开关门机构、箱体和清洁机器人的制作方法
1.本实用新型涉及到地面清洁领域,特别是涉及到一种开关门机构、箱体和清洁机器人。
背景技术:
2.随着科技的发展,清洁机器人越来越受到人们的喜爱。商用的清洁机器人通常用于商场、医院等场所的清洁工作。清洁机器人内部需要更换模块时,需要人工干预,比如用螺丝刀拆卸外壳,再更换内部模块。该方式,不仅需要耗费用户的时间,而且还容易造成清洁机器人结构的损坏,给用户造成不便。
技术实现要素:
3.本实用新型的主要目的为提供一种开关门机构,旨在解决清洁机器人更换内部模块不方便的技术问题。
4.本实用新型提供一种开关门机构,包括门体、推杆、齿条和齿轮组件;
5.门体包括门轴、门板、门轴齿轮和铰接件;
6.门轴通过铰接件固定于箱体上,铰接件与门板固定连接,门轴齿轮与门轴固定连接;
7.推杆固定于箱体上,推杆的伸缩杆与齿条固定连接;
8.推杆、齿条、齿轮组件与门轴齿轮、门轴依次传动连接,以驱动门板旋转。
9.优选的,开关门机构还包括限位部,限位部与齿条相对设置;
10.限位部包括滑轨和滑动件;
11.齿条与滑动件连接,滑动件与滑轨滑动连接,其中,滑轨固定于箱体上。
12.优选的,开关门机构还包括感应部,感应部用于识别滑动件的行程,并及时促使推杆停止运动。
13.优选的,感应部包括接触开关,接触开关设置于限位部;
14.接触开关位于滑动件上方,固定于滑轨的顶部;
15.接触开关具有一拨片,拨片位于滑动件的行程内,拨片可抵顶于滑动件的顶部。
16.优选的,滑动件的两端分别设置至少一接触开关。
17.优选的,感应部还包括角速度传感器,角速度传感器连接于门轴,以采集门轴的旋转行程,及时促使推杆停止运动。
18.优选的,门板远离外部的一端面设有加强筋。
19.优选的,门轴包括主轴和副轴;
20.门轴齿轮固定于主轴,主轴与副轴固定连接;
21.门轴齿轮与主轴传动连接,以驱动副轴旋转。
22.本实用新型提供一种箱体,包含上述的开关门机构。
23.本实用新型提供一种清洁机器人,包含上述的箱体。
24.本实用新型的有益效果在于:通过开关门机构,设备需要更换内部模块时可实现自动开关门,无需人工干预,避免人工拆卸外壳造成清洁机器人结构的损坏。
附图说明
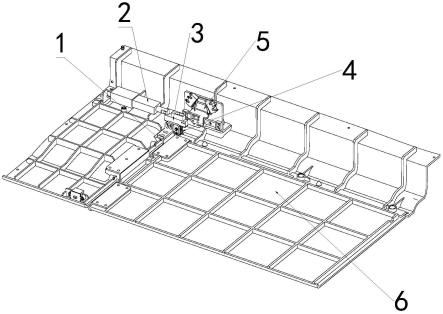
25.图1为本实用新型一种开关门机构一实施例的第一结构示意图;
26.图2为本实用新型一种开关门机构一实施例的第二结构示意图;
27.图3为图2中的局部放大示意图;
28.图4为图1中限位开关工作示意图;
29.图5为图1中开关门机构的门体的结构示意图。
30.标号说明:
31.1、门体;11、门轴;12、门板;13、门轴齿轮;14、铰接件;
32.2、推杆;3、齿条;4、齿轮组件;
33.5、限位部;51、滑轨;52、滑动件;53、连接件;54、限位开关;55、拨片;
34.6、箱体。
35.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
36.应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
37.参照图1至3和图5,本实用新型提供一种开关门机构,包括门体1、推杆2、齿条3和齿轮组件4;
38.门体1包括门轴11、门板12、门轴齿轮13和铰接件14;
39.门轴11通过铰接件14固定于箱体6上,铰接件14与门板12固定连接,门轴齿轮13与门轴11固定连接;
40.推杆2固定于箱体6上,推杆2的伸缩杆与齿条3固定连接;
41.推杆2、齿条3、齿轮组件4与门轴齿轮13、门轴14依次传动连接,以驱动门板12旋转。
42.在本实用新型实施例中,开关门机构,包括门体1、推杆2、齿条3和齿轮组件4。门轴11通过铰接件14固定于箱体6上,铰接件14与门板12固定连接,门轴齿轮13与门轴11固定连接,从而实现门轴11驱动门板12转动。推杆2固定于箱体6上,推杆2的伸缩杆与齿条3固定连接。本技术的传动过程为推杆2推动齿条3转动,齿条3与齿轮组件4和门轴齿轮13依次啮合连接,从而驱动门轴11转动,由于门板12固定在门轴11上,最终驱动门板12朝设备外部或内部方向旋转。通过上述设置,设备需要更换内部模块时可实现自动开关门,无需人工干预,避免人工拆卸外壳造成清洁机器人结构的损坏。
43.参照图1至3,开关门机构还包括限位部5,限位部5与齿条3相对设置;
44.限位部5包括滑轨51和滑动件52;
45.齿条3与滑动件52连接,滑动件52与滑轨51滑动连接,其中,滑轨51固定于箱体6上。
