一种翻转煎烤机器人夹具及翻转煎烤机器人的制作方法
1.本实用新型涉及自动化烹饪设备技术领域,尤其涉及一种翻转煎烤机器人夹具及翻转煎烤机器人。
背景技术:
2.在各种自动化烹饪设备中,由于煎烤烹饪过程相对比较简单,而且翻转煎烤机器人能够准确控制煎烤温度、精确掌握煎烤时间、并能辅以测量手段控制成品质量,用煎烤机器人进行肉饼、肉排等煎烤食品的加工可以取得很好的效果。
3.现有技术对煎烤食品进行翻转时多采用煎铲将煎烤食品铲起并夹紧,经旋转翻面后再放置于煎台进行另一面的煎烤。例如公告号为cn210138086u的实用新型专利提供了一种自动煎制烹饪铲,通过上铲和下铲完成铲和夹的动作,再通过机器人完成翻面的动作。
4.但是上述技术方案还存在以下不足:
5.1.铲取煎烤食品时没有对煎烤食品进行定位、或者需要其他辅助装置辅助定位,食品容易在铲取过程中发生移动,严重时可使食品发生破裂;
6.2.需要夹紧食品后才能移动和翻面,夹紧力过小则食品容易滑出掉落、夹紧力过大又容易使食品变形或破裂;同时悬臂状的夹铲的夹紧力分布不均、不易控制,造成装置可靠性低、品控难度大;同时移动和翻转速度不能太快、生产率较低;
7.3.放置翻面后的煎烤食品时难以将食品准确放置至目标位置,在面积有限的煎台上难以同时进行多个食品的煎烤。
技术实现要素:
8.针对现有技术存在的以上缺陷,本实用新型提供了一种能可靠地完成夹取、翻转动作,能准确地将翻面后的煎烤食品放置至目标位置的翻转煎烤机器人夹具,以及应用了上述翻转煎烤机器人夹具、并能快速更换夹具的翻转煎烤机器人。
9.本技术提供的翻转煎烤机器人夹具包括安装座、夹爪、以及水平对称设置的第一夹持件和第二夹持件;所述夹爪固定至所述安装座;所述第一夹持件为一扁平盒状容器的一半或小于一半、开口平齐设置,所述盒状容器水平截面轮廓与所述煎烤食品匹配、内部高度不小于所述煎烤食品;所述第一夹持件和所述第二夹持件开口相对地连接至所述夹爪的运动部件、构成钳状机构,所述运动部件用于使所述第一夹持件和所述第二夹持件相向移动或转动至闭合位置、相背移动或转动至打开位置。
10.实际应用时,机器人将打开状态的第一夹持件和第二夹持件置于煎烤食品两侧并贴紧煎台,然后控制夹爪将夹具闭合,在闭合过程中将煎烤食品夹取至第一夹持件和第二夹持件构成的扁平盒状容器内。在移动和翻转煎烤食品的过程中,夹爪保持闭合,即可实现快速移动和翻转而不必担心煎烤食品滑出。将食品翻转和/或移动至目标位置后,控制夹爪打开即可将食品准确放置。
11.优选地,所述夹爪为气动手指或电动手指、包括本体和平行或y形设置的第一夹指
和第二夹指;所述第一夹持件固定连接至所述第一夹指,所述第二夹持件固定连接至所述第二夹指。夹爪可以选用各种现有技术,但选用气动手指或电动手指等标准件时,结构紧凑、易于集成。采用平行设置的夹指适用方形或较狭长食品的夹取,所需工作空间较小;采用y形设置的夹指适用圆形或尺寸较大的食品的夹取。
12.优选地,所述盒状容器的水平截面呈圆形或多边形或椭圆形或腰圆形;在所述闭合位置,所述第一夹持件与所述第二夹持件吻合或相互之间留有间隙;所述安装座上设置有限位件,用于限制所述第一夹指和所述第二夹指的开度。可根据常见的煎烤食品设计多种形状与之匹配的夹持件,以便在夹取后防止食品在夹持件内移动,同时夹取时占用尽量小的工作空间。夹持件之间吻合闭合时可以防止食品碎片掉落,可用于需要将食品移动至其他工位的应用场景;夹持件之间留有间隙时可以降低零件的尺寸公差要求和匹配要求,降低制造成本且对夹具功能影响很小。
13.优选地,所述盒状容器呈扁圆柱形,所述第一夹持件和所述第二夹持件为所述盒状容器的一半;所述第一夹持件的开口下端设置有底部水平的刃状边缘,所述第一夹持件的上端面中心设置有半圆形的观察孔,所述第二夹持件对称设置。所述安装座包括可拆卸的保护罩,用于保护所述夹爪的本体。圆形煎烤食品的种类最多,如各种饼类,特别是用于汉堡包的肉饼,用量较大,适合进行自动煎烤。夹持件开口下端设置的刃状边缘有利于食品的顺利夹取、防止夹持件损坏食品;观察孔可用于观察或者测量。
