玻璃幕墙清洗机器人的制作方法
1.本技术涉及幕墙清洗技术领域,尤其是涉及一种玻璃幕墙清洗机器人。
背景技术:
2.在一些室内清洗过程中,通常会对室内家具和玻璃幕墙进行清洗。为了方便快速、安全对玻璃幕墙进行清洗,施工员通常会使用玻璃幕墙清洗机器人对玻璃幕墙进行清洗。
3.相关技术中常见的玻璃幕墙清洗机器人包括滚轮、吸盘和用于清洗的毛刷辊,通过滚轮和吸盘配合在玻璃幕墙上进行位置移动,再通过毛刷辊对玻璃幕墙进行清洗。
4.针对上述中的相关技术,发明人认为存在以下缺陷:该玻璃幕墙清洗机器人在清洗玻璃时,毛刷辊转动时容易造成污渍飞溅,污染其他区域的玻璃,影响清洗效率。
技术实现要素:
5.为了改善毛刷辊转动时容易造成污渍飞溅,污染其他区域的玻璃,影响清洗效率的问题,本技术提供一种玻璃幕墙清洗机器人。
6.本技术提供的一种玻璃幕墙清洗机器人采用如下的技术方案:
7.一种玻璃幕墙清洗机器人,包括清洗机器人本体和安装于清洗机器人本体上的刷洗组件,所述刷洗组件包括固定安装于清洗机器人本体上的支撑架、支撑固定于支撑架上的毛刷辊和用于驱动毛刷辊的驱动件,毛刷辊与玻璃幕墙抵接,所述玻璃幕墙清洗机器人还包括防飞溅组件,所述防飞溅组件包括罩设于毛刷辊上的遮挡壳,遮挡壳两端固定于支撑架上。
8.通过采用上述技术方案,清洗机器人本体移动到所需位置之后,驱动件驱动毛刷辊对该区域的玻璃幕墙进行清洗,在毛刷辊转动清洗时,罩设于毛刷辊上的遮挡壳能够对毛刷辊转动时飞溅的污渍进行遮挡,减少了毛刷辊转动时容易造成污渍飞溅,污染其他区域的玻璃,影响清洗效率的可能。
9.可选的,所述遮挡壳端部设有连接孔,支撑架侧壁上设有与连接孔对应的螺纹孔。
10.通过采用上述技术方案,将遮挡壳上的连接孔对准支撑架侧壁上的螺纹孔,通过螺栓能够将遮挡壳固定在支撑架上,方便安装和拆卸遮挡壳,便于定时拆卸遮挡壳进行清洗。
11.可选的,所述防飞溅组件还包括安装于遮挡壳上用于封闭毛刷辊封闭壳,封闭壳与遮挡壳可拆卸连接。
12.通过采用上述技术方案,在使用完玻璃幕墙清洗机器人后能够使用封闭壳将毛刷辊进行封闭处理,减少了毛刷辊受灰尘污染,清洗玻璃幕墙不干净的可能。
13.可选的,所述遮挡壳内部中空、一面敞口,遮挡壳敞口面所在侧壁上设有凸起;封闭壳内部中空、一面敞口,封闭壳敞口面所在侧壁上设有与凸起配合卡接的卡槽。
14.通过采用上述技术方案,将遮挡壳上的凸起插入封闭壳上的卡槽内,进而将遮挡壳与封闭壳卡接固定,实现封闭壳与遮挡壳可拆卸连接;在使用玻璃幕墙清洗机器人清洗
时,取下封闭壳,使用完毕后将封闭壳与遮挡壳卡接,保护毛刷辊,减少毛刷辊受灰尘污染影响清洗的可能。
15.可选的,所述清洗机器人本体包括壳体、安装于壳体侧壁的吸盘和安装于壳体上的滚轮。
16.通过采用上述技术方案,壳体上的吸盘和滚轮配合使用,能够方便清洗机器人本体移动到所需位置固定,对指定区域内的玻璃幕墙进行清洗。
17.可选的,所述滚轮上套设有柔性垫。