46.在本实用新型实施例中,开关门机构还包括限位部5,限位部5与齿条3相对设置,
限位部5的作用是对齿条3做限位用。通过齿轮组件4的安装板以及限位部5的限位下,使得齿条3仅能做前后移动,仅有前后这一自由度。具体的,连接件53一端连接齿条3,另一端连接滑动件52,滑动件52与滑轨51滑动连接,在滑轨51上滑动。滑轨51的存在,使得限位部5跟随齿条3的运动,并对齿条3一直做限位。
47.进一步地,开关门机构还包括感应部,感应部用于识别滑动件52的行程,并及时促使推杆2停止运动。
48.在本实用新型实施例中,感应部用于识别滑动件52的行程。具体的,当开关门机构开门时,推杆2会伸出,带动滑动件52前行,感应部识别滑动件52的前行距离。当滑动件52的前行距离超过阈值时,感应部促使推杆2停止伸出,避免门体1开门时旋转过度。当开关门机构关门时,推杆2会缩回,带动滑动件52后退,感应部识别滑动件52的后退距离,当滑动件52的后退距离超过阈值时,感应部促使推杆2停止运动,避免门体1关门时旋转过度,碰到设备内部元件。
49.参照图3和4,感应部包括接触开关54,接触开关54设置于限位部5;
50.接触开关54位于滑动件上方,固定于滑轨51的顶部;
51.接触开关54具有一拨片55,拨片55位于滑动件52的行程内,拨片55可抵顶于滑动件52的顶部。
52.在本实用新型实施例中,感应部包括接触开关54,接触开关54设置于限位部5。接触开关54的具有一拨片55。拨片55位于滑动件52的行程内。拨片55可抵顶于滑动件52的顶部,如图4中虚线所示,拨片55抵顶于滑动件52的顶部。拨片55受滑动件52挤压到一定程度时,拨片开关54会开启,使得推杆2停止运动,避免门板12过度旋转。
53.参照图3和4,接触开关54包括第一接触开关和第二接触开关;
54.第一接触开关的第一拨片和第二接触开关的第二拨片分别位于滑动件52的两端。
55.在本实用新型实施中,第一接触开关用于避免开关门机构过度开门,第二接触开关用于避免开关门机构过度关门。具体的,在开关门机构开门时,推杆1伸出,带动滑动件52朝远离齿轮组件4的方向移动,第一接触开关的第一拨片与滑动件52的关系是从不接触、抵顶到挤压。挤压到一定程度时,第一接触开关开启工作,使得推杆1停止伸出,避免门板12过度朝外旋转。同理的,在开关门机构关门时,推杆1缩回,使得滑动件52朝靠近齿轮组件4的方向移动。第二接触开关的第二拨片与滑动件的关系是从不接触、抵顶到挤压。挤压到一定程度时,第二接触开关开启工作,使得推杆1停止缩回,避免门板12过度朝内旋转。
56.进一步地,感应部还包括角速度传感器,角速度传感器连接于门轴11,以采集门轴11的旋转行程,及时促使推杆2停止运动。
57.在本实用新型实施例中,感应部还包括角速度传感器,角速度传感器连接于门轴11,以采集门轴11的旋转行程和方向,可根据旋转行程计算滑动件52的运动方向和滑动距离。当滑动件52的滑动距离超过阈值时,推杆2停止运动,避免门板12过度旋转,造成设备的损坏。
58.参照图5,齿轮组件4包括从动齿轮;
59.从动齿轮与门轴齿轮13为相同规格的齿轮。
60.在本实用新型实施例中,从动齿轮与门轴齿轮13为相同规格的齿轮,相比于传统的通过大小齿轮配合,同规格的齿轮使得开关门机构整体体积更小,安装在设备上时,齿轮
组件4不会突出设备的外壳。
61.进一步地,门板52远离外部的一端面设有加强筋。
62.在本实用新型实施例中,门板52远离外部的一端面设有加强筋,能加强门板52的刚性。
63.在本技术一实施例中,门轴11为一条整轴,门轴齿轮13与门轴11整体传动连接。具体的,门轴齿轮13设置于门轴11顶端,门轴11上设置有多个铰接件,各铰接件之间通过连接件固定。将门轴11整体固定在箱体6上。通过推杆2、齿条3、齿轮组件4和门轴齿轮13依次传动连接,带动门轴11旋转,从而带动门板12旋转。
64.在本技术另一实施例中,门轴11包括主轴和副轴。门轴齿轮13固定于主轴,主轴与副轴固定连接。门轴齿轮13与主轴传动连接,以驱动副轴旋转。
65.进一步地,本技术提供一种箱体,包含上述的开关门机构。
66.在本实用新型实施例中,箱体6具有开关门机构,实现自动开关门,方便用户更换箱体6内部的零件。
67.进一步地,本实用新型还提供一种清洁机器人,包含上述的箱体6。
68.在本实用新型实施例中,清洁机器人能自动开关箱体上的门,方便用户更换箱体6内部的零件。
69.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1