核电高空爬壁核清洁机器人的制作方法
1.本实用新型涉及爬壁机器人技术领域,尤其涉及核电高空爬壁核清洁机器人。
背景技术:
2.爬壁机器人按照吸附原理可以分为磁吸式、吸气式和吸盘式。其中,磁吸式爬壁机器人适用于像核电站穹顶和大型储罐等磁性金属墙面,这种墙面可以利用磁性履带来吸附行走,具有良好的稳定性和操控性。然而现有的磁性爬壁机器人设计多针对于竖直磁性金属墙壁,其大多只有一个磁吸力发生源,因此,在核电站穹顶这些半球式设计的结构上使用这类爬壁机器人很容易造成机器人倾覆跌落的问题,尤其是其爬行履带在非平面爬壁上容易发生受力不均衡等影响爬壁机器人姿态稳定的问题;另外,对于一些壁面附着污渍或其他需清洁物质时,传统的爬壁机器人在清洁时,难以稳定可靠地将清扫物进行收集。
技术实现要素:
3.有鉴于此,本实用新型的目的在于提出一种实施可靠、行进稳定且清扫效果佳的核电高空爬壁核清洁机器人。
4.为了实现上述的技术目的,本实用新型所采用的技术方案为:
5.一种核电高空爬壁核清洁机器人,用于爬行壁面的清洁,该爬行壁面包括核电站穹顶或侧壁,其包括:车体、驱动组件、履带组件、电磁吸附组件、清扫组件、控制器和电源;所述车体为矩形壳体结构,其内部形成安装腔;所述驱动组件为一对且设置在车体宽度方向两侧;所述履带组件为一对且设置在车体宽度方向两侧并与驱动组件一一对应连接;所述电磁吸附组件为一对以上且相对设置在车体的底板上,所述电磁吸附组件用于得电吸附于金属材质的爬行壁面;所述清扫组件固定在车体一端且用于清扫爬行壁面;所述控制器设置在安装腔内且与电磁吸附组件、驱动组件和清扫组件电连接,由控制器控制电磁吸附组件得电或失电,以及控制驱动组件驱动履带组件带动车体在爬行壁面行进和控制清扫组件启闭;所述电源与控制器、驱动组件、电磁吸附组件和清扫组件连接。
6.作为一种可能的实施方式,进一步,所述清扫组件包括:
7.连接壳体,为矩形壳体结构,且一侧固定在车体一端,其内部形成容置腔;
8.清扫电机,为一对且相对设置在容置腔两端,清扫电机的驱动轴向下穿出连接壳体;
9.清扫部,为圆盘结构,且数量与清扫电机一一对应,其一端面中心与清扫电机的驱动轴固定连接,其一端面为清扫面且用于与爬行壁面相贴;
10.吸尘壳体,为下端面敞开的矩形壳体结构且罩设在连接壳体的容置腔底部,所述容置腔的底部设有矩形结构的通槽;
11.清扫件,其主体为圆筒状,其圆筒状表面设置有清扫刷毛,所述清扫件的两端分别转动连接在吸尘壳体罩设的容置腔底部且清扫件的下部部分穿出通槽并外露在连接壳体下方;
12.旋转电机,固定在容置腔内,且其驱动轴与清扫件一端连接,由旋转电机驱动清扫件旋转,使清扫件将其清洁区域的清扫物扫入吸尘壳体内;
13.负压管,一端穿入到吸尘壳体内,另一端穿入安装腔内且延伸至车体另一端并穿出,该负压管用于与外部负压吸尘设备连接。
14.作为一种较优的选择实施方式,优选的,所述车体上端还设有可启闭安装腔的盖板;本方案还包括安全绳组件,该安全绳组件包括安全绳把手和连接板,所述安全绳把手为u形结构,所述连接板的一端面与底板下端面中心固定连接,所述安全绳把手的u形结构的两端由盖板穿入到安装腔内,且穿过底板并与连接板一端面固定连接;安全绳把手远离连接板的端部穿出盖板,且所述盖板13对应设有供安全绳把手穿出的避让槽;所述负压管穿入安装腔的部分穿过安全绳把手的u形结构。
15.作为一种可能的实施方式,进一步,所述履带组件包括:履带本体、连接块和永磁铁,所述履带本体为链式履带且与驱动组件连接;所述连接块和永磁块均为多个,且呈环形阵列交替布设在履带本体的外周侧;其中,相邻永磁块之间同性磁极相对;另外,所述连接块远离履带本体的端面与永磁块远离履带本体的端面相平或高于永磁块远离履带本体的端面。