18.通过采用上述技术方案,清洗机器人本体通过滚轮在玻璃幕墙上移动,滚轮上的柔性垫能够减少滚轮转动时划伤玻璃幕墙表面的可能。
19.可选的,所述支撑架上设有喷水柱。
20.通过采用上述技术方案,喷水柱喷水与毛刷辊配合使用,能够更好的对玻璃幕墙进行刷洗,使玻璃幕墙清洗得更干净。
21.可选的,所述清洗机器人本体上设有与玻璃幕墙抵接的擦干条。
22.通过采用上述技术方案,清洗机器人通过毛刷辊对玻璃幕墙进行清洗之后,壳体通过滚轮移动,清洗机器人本体干条能够对清洗部位进行擦干,省去了操作员再去进行擦干的步骤,使清洗过程更加便捷。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.清洗机器人本体移动到所需位置之后,驱动件驱动毛刷辊对该区域的玻璃幕墙进行清洗,在毛刷辊转动清洗时,罩设于毛刷辊上的遮挡壳能够对毛刷辊转动时飞溅的污渍进行遮挡,减少了毛刷辊转动时容易造成污渍飞溅,污染其他区域的玻璃,影响清洗效率的可能;
25.2.遮挡壳上安装有封闭壳,将遮挡壳上的凸起插入封闭壳上的卡槽内,进而将遮挡壳与封闭壳卡接固定,实现封闭壳与遮挡壳可拆卸连接;在使用玻璃幕墙清洗机器人清洗时,取下封闭壳,使用完毕后将封闭壳与遮挡壳卡接,保护毛刷辊,减少毛刷辊受灰尘污染影响清洗的可能。
附图说明
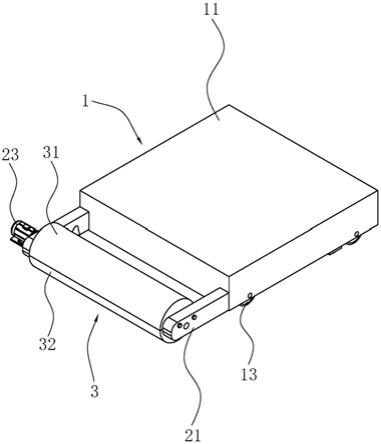
26.图1是本技术实施例的玻璃幕墙清洗机器人的整体结构示意图;
27.图2是玻璃幕墙清洗机器人的爆炸示意图;
28.图3是玻璃幕墙清洗机器人的仰视图。
29.附图标记说明:1、清洗机器人本体;11、壳体;12、吸盘;13、滚轮;131、柔性垫;14、擦干条;2、刷洗组件;21、支撑架;211、螺纹孔;212、喷水柱;22、毛刷辊;23、驱动件;3、防飞溅组件;31、遮挡壳;311、连接孔;312、凸起;313、开口;32、封闭壳;321、卡槽。
具体实施方式
30.以下结合附图1
‑
3对本技术作进一步详细说明。
31.本技术实施例公开一种玻璃幕墙清洗机器人。参照图1和图2,玻璃幕墙清洗机器人包括清洗机器人本体1、安装于清洗机器人本体1上的刷洗组件2和安装于刷洗组件2上的防飞溅组件3。防飞溅组件3可以减少刷洗组件2在清洗玻璃幕墙时污渍飞溅到其他区域的
可能。
32.参照图1和图3,清洗机器人本体1包括壳体11、安装于壳体11上的吸盘12和滚轮13。壳体11整体为长方体,吸盘12焊接于壳体11外侧壁,清洗机器人本体1可以通过吸盘12固定在玻璃幕墙上。壳体11上与吸盘12所在面相邻两侧壁上通过轴承与滚轮13焊接或螺栓连接,轴承一端与滚轮13固定连接,另一端与电机的输出轴固定连接,滚轮13有四个,四个滚轮13,均匀分布于壳体11两侧。清洗机器人本体1可以通过吸盘12与滚轮13配合在玻璃幕墙上移动,为了防止滚轮13在玻璃幕墙上滚动时损坏玻璃的可能,滚轮13上套设有柔性垫131.