14.优选地,所述第一夹持件包括第一连接部、用于连接至所述第一夹指、使所述第一夹持件除所述第一连接部外整体低于所述夹爪底部;所述第二夹持件对称设置有第二连接部。为了夹取煎台中部的食品,需要使夹持件位于最低位置,避免其他部件与煎台和其他食品干涉,同时在需要将夹持件打开至较大开度时,也需将夹持件设置于夹爪下方,以避免夹持件外侧与夹爪干涉。
15.优选地,所述翻转煎烤机器人夹具还包括导向件、用于在夹取和放置所述煎烤食品时限制其移动;所述导向件包括导向头和第三连接部,所述第三连接部固定连接至所述安装座;在所述闭合位置,所述导向头位于所述第一夹持件和所述第二夹持件内部;在所述闭合位置,所述第一连接部和所述第二连接部之间在水平方向留有间隙、所述第一夹持件的侧壁和所述第二夹持件的侧壁匹配所述间隙留有缺口,所述间隙和所述缺口用于所述第三连接部穿设固定至所述安装座。
16.导向件在夹取食品时将食品限位,使夹持件夹取食品时食品保持不动,避免食品被铲取时发生随机移动而发生损坏;在放置食品时,导向件可在夹持件打开时保持食品的位置,使放置位置更加准确,同时避免食品粘连至一侧的夹持件而发生不希望出现的移位甚至翻转。
17.优选地,所述导向头包括对称设置的、呈竖直薄片状的左导向部和右导向部,用于对所述煎烤食品围合限位;所述第三连接部包括对称设置的左连接部和右连接部、分别将所述左导向部和所述右导向部连接至所述安装座、使所述导向件构成固定设置的夹钳状结构。
18.将导向件分成两部分设置时便于零件加工,仅需折弯或冲压而不需要焊接等工序。
19.优选地,所述导向头由竖直设置的薄片围合成与所述煎烤食品轮廓匹配的圆环或
椭圆环或腰圆环或多边形框、与所述第三连接部构成球拍状结构;所述导向头的高度小于所述第一夹持件和所述第二夹持件的内部高度。闭合设置的导向头强度更高,可以采用较薄的材料。
20.本技术提供的翻转煎烤机器人用于夹取、翻转煎烤食品,包括机械臂和前述的翻转煎烤机器人夹具;所述翻转煎烤机器人夹具连接至所述机械臂;所述机械臂用于移动、翻转所述翻转煎烤机器人夹具。
21.优选地,所述翻转煎烤机器人夹具通过快换模块连接至所述机械臂;所述安装座固定至所述快换模块,并使所述第一夹持件底部和所述第二夹持件底部不高于所述快换模块最低位置。
22.借助机械臂和本技术提供的夹具可以完成准确、快速的夹取、移动和翻转动作,同时通过煎台温度控制、实时测量、准确计时等手段,可保质保量地同时煎烤多个食品,发挥自动化烹饪设备的优势。
23.本实用新型的技术效果在于:
24.1.在夹取食品的过程中能将食品可靠定位,防止夹取过程中食品发生移动或破裂;
25.2.在移动和翻转食品的过程中确保食品不会掉落,可以实现快速移动和翻转;
26.3.在夹取和翻转过程中夹具对食品施加的影响达到最小,保证食品的外形和质量;
27.4.可以准确将翻转后的食品放置到目标位置,结合能够快速更换夹具的机器人,可以实现在有限尺寸的煎台上或者多个煎台上进行多个食品、多种形状食品的同时煎烤、分时翻转。
附图说明
28.下面结合附图和具体实施方式对本实用新型作进一步详细说明:
29.图1是实施例一的翻转煎烤机器人夹具透视图;
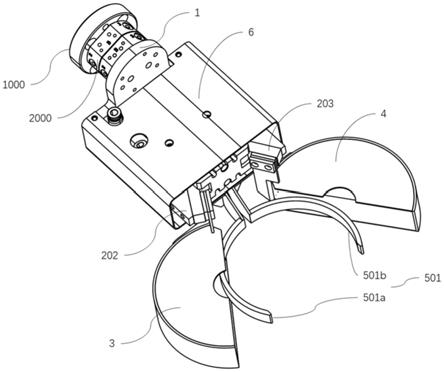
30.图2是实施例二的翻转煎烤机器人夹具透视图;
31.图3是实施例二的翻转煎烤机器人夹具俯视图;
32.图4是实施例二的闭合状态透视图(保护罩未示出);
33.图5是实施例二的第二夹持件透视图;
34.图6是实施例二的导向件透视图;
35.图7是实施例三的翻转煎烤机器人夹具透视图;
36.图8是实施例三的一种变化方式俯视图;
37.图9是实施例三的一种变化方式透视图;
38.图10是实施例三的一种变化方式透视图;
39.图11是实施例四的翻转煎烤机器人透视图;
40.附图标号说明:
41.1.安装座,2.夹爪,3.第一夹持件,4.第二夹持件,5.导向件,6.保护罩,7.限位件,201.本体,202.第一夹指,203.第二夹指,401.刃状边缘,402.第二连接部,403.观察孔,404.侧壁,405.加强筋,406.缺口,501.导向头,501a.左导向部,501b.右导向部,502.第三
