洗刷柔性连接,幕墙清洗刷内部为空腔多孔结构,幕墙清洗刷布镶嵌在幕墙清洗刷上;清洗导引滑槽固连在横向走行机架上,幕墙清洗刷连同柔性连接的幕墙清洗刷进水管通过滑轮嵌入在清洗导引滑槽内部,可上下自由滑动;清洗刷进水管路一端与幕墙清洗刷进水管相连通,另一端插入在循环水槽中;清洗污水收集漏斗与横向走行机架固连,始终处于幕墙清洗刷正下方并与被清洗幕墙紧贴在一起,将清洗污水收集到位于其正下方的污水处理桶内,污水处理桶与清洗污水收集漏斗通过智能卡紧开关连接。
16.进一步地,所述的污水处理桶设置有污水过滤网、污物挡槽、循环水槽,污水过滤网将清洗下来的固体污物过滤出来存留在污物挡槽中,经过滤的水进入到污水处理桶下部的循环水槽中。
17.3)所述的智能循环水系统包括进水管、水位监测器、循环水泵、清洗水管;
18.进水管与污水处理桶相连通,并通过水管固定夹将水管固定在横向走行机架和清洗污水收集漏斗侧面,通过水位监测器监测并控制污水处理桶中的水位,水位过高或过低自动报警;污水处理桶中放置循环水泵,循环水泵与清洗水管连通,并经过清洗刷进水管路将水供给到幕墙清洗刷布中,对玻璃幕墙带水冲刷清洗。
19.4)所述的智能控制系统包括plc控制器及外接电线;伺服纵向行走电机、伺服横向行走电机、纵向行走脚支与横向行走脚支的吸盘气泵、清洗电机、循环水泵均通外接电线与
plc控制器电气连接;清洗机器人的走行过程、清洗过程、污水过滤循环均通过plc控制器控制各个电机的动作。
20.与现有技术相比,本实用新型的有益效果是:
21.(1)通过巧妙设计,实现一种智能可控的连续循环作业玻璃幕墙清洗机器人装置与方法,该设备实现对高空玻璃幕墙的连续循环作业清洗。通过“工字型”横、纵向行走架间相互配合,实现横向、纵向连续行走;
22.(2)行走过程中通过吸盘气泵顺序调节吸盘内压力,配合横、纵向行走动作,同时吸盘可轴向移动,实现具有一定不平度的平面玻璃幕墙的跨越;
23.(3)设计有曲柄滑块机构带动清洗刷头循环往复动作,对玻璃幕墙清洗,通过循环水带压冲洗刷布,防止清洗刷布因长时间清污而导致固体污物沉积,有效解决并保障了连续清洗作业;
24.(4)污水收集系统可对清洗污水进行过滤,循环使用;
25.(5)通过智能循环水系统,保证更长期有效的大面积清洗作业;
26.(6)整个清洗过程智能可控,协调连续作业。
附图说明
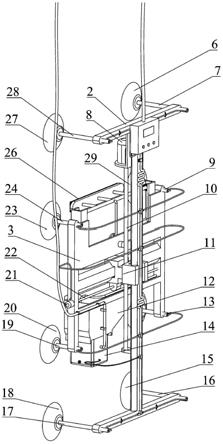
27.图1为本实用新型的玻璃幕墙清洗机器人装配图i;
28.图2为本实用新型的玻璃幕墙清洗机器人整体装配图ii;
29.图3为本实用新型的玻璃幕墙清洗机器人清洗机构与污水收集系统图;
30.图4为本实用新型的玻璃幕墙清洗机器人污水处理桶剖视图;
31.图5为本实用新型的玻璃幕墙清洗机器人污水槽俯视图;
32.图6为本实用新型的玻璃幕墙清洗机器人整体左视图;
33.图7为本实用新型的玻璃幕墙清洗机器人的电气控制系统接线图。
34.图中:1
‑
幕墙玻璃 2
‑
纵向走行机架 3
‑
横向走行机架 4
‑
进水管 5
‑
plc控制箱 6
‑
纵向行走吸盘 i7
‑
纵向吸盘i气泵 8
‑
纵向行走电机 9
‑
横向吸盘i气泵 10
‑
纵向行走丝杠 11
‑
纵横搭接丝母 12
‑
清洗污水收集漏斗 13
‑
横向吸盘ii气泵 14
‑
污水处理桶 15
‑
纵向行走吸盘ii 16
‑
纵向吸盘ii气泵 17
‑
纵向吸盘iii气泵 18
‑
纵向行走吸盘iii 19