16.作为一种较优的选择实施方式,优选的,所述电磁吸附组件为两对,且两两相对设置在车体的底板上,其中,所述电磁吸附组件的一端穿入到安装腔内,其另一端穿出底板,所述电磁吸附组件穿出底板的端部不高于履带组件将车体底板抬升的高度。
17.作为一种较优的选择实施方式,优选的,所述连接块的数量与所述永磁块的数量为1∶1,且连接块与永磁块之间的布设间距为3~20mm;所述连接块远离所述履带本体的端面高于所述永磁块远离所述履带本体的端面0~5mm。
18.作为一种较优的选择实施方式,优选的,所述连接块为橡胶块,所述永磁块为钕铁硼磁铁;所述的电源为外接电源或内置电源,为内置电源时,所述内置电源固定在安装腔内。
19.作为一种较优的选择实施方式,优选的,所述驱动组件包括:驱动电机和驱动齿轮;所述驱动电机为一对且相对设置在安装腔内部一侧的两端,所述驱动电机的驱动轴穿出安装腔并外露在车体侧面;所述驱动齿轮为一对且与驱动电机一一对应并连接在驱动电机穿过安装腔的驱动轴上,所述履带本体的内侧绕过一对驱动齿轮且配合连接后,形成环形封闭结构。
20.作为一种较优的选择实施方式,优选的,本方案还包括:
21.隔板,为一对且分别固定在车体设有履带组件的侧面,将驱动齿轮隔挡于隔板和车体侧壁之间;所述车体侧壁上设有与隔板固定连接的连接柱。
22.作为一种较优的选择实施方式,优选的,所述控制器设为mcu控制单元,所述核电站磁吸爬壁机器人还包括:倾角传感单元和电流控制单元,所述倾角传感单元设置在安装腔内且与mcu控制单元连接,所述倾角传感单元用于采集所述电磁吸附组件所在底板位置的实时三维角度信息和运动姿态,其包括陀螺仪、加速度计、磁力计和微处理器,该微处理器分别与陀螺仪、加速度计和磁力计连接;所述电流控制单元设置在安装腔内且分别与mcu控制单元和电磁吸附组件连接,由所述电流控制单元控制电磁吸附组件的通电电流强度。
23.采用上述的技术方案,本实用新型与现有技术相比,其具有的有益效果为:本方案
巧妙性通过在车体的一端设置清扫组件,由控制器控制驱动组件带动履带组件牵引车体行进,同时清扫组件由控制器控制启闭,使得清扫组件的清扫部对爬行壁面进行清扫时,能够进一步通过旋转电机驱动清扫件旋转,使清扫件将其清洁区域的清扫物扫入吸尘壳体内;令被清扫的清扫物在扫入吸尘壳体后,通过外部吸尘设备与负压管对接后,通过负压管将清扫物抽吸收纳,完成清扫物的稳定归集处理,另外,本方案还巧妙性通过在爬壁机器人的履带上设置交错布设的连接块和永磁块,且通过相邻永磁块同性相对的方式,使得履带组件的履带本体能够保持排斥绷紧,同时利用橡胶块作为连接块,令履带组件与爬行壁面能够更好的接触贴合,本方案还通过底板上两两相对设置的电磁吸附组件来提高和均衡车体底板与爬行壁面的吸附力,使得爬壁机器人的行进更为稳定可靠。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.图1是本实用新型机器人的简要实施结构示意图之一;
26.图2是本实用新型机器人的简要实施结构示意图之二,其中,盖板隐去;
27.图3是本实用新型机器人的简要实施结构示意图之三;
28.图4是本实用新型机器人的简要剖切机构示意图;
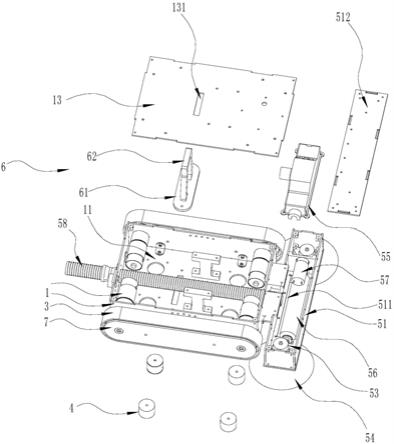
29.图5是本实用新型机器人的简要部分结构爆炸示意图之一;
30.图6是本实用新型机器人的简要部分结构爆炸示意图之二;
31.图7是本实用新型机器人的履带组件的实施结构之一的简要示意图;
32.图8是本实用新型机器人的简要控制连接关系图之一;
33.图9是本实用新型机器人的简要控制连接关系图之二。
具体实施方式