连接部,502a.左连接部,502b.右连接部,1000.机械臂,2000.快换模块。
具体实施方式
42.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对照附图说明本实用新型的具体实施方式。为使图面简洁,各图中只示意性地表示出了与实用新型相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
43.还应当进一步理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。在本文中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
44.实施例一:一种翻转煎烤机器人夹具。
45.如图1所示,本实施例的翻转煎烤机器人夹具包括安装座1、夹爪2、用于保护夹爪2本体的保护罩6以及水平对称设置的第一夹持件3和第二夹持件4;夹爪2为气动手指标准模块、和保护罩6均固定连接至安装座1;第一夹持件3为一外径134mm、壁厚2mm、高30mm的扁平圆柱盒状容器的一半、开口平齐设置,和对称设置的第二夹持件4配合,用于夹取煎烤食品,例如汉堡包用的煎烤肉饼。所述盒状容器水平截面轮廓与煎烤肉饼匹配、内部高度不小于煎烤肉饼。如图4所示,夹爪2包括本体201和y形设置的第一夹指202和第二夹指203;第一夹持件3固定连接至第一夹指202、第二夹持件4固定连接至第二夹指203、构成钳状机构。夹爪2动作时,可将第一夹持件1和第二夹持件2相向转动至闭合位置、或相背转动至打开位置。
46.如图4所示,位于闭合位置时,第一夹持件3和第二夹持件4的内部构成盒状空间,可用于夹取直径100mm左右的肉饼。实际应用时,需将夹具安装至煎烤用的机器人,机器人将打开状态的第一夹持件3和第二夹持件4置于肉饼两侧并贴紧煎台,然后控制夹爪2将夹具闭合,在闭合过程中将肉饼夹取至第一夹持件3和第二夹持件4构成的扁平盒状容器内。在移动和翻转肉饼的过程中,夹爪2保持闭合,即使在快速移动和翻转过程中也不必担肉饼滑出。将肉饼翻转和/或移动至目标位置后,控制夹爪2打开即可将肉饼准确放置。
47.如图4所示,安装座1上还固定设置有2个限位件7,用于限制夹爪2的开度。夹爪2也可采用电动手指,以适应不方便设置压缩气源的应用场合。第一夹持件3和第二夹持件4也可设置成扁平圆柱状盒体的不到一半,在闭合状态,第一夹持件3和第二夹持件4的开口既可相互吻合,也可留有一定的间隙,仍可防止肉饼掉出。
48.本实施例适用于不易粘连的煎烤食品,如前述的汉堡包用肉饼和多数油煎或者干烤的饼类。
49.实施例二:一种翻转煎烤机器人夹具。
50.如图2所示,本实施例在实施例一的基础上增加设置有固定至安装座1的导向件5、用于在夹取和放置煎烤食品时限制其移动。如图6所示,导向件5包括导向头501和第三连接部502,导向头501又分为对称设置、呈竖直薄片状的左导向部501a和右导向部501b,第三连
接部502分为对称设置的左连接部502a和右连接部502b、分别将左导向部501a和右导向部501b连接至安装座1。分开设置的导向件5易于制造、成本较低。
51.左导向部501a为竖直设置的圆弧状薄片、圆弧内径110mm,与直径100mm的肉饼匹配,高度15mm,小于第一夹持件3的内部高度。右导向部501b对称设置,配合左导向部501a对煎烤食品围合限位,导向件5整体呈固定设置的夹钳状结构。在闭合位置时,导向头501及其围合的肉饼均位于第一夹持件3和第二夹持件4内部,第三连接部502固定连接至安装座1。