‑
横向吸盘iii气泵 20
‑
横向行走吸盘iii 21
‑
横向行走电机 22
‑
横向行走丝杠 23
‑
横向行走吸盘iv 24
‑
横向吸盘iv气泵 25
‑
清洗电机 26
‑
幕墙清洗刷 27
‑
纵向行走吸盘iv 28
‑
纵向吸盘iv气泵 29
‑
横向行走吸盘i 30
‑
清洗刷连杆 31
‑
清洗机构横梁 32
‑
横向行走吸盘ii 33
‑
压力传感器 34
‑
清洗水管 35
‑
清洗偏心盘 36
‑
清洗刷进水管路 37
‑
幕墙清洗刷布 38
‑
清洗导引滑槽 39
‑
滑轮 40
‑
幕墙清洗刷进水管 41
‑
污水过滤网 42
‑
污物挡槽 43
‑
循环水槽 44
‑
外接电线 45
‑
电线一 46
‑
电线二 47
‑
电线三 48
‑
电线四 49
‑
电线五 50
‑
电线六 51
‑
电线七 52.电线八 53
‑
电线九 54
‑
电线十 55
‑
电线十一 56
‑
电线十二 57
‑
分线头 58
‑
线卡 59
‑
水位监测器 60
‑
循环水泵 61
‑
水管固定夹。
具体实施方式
35.以下结合附图对本实用新型提供的具体实施方式进行详细说明。
36.如图1
‑
7所示,一种智能可控的连续循环作业玻璃幕墙清洗机器人装置,包括机器
人走行系统、玻璃清洗系统、智能循环水系统、智能控制系统。
37.1)所述的机器人走行系统包括工字型纵向走行机架2、伺服纵向行走电机8、纵向行走丝杠10、纵向行走脚支、工字型横向走行机架3、纵横搭接丝母11、伺服横向行走电机21、横向行走丝杠22、横向行走脚支。
38.所述的机器人走行系统由伺服纵向行走电机8固定在工字型纵向走行机架2上,带动纵向行走丝杠10,纵向行走丝杠10由两个轴承支座固连在纵向走行机架2上,纵向走行机架2由四组纵向行走脚支支撑在需要清洗的幕墙玻璃1上,每组纵向行走脚支由纵向行走吸盘和纵向吸盘气泵组成,组成四个脚支的四个吸盘分别为6纵向行走吸盘i、15纵向行走吸盘ii、18纵向行走吸盘iii、27纵向行走吸盘iv,组成四个脚支的纵向吸盘气泵分别为纵向吸盘i气泵7、纵向吸盘ii气泵16、纵向吸盘iii气泵17、纵向吸盘iv气泵28组成。
39.工字型横向走行机架3与纵向走行机架2呈十字交叉,通过纵横搭接丝母11相互连接。纵横搭接丝母11与纵向走行机架2间以滑道式导轨相互配合,同时,纵横搭接丝母11与横向走行机架3间也以滑道式导轨相互配合。由伺服横向行走电机21固定在“工字型”横向走行机架3上,带动横向行走丝杠22,横向行走丝杠22通过轴承支撑在横向走行机架3上,在伺服横向行走电机21带动下旋转,同时,横向行走丝杠22与纵横搭接丝母11之间螺旋副配合。横向走行机架3由四组脚支支撑,每组脚支由纵向行走吸盘和纵向吸盘气泵组成,组成四个脚支的四个吸盘分别为29横向行走吸盘i、32横向行走吸盘ii、20横向行走吸盘iii、23横向行走吸盘iv,组成四个脚支的横向吸盘气泵分别为横向吸盘i气泵9、横向吸盘ii气泵13、横向吸盘iii气泵19、横向吸盘iv气泵24组成。纵向和横向吸盘内部设置均布有压力传感器33。
40.2)所述的玻璃清洗系统包括清洗电机25、清洗机构横梁31、清洗偏心盘35、清洗刷连杆30、幕墙清洗刷进水管40、幕墙清洗刷26、幕墙清洗刷布37、清洗导引滑槽38、滑轮39、清洗刷进水管路40、循环水槽43、清洗污水收集漏斗12、污水处理桶14。