34.下面结合附图和实施例,对本实用新型作进一步的详细描述。特别指出的是,以下实施例仅用于说明本实用新型,但不对本实用新型的范围进行限定。同样的,以下实施例仅为本实用新型的部分实施例而非全部实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
35.实施例1
36.如图1至图8之一所示,本实用新型一种核电高空爬壁核清洁机器人,用于爬行壁面的清洁,该爬行壁面包括核电站穹顶或侧壁,该爬壁核清洁机器人包括:车体1、驱动组件2、履带组件3、电磁吸附组件4、清扫组件5、控制器(设为mcu控制单元)和电源;所述车体为矩形壳体结构,其内部形成安装腔11;所述驱动组件2为一对且设置在车体1宽度方向两侧;所述履带组件3为一对且设置在车体1宽度方向两侧并与驱动组件2一一对应连接;所述电磁吸附组件4为一对以上且相对设置在车体1的底板12上,所述电磁吸附组件4用于得电吸附于金属材质的爬行壁面;所述清扫组件5固定在车体1一端且用于清扫爬行壁面;所述控制器设置在安装腔11内且与电磁吸附组件4、驱动组件2和清扫组件5电连接,由控制器控制
电磁吸附组件4得电或失电,以及控制驱动组件2驱动履带组件3带动车体1在爬行壁面行进和控制清扫组件5启闭;所述电源与控制器、驱动组件2、电磁吸附组件4和清扫组件5连接。
37.本方案中,作为一种可能的实施方式,进一步,所述清扫组件5包括:
38.连接壳体51,为矩形壳体结构,且一侧固定在车体一端,其内部形成容置腔52;
39.清扫电机53,为一对且相对设置在容置腔52两端,清扫电机53的驱动轴向下穿出连接壳体51;
40.清扫部54,为圆盘结构,且数量与清扫电机53一一对应,其一端面中心与清扫电机53的驱动轴固定连接,其一端面为清扫面且用于与爬行壁面相贴;
41.吸尘壳体55,为下端面敞开的矩形壳体结构且罩设在连接壳体51的容置腔52底部,所述容置腔52的底部设有矩形结构的通槽511;
42.清扫件56,其主体为圆筒状,其圆筒状表面设置有清扫刷毛,所述清扫件56的两端分别转动连接在吸尘壳体55罩设的容置腔52底部且清扫件56的下部部分穿出通槽511并外露在连接壳体51下方;
43.旋转电机57,固定在容置腔52内,且其驱动轴与清扫件56一端连接(也可通过连接皮带或链条间接连接),由旋转电机57驱动清扫件56旋转,使清扫件56将其清洁区域的清扫物扫入吸尘壳体55内;
44.负压管58,一端穿入到吸尘壳体55内,另一端穿入安装腔52内且延伸至车体1另一端并穿出,该负压管58用于与外部负压吸尘设备连接,如吸尘器,而负压管58与吸尘器之间还可以通过连接软管进行连接,以避免对车体1的行进造成干扰。
45.本方案中,所述车体1上端还设有可启闭安装腔11的盖板13;而为了提高车体1的安全性,本方案中,作为一种较优的选择实施方式,优选的,本方案还包括安全绳组件6,该安全绳组件6包括安全绳把手62和连接板61,所述安全绳把手62为u形结构,所述连接板61的一端面与底板12下端面中心固定连接,所述安全绳把手的u形结构的两端由盖板13穿入到安装腔内,且穿过底板12并与连接板61一端面固定连接;安全绳把手62远离连接板61的端部穿出盖板,且所述盖板13对应设有供安全绳把手62穿出的避让槽131;所述负压管58穿入安装腔11的部分穿过安全绳把手62的u形结构。