33.参照图2和图3,刷洗组件2安装于壳体11上与吸盘12所在面相邻一侧,刷洗组件2所在侧面与滚轮13所在侧面相邻。刷洗组件2包括固定于壳体11外侧壁的支撑架21、安装于支撑架21上的毛刷辊22和驱动毛刷辊22的驱动件23。支撑架21整体由两根横截面为矩形的长杆构成,长杆端部与壳体11侧面焊接或螺栓连接固定,两根长杆平行设置。毛刷辊22支撑固定于两根长杆之间。驱动件23可以为小型电机,长杆上远离毛刷辊22一侧焊接有安装板,安装板与长杆垂直,驱动件23与安装板螺栓连接固定,驱动件23与壳体11内部电源连接,驱动件23的输出轴穿过长杆并与毛刷辊22一端焊接,启动驱动件23,驱动件23可以带动毛刷辊22转动,进而对玻璃幕墙进行刷洗。为了将玻璃幕墙清洗得更加干净,支撑架21上焊接有喷水柱212,喷水柱212喷水能够使毛刷辊22对玻璃幕墙刷洗得更加干净。为了能够对刷洗后的玻璃幕墙进行擦干处理,壳体11上与吸盘12同侧上螺栓连接有擦干条14,擦干条14可以为横截面为矩形的吸水泡沫棉条,在使用一段时间后还能够对擦干条14进行更换。
34.参照图1和图2,防飞溅组件3安装于支撑架21上,防飞溅组件3包括遮挡壳31。遮挡壳31内部中空、一侧敞口,敞口面的宽度大于毛刷辊22的直径,遮挡壳31的长度与支撑架21的两根长杆之间的距离一致。遮挡壳31两端开设有开口313,开口313的宽度大于毛刷辊22辊轴的直径,开口313可以方便将遮挡壳31向下移动将遮挡壳31罩设于毛刷辊22上,毛刷辊22转轴穿过开口313不影响毛刷辊22转动。遮挡壳31两端开口313所在侧壁上分别开设有连接孔311,支撑架21的两根长杆上靠近毛刷辊22一端分别开设有与连接孔311对应的螺纹孔211,螺纹孔211贯穿长杆,将遮挡壳31的连接孔311对准螺纹孔211,再通过螺栓将遮挡壳31支撑固定在支撑架21上。当毛刷辊22转动清洗玻璃幕墙时,罩设于毛刷辊22上的遮挡壳31能够阻挡清洗污渍飞溅,减少了毛刷辊转动时容易造成污渍飞溅,污染其他区域的玻璃,影响清洗效率的可能。为了减少在玻璃幕墙清洗机器人使用结束后,空气中的灰尘附着到毛刷辊22上影响后面毛刷辊22对玻璃幕墙清洗的可能,遮挡壳31上安装有封闭壳32,封闭壳32的形状大小与遮挡壳31的形状大小相同。遮挡壳31敞口所在侧壁上注塑一体成型形成凸起312,封闭壳32上敞口所在侧壁上开设有与凸起312配合卡接的卡槽321,封闭壳32通过卡槽321与遮挡壳31合拢卡接进而将封闭壳32固定在遮挡壳31上,遮挡壳31和封闭壳32合拢固定时整体呈圆柱,此时毛刷辊22位于遮挡壳31和封闭壳32所形成的内部空间,遮挡壳31和封闭壳32能够对内部的毛刷辊22起到保护作用。
35.本技术实施例一种玻璃幕墙清洗机器人的实施原理为:当清洗机器人本体1运动到所需位置的玻璃幕墙上时,启动驱动件23,驱动件23带动毛刷辊22转动,喷水柱212对玻璃喷水,毛刷辊22可以对玻璃进行刷洗;罩设于毛刷辊22上的遮挡壳31能够在毛刷辊22转动时,阻挡毛刷辊22转动产生的污渍飞溅到其他区域中,减少了毛刷辊转动时容易造成污
渍飞溅,污染其他区域的玻璃,影响清洗效率的可能。
36.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1