52.由于第一夹持件3和第二夹持件4对称设置,下面以第二夹持件4为例详细说明其结构。如图5所示,第二夹持件4包括上下端面和侧壁404,下端面的开口处设有底部水平的刃状边缘401、上端面中心设置有半圆形观察孔403;第二夹持件4还设置有用于固定连接至第二夹指203的第二连接部402。第二连接部402向上延伸至高出第二夹持件4的上端面,使安装好的第二夹持件4除第二连接部402外整体低于夹爪2底部;如图2所示,通过上述设置,即使夹爪2开度较大时也不会发生干涉。侧壁404和第二连接部402之间还设置有2个加强筋405。
53.第二连接部402设置的位置与第二夹持件4的开口有6mm的距离、侧壁404留有与第二连接部402平齐的缺口406。在闭合状态,上述设置使对称设置的第一夹持件3和第二夹持件4之间靠近安装座1的一侧留有较大间隙,即使在第一夹持件3和第二夹持件4吻合设置的情况下也可供第三连接部502穿设。
54.本实施例由于导向件5的设置,也适用于易于粘连的煎烤食品,如带酱汁的肉饼或带一定粘性的饼类如米饼。导向件5可以防止其粘连至第一夹持件3或第二夹持件4,在铲取和放置食品时防止食品随机移动、发生损坏或放置位置不准确。
55.实施例三:一种翻转煎烤机器人夹具。
56.如图7所示,本实施例和实施例二的区别是,第一夹持件3和第二夹持件4各为一矩形盒的一半、导向头501呈方框状,用于夹取呈矩形的煎烤食品。当煎烤食品为其他形状时,也可将第一夹持件3和第二夹持件4设置成截面为其他多边形、椭圆形、腰圆形甚至不规则形状的盒状容器的一半或小于一半。导向头501相应地匹配设置。
57.如图8所示,作为本实施例的一种变化方式,夹爪2也可采用夹指平行设置的气动手指或电动手指,此时第一夹指202和第二夹指203平行移动,第一夹持件3和第二夹持件4相应地相向或相背平行移动。图8所示为本变化方式的打开状态。本变化方式适合应用于较窄的煎烤食品,在夹取时夹具的工作空间需求较小,可以较密集地布置煎烤食品。
58.如图9和图10所示,作为本实施例的另一种变化方式,导向头501可以设置成一个封闭的圆环或方框。此时可以更可靠地将煎烤食品限制在原来位置上,适用于在夹取时可能发生向前后变形的较软的煎烤食品,如较薄的肉饼。
59.实施例四:一种翻转煎烤机器人。
60.如图11所示,本实施例的翻转煎烤机器人用于夹取、翻转煎烤食品,包括机械臂1000(仅示出安装接口)和实施例二所述的翻转煎烤机器人夹具;所述翻转煎烤机器人夹具的安装座1通过快换模块2000连接至机械臂1000;安装座1与快换模块2000连接的位置高于夹爪2,保证第一夹持件3和第二夹持件4的底部低于快换模块2000的最低位置。快换模块2000为气动快换模块,机械臂1000和快换模块2000及夹爪2之间还有气动管路连接,均为标准的连接方式,在此不再详述。在机械臂1000控制夹爪2带动第一夹持件3和第二夹持件4夹
取煎烤食品后,即可进行移动、翻转和放置。
61.一种典型的应用方式是在多个煎台上进行多种、多个煎烤食品的加工,借助机械臂可以完成准确、快速的夹取、移动和翻转动作,并通过快换模块的辅助,自动切换不同的夹具,对不同的食品进行分时处理。这些操作都需要可靠的、适应快速移动和翻转的夹具辅助完成。同时通过煎台温度控制、实时测量、准确计时等手段,可在大批量加工的同时保证产品质量,发挥自动化烹饪设备的优势。
62.上述仅为本技术的较佳实施例及所运用的技术原理,在不脱离本技术构思的情况下,还可以进行各种明显的变化、重新调整和替代。本领域技术人员可由本说明书所揭露的内容轻易地了解本技术的其他优点和功效。本技术还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本技术的精神的情况下进行各种修饰或改变。在不冲突的情况下,以上实施例及实施例中的特征可以相互组合。例如第一夹持件和第二夹持件、以及导向件也可不对称设置,用于特殊形状的食品;对于较狭长的食品等夹持件仅需较小开度时,因为没有干涉风险,也可将夹爪和夹持件在高度方向上平齐设置,使翻转后可以将夹持件降低至更加接近煎台的高度再打开放置食品;限位件可以固定设置,也可设置成可调,以调整夹爪的开度、增加夹具的适应性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1