一种智能升降教学设备的制作方法
1.本实用新型涉及教学设备技术领域,特别是涉及一种智能升降教学设备。
背景技术:
2.教学设备是指完成教学任务所需的全部设施和器材,包括室内装置、教学仪器、桌椅、教具、电教仪器等。
3.课桌是最常用的教学设备之一,现目前大部分课桌难以进行升降,而具有高度调节功能的课桌,又难以根据不同人的身高进行智能高度调节,为此我们提出了一种智能升降教学设备,以解决上述提出的技术问题。
技术实现要素:
4.本实用新型提供了一种智能升降教学设备以解决上述背景技术提出的课桌难以根据不同人的身高进行智能高度调节的问题。
5.为了实现上述目的,本实用新型采用如下技术方案:
6.一种智能升降教学设备,包括桌板、桌腿以及横梁;
7.所述桌板上表面的左上角嵌入有显示屏和矩阵键盘,所述桌板的底部通过螺钉安装有单片机和激光测距传感器;
8.所述桌腿的数量为两条,两条所述桌腿分别位于桌板底部的左右两侧,两条所述桌腿的内部均开设有升降腔和驱动腔,所述升降腔位于驱动腔的正上方,所述升降腔的内部设有能够上下滑动的升降腿,所述升降腔内部的底面转动连接有丝杠,所述丝杠的底部贯穿至驱动腔并焊接有从动锥齿轮;
9.所述横梁焊接在两条所述桌腿之间的下端,所述横梁的内部转动连接有传动轴,所述传动轴的外部固定连接有从动齿轮。
10.进一步的,两条所述桌腿的底部均焊接有桌脚,左侧的所述桌脚的上表面嵌入有反射板,所述反射板位于左侧的所述桌腿的后方。
11.进一步的,所述激光测距传感器位于左侧的所述桌腿的正后方,并且所述激光测距传感器与反射板上下齐平。
12.进一步的,所述丝杠的上端贯穿进升降腿的内部并与升降腿螺纹连接,所述升降腿的顶部贯穿出桌腿并与桌板的底部固定连接。
13.进一步的,所述传动轴的左右两端分别贯穿进两条所述桌腿内部的驱动腔,并且所述传动轴的左右两端均焊接有主动锥齿轮,并且左右两端的主动锥齿轮分别与同一侧的所述从动锥齿轮啮合。
14.进一步的,所述横梁的上表面通过螺钉安装有步进电机,所述步进电机的动力输出固定动连接有主动齿轮,所述步进电机和主动齿轮的外部盖有防护罩。
15.进一步的,所述横梁内部的上端转动连接有惰轮,所述惰轮位于从动齿轮的正上方并与从动齿轮啮合,所述惰轮的顶部贯穿出横梁并与主动齿轮啮合。
16.进一步的,所述单片机位于两条所述桌腿之间,所述矩阵键盘位于显示屏的前方,所述显示屏、矩阵键盘、激光测距传感器以及步进电机均通过导线与单片机相接。
17.与现有技术相比,本实用新型实现的有益效果:
18.单片机能够对步进电机进行自动操控,而步进电机可以带动传动轴进行转动,转动的传动轴通过主动锥齿轮与从动锥齿轮的啮合,可以带动丝杠进行转动,当丝杠进行转动后,便可推动升降腿在桌腿中进行上下升降,从而调节桌板与地面之间的距离,于是通过单片机与步进电机配合,便可自动对课桌的高度进行调节;
19.激光测距传感器能够对课桌高度进行测量,同时测量数据会转换成电信号发送至单片机,而通过矩阵键盘可以将使用者的身高数据输入单片机,随后单片机便可根据身高对课桌高度进行调节,于是通过这种方式,在课桌使用时,将使用者的身高输入单片机,单片机便会自动根据使用者的身高来调节课桌的高度,从而使得课桌的高度调节更加智能化,省去人工手动调节的麻烦。
附图说明
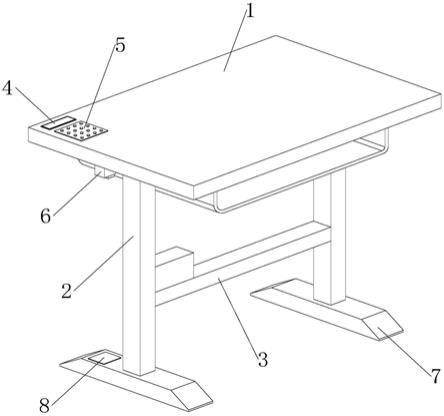
20.图1为本实用新型的立体结构示意图。
21.图2为本实用新型的内部结构示意图。
22.图3为本实用新型图2的a处局部放大示意图。
23.图4为本实用新型图2的b处局部放大示意图。
24.图1
‑
4中:1
‑
桌板,2
‑
桌腿,201
‑
升降腔,202
‑
驱动腔,3
‑
横梁,4
‑
显示屏,5