41.清洗电机25固定在清洗机构横梁31上,清洗电机25带动清洗偏心盘35旋转,清洗刷连杆30与清洗偏心盘35形成旋转铰链,清洗刷连杆30与幕墙清洗刷进水管40相连,洗刷进水管40与幕墙清洗刷26柔性连接,幕墙清洗刷26内部为空腔多孔结构,幕墙清洗刷布37镶嵌在幕墙清洗刷26上,清洗导引滑槽38固连在横向走行机架3上,幕墙清洗刷26连同柔性连接的幕墙清洗刷进水管40通过滑轮39嵌入在清洗导引滑槽38内部,可上下自由滑动。清洗刷进水管路36一端与幕墙清洗刷进水管40相连通,另一端插入在循环水槽43中。清洗污水收集漏斗12与横向走行机架3固连,始终处于幕墙清洗刷26正下方,并保证与被清洗幕墙紧密贴紧,将清洗污水收集到位于其正下方的污水处理桶14内,污水处理桶14与清洗污水收集漏斗12通过智能卡紧开关连接,污水处理桶设置有污水过滤网41,将清洗下来的固体污物过滤出来存留在污物挡槽42中,经过滤的水进入到污水处理桶14下部的循环水槽43中。进水管路36插入在循环水槽43中,通过循环泵60循环抽吸利用。
42.3)所述的智能循环水系统包括进水管4、水位监测器59、循环水泵60、清洗水管34。
43.进水管4与污水处理桶14相连通,并通过水管固定夹61将水管固定在横向走行机架3和清洗污水收集漏斗12侧面,通过水位监测器59监测并控制污水处理桶14中的水位,水位过高或过低会自动报警。污水处理桶14中放置循环水泵60与清洗水管34连通,并经过清洗刷进水管路36将水供给到幕墙清洗刷布37中,对玻璃幕墙带水冲刷清洗。
44.4)所述的智能控制系统包括plc控制器(plc控制箱5内)和外接电线44,电气接线图见图7。
45.清洗机器人的走行过程、清洗过程、污水过滤循环均通过plc控制箱5控制各个伺服电机的动作,外接电线44连接plc控制箱5来形成智能的控制系统。从plc控制箱5输出电线一45作为机器人主路线,通过电线二46连接纵向吸盘i气泵7,电线三47连接纵向吸盘iv气泵28,电线四48连接横向吸盘iv气泵24,电线五49连接横向吸盘i气泵9,电线六50连接横向行走电机21,电线七51连接清洗电机25,电线八52连接横向吸盘iii气泵19,电线九53连接横向吸盘ii气泵13,电线十连接循环水泵60,电线十一55连接纵向吸盘iii气泵17,电线十二56连接纵向吸盘ii气泵16,地面人员可通过遥控器给设备发送控制信号,实现整个循环过程的协调有序完成。
46.本实用新型的连续循环作业玻璃幕墙清洗机器人装置的清洗过程如下:
47.1)先将清洗机器人装置放置到需要清洗的玻璃幕墙位置,通过悬垂的水管和电线给清洗机器人供水和电,使横向四个吸盘与纵向四个吸盘与玻璃幕墙接触,由plc控制箱5给出控制信号,分别启动纵向四组脚支的纵向吸盘气泵:纵向吸盘i气泵7、纵向吸盘ii气泵16、纵向吸盘iii气泵17、纵向吸盘iv气泵28,将纵向四组脚支吸盘(6纵向行走吸盘i、15纵向行走吸盘ii、18纵向行走吸盘iii、27纵向行走吸盘iv)吸附在幕墙玻璃1上。同时由plc控制箱5对横向吸盘气泵(横向吸盘i气泵9、横向吸盘ii气泵13、横向吸盘iii气泵19、横向吸盘iv气泵24)给出控制信号,调整横向行走吸盘(29横向行走吸盘i、32横向行走吸盘ii、20横向行走吸盘iii、23横向行走吸盘iv)吸附在幕墙玻璃1上。