46.在行进组件方面,本方案中,作为一种可能的实施方式,进一步,所述履带组件3包括:履带本体31、连接块32和永磁铁33,所述履带本体31为链式履带且与驱动组件2连接;所述连接块32和永磁块33均为多个,且呈环形阵列交替布设在履带本体31的外周侧;其中,相邻永磁块33之间同性磁极相对;另外,所述连接块32远离履带本体31的端面与永磁块33远离履带本体31的端面相平或高于永磁块33远离履带本体31的端面;优选的,所述连接块32的数量与所述永磁块33的数量为1∶1,且连接块32与永磁块33之间的布设间距为3~20mm;所述连接块32远离所述履带本体31的端面高于所述永磁块33远离所述履带本体31的端面0~5mm;由于相邻永磁块33之间为同性磁极相对,因此,控制连接块32与永磁块33的布设间距一方面间接限定了永磁块33之间的相邻间距,令相邻永磁块之间能够排斥,将履带本体31绷紧,降低其脱链概率,同时还能够提高履带本体31上连接的连接块32的整体平整性,使其与爬行壁面的接触贴合度更高。
47.作为一种较优的选择实施方式,优选的,所述连接块32为橡胶块,所述永磁块33为钕铁硼磁铁;通过钕铁硼磁铁的强吸附力,能够令履带组件3与爬行壁面的吸附力增强,同
时,通过电磁吸附组件4和履带组件3的永磁块33分别提供爬壁机器人与爬行壁面的吸附力,能够使得爬壁机器人的履带组件3与爬行壁面更好地贴合接触,避免受力不均问题带来的车体1不稳定或倾覆风险增加的隐患。其中,连接块32由于是采用橡胶材质,因此,其具有一定的弹性,而永磁块33本身是硬质材料,所以在行进速度较快时,永磁块33若是与连接块32相平时,其可能会对爬行壁面产生一定的撞击力,为了降低撞击强度和避免永磁铁33与爬行壁面的发生冲击,将连接块32选用成略高于永磁块33的形式,有助于保护爬行壁面和永磁块33。
48.而为了方便进行电力供应,所述的电源为外接电源或内置电源,为内置电源时,所述内置电源固定在安装腔11内,内置电源的优点在于能够令车体1的结构更为灵活,避免了爬壁过程中的布线局限,而外接电源的形式可以令爬壁机器人获得更高的行进电力续航,提高其持续工作时间。
49.为了提高电磁吸附的平衡性和可靠性,本方案中,作为一种较优的选择实施方式,优选的,所述电磁吸附组件4为两对,且两两相对设置在车体1的底板12上,其中,所述电磁吸附组件4的一端穿入到安装腔11内,其另一端穿出底板12,所述电磁吸附组件4穿出底板12的端部不高于履带组件3将车体1底板12抬升的高度。
50.作为驱动组件2的一种实施结构形式,本方案中,作为一种较优的选择实施方式,优选的,所述驱动组件2包括:驱动电机21和驱动齿轮22;所述驱动电机21为一对且相对设置在安装腔11内部一侧的两端,所述驱动电机21的驱动轴穿出安装腔11并外露在车体1侧面;所述驱动齿轮22为一对且与驱动电机21一一对应并连接在驱动电机21穿过安装腔的驱动轴上,所述履带本体31的内侧绕过一对驱动齿轮22且配合连接后,形成环形封闭结构。
51.本方案中,为了避免杂物进入到驱动齿轮22和履带本体31的配合部,作为一种较优的选择实施方式,优选的,本方案还包括:
52.隔板7,为一对且分别固定在车体1设有履带组件3的侧面,将驱动齿轮22隔挡于隔板7和车体1侧壁之间;所述车体1侧壁上设有与隔板7固定连接的连接柱71。
53.实施例2
54.如图9所示,本实施例与实施例1大致相同,其不同之处在于,本实施例中,所述核电站磁吸爬壁机器人还包括:倾角传感单元和电流控制单元,所述倾角传感单元设置在安装腔内且与mcu控制单元连接,所述倾角传感单元用于采集所述电磁吸附组件所在底板位置的实时三维角度信息和运动姿态,其包括陀螺仪、加速度计、磁力计和微处理器,该微处理器分别与陀螺仪、加速度计和磁力计连接;所述电流控制单元设置在安装腔内且分别与mcu控制单元和电磁吸附组件连接,由所述电流控制单元控制电磁吸附组件的通电电流强度。
55.以上所述仅为本实用新型的部分实施例,并非因此限制本实用新型的保护范围,凡是利用本实用新型说明书及附图内容所作的等效装置或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1