48.2)开始启动玻璃幕墙的清洗作业,plc控制箱5对横向吸盘气泵(横向吸盘i气泵9、横向吸盘ii气泵13、横向吸盘iii气泵19、横向吸盘iv气泵24)给出控制信号,调整横向行走吸盘(29横向行走吸盘i、32横向行走吸盘ii、20横向行走吸盘iii、23横向行走吸盘iv)与幕墙玻璃1脱离吸附力,通过横向吸盘内部设置的压力传感器33检测压力信号。这时整体机器人系统主要靠纵向四组脚支吸盘吸附在玻璃幕墙上。同时,开启清洗机构横梁31上的清洗电机25,带动清洗偏心盘35旋转,通过铰链带动清洗刷连杆30运动,从而带动幕墙清洗刷进水管40与幕墙清洗刷26运动,幕墙清洗刷26通过滑轮39嵌入在清洗导引滑槽38内部,上下自由滑动,从而带动幕墙清洗刷布37对玻璃慕强进行清污作业。同时,清洗刷进水管路36一端与幕墙清洗刷进水管40相通,另一端插入在循环水槽43中,通过循环泵循环抽吸利用。将循环水不停的喷射到幕墙清洗刷26内部的空腔多孔结构中,对幕墙清洗刷布37进行不停的清洗,有利于更好的将玻璃幕墙上的污渍清洗干净,清洗污水收集漏斗12固连在横向走行机架3上,处于幕墙清洗刷26正下方,将清洗污水收集到位于其正下方的污水处理桶14内,污水处理桶14与清洗污水收集漏斗12通过智能卡紧开关连接,污水处理桶设置有污水过滤网41,将清洗下来的固体污物过滤出来存留在污物挡槽42中,经过滤的水进入到污水处理桶14下部的循环水槽43中。
49.由plc控制箱5启动固定在工字型纵向走行机架2上的伺服纵向行走电机8,带动纵向行走丝杠10旋转,使纵横搭接丝母11沿着固定的工字型纵向走行机架2纵向移动,保证清洗机构完成纵向矩形面积玻璃幕墙的清洗作业。待该部分清洗完成后,由plc控制箱5启动固定在工字型横向走行机架3上的伺服横向行走电机21,带动横向行走丝杠22,使纵横搭接丝母11左、右横向移动,从而实现横向矩形面积玻璃幕墙的清洗作业。
50.无论是横向清洗还是纵向清洗作业,当遇到顽固污渍时,可由plc控制箱5控制伺服纵向行走电机8、伺服横向行走电机21停止运转,固定在某个需要清洗的位置,由清洗机构反复对该部位进行清洗作业,直到清洗干净为止。
51.纵向行走清洗过程:由plc控制箱5启动伺服纵向行走电机8,带动纵向行走丝杠10旋转,使纵横搭接丝母11沿着固定的工字型纵向走行机架2纵向移动,直到移动到纵向走行机架2最上端。由plc控制箱5对横向吸盘气泵(横向吸盘i气泵9、横向吸盘ii气泵13、横向吸盘iii气泵19、横向吸盘iv气泵24)给出控制信号,调整横向行走吸盘(29横向行走吸盘i、32横向行走吸盘ii、20横向行走吸盘iii、23横向行走吸盘iv)与幕墙玻璃1产生吸附力,通过横向吸盘内部设置的压力传感器33检测压力信号。由plc控制箱5使纵向四组脚支吸盘脱离玻璃幕墙,这时整体机器人主要靠横向四组脚支吸盘吸附在玻璃幕墙上。由plc控制箱5控制伺服纵向行走电机8,带动纵向行走丝杠10旋转,使工字型纵向走行机架2相对于纵横搭接丝母11纵向移动,从而完成纵向行走过程,该过程中清洗机构一直在完成清洗作业。当工字型纵向走行机架2向上纵向行走到最大位置时,由plc控制箱5使纵向四组脚支吸盘吸附玻璃幕墙,横向四组脚支吸盘脱离幕墙,重复以前的清洗动作完成一定矩形面积内玻璃幕墙的清洗作业。同理可实现横向移动清洗作业过程。
52.以上实施例在以本实用新型技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于上述的实施例。上述实施例中所用方法如无特别说明均为常规方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1