‑
矩阵键盘,6
‑
激光测距传感器,7
‑
桌脚,8
‑
反射板,9
‑
单片机,10
‑
升降腿,11
‑
丝杠,1101
‑
从动锥齿轮,12
‑
传动轴,1201
‑
主动锥齿轮,1202
‑
从动齿轮,13
‑
惰轮,14
‑
步进电机,1401
‑
主动齿轮。
具体实施方式
25.请参阅图1至图4:
26.本实用新型提供一种智能升降教学设备,包括桌板1、桌腿2以及横梁3,桌板1上表面的左上角嵌入有显示屏4和矩阵键盘5,桌板1的底部通过螺钉安装有单片机9和激光测距传感器6,桌腿2的数量为两条,两条桌腿2分别位于桌板1底部的左右两侧,两条桌腿2的内部均开设有升降腔201和驱动腔202,升降腔201位于驱动腔202的正上方,升降腔201的内部设有能够上下滑动的升降腿10,升降腔201内部的底面转动连接有丝杠11,丝杠11的底部贯穿至驱动腔202并焊接有从动锥齿轮1101,横梁3焊接在两条桌腿2之间的下端,横梁3的内部转动连接有传动轴12,传动轴12的外部固定连接有从动齿轮1202;
27.具体的,两条桌腿2的底部均焊接有桌脚7,左侧的桌脚7的上表面嵌入有反射板8,反射板8位于左侧的桌腿2的后方,激光测距传感器6位于左侧的桌腿2的正后方,并且激光测距传感器6与反射板8上下齐平,单片机9位于两条桌腿2之间,矩阵键盘5位于显示屏4的前方,显示屏4、矩阵键盘5、激光测距传感器6以及步进电机14均通过导线与单片机9相接;
28.激光测距传感器6能够朝向反射板8发射激光,反射板8再将激光反射回激光测距传感器6,从而测出激光测距传感器6与桌脚7之间的距离,而加上激光测距传感器6的厚度、桌脚7的厚度以及桌板1的后端,便可间接测出整个课桌的高度,并且激光测距传感器6会将测量数据转换成电信号发送至单片机9,单片机9对数据进行处理并可通过显示屏4显示出
来,通过矩阵键盘5可以往单片机9内输入使用者的身高数据,且身高数据通过显示屏4显示出来,单片机9内预存有不同身高对应不同课桌高度的数据;
29.丝杠11的上端贯穿进升降腿10的内部并与升降腿10螺纹连接,升降腿10的顶部贯穿出桌腿2并与桌板1的底部固定连接,传动轴12的左右两端分别贯穿进两条桌腿2内部的驱动腔202,并且传动轴12的左右两端均焊接有主动锥齿轮1201,并且左右两端的主动锥齿轮1201分别与同一侧的从动锥齿轮1101啮合,横梁3的上表面通过螺钉安装有步进电机14,步进电机14的动力输出固定动连接有主动齿轮1401,步进电机14和主动齿轮1401的外部盖有防护罩,横梁3内部的上端转动连接有惰轮13,惰轮13位于从动齿轮1202的正上方并与从动齿轮1202啮合,惰轮13的顶部贯穿出横梁3并与主动齿轮1401啮合;
30.通过单片机9可以对步进电机14进行操控,启动的步进电机14通过主动齿轮1401、惰轮13以及从动齿轮1202之间的啮合,可以带动传动轴12进行转动,转动的传动轴12通过左右两端的主动锥齿轮1201与从动锥齿轮1101的啮合,可以带动左右两侧的丝杠11进行同步转动,而当丝杠11转动后,丝杠11便可推动升降腿10在升降腔201内进行上下滑动,同时桌板1被升降腿10带动进行升降,从而调节课桌整体高度。
31.综上所述,在课桌使用时,通过矩阵键盘5可以往单片机9内输入使用者的身高数据,之后单片机9对输入的身高数据进行处理,并与预存课桌高度数据进行比对,例如输入的身高为160cm,课桌高度对应为100cm,那么单片机9便会自动将步进电机14启动,接着启动的步进电机14推动升降腿10进行升降,从而调节课桌高度,当课桌高度调节到100cm后,单片机9便会将步进电机14关闭,于是通过这种方式,在课桌使用时,将使用者的身高输入单片机9,单片机9便会自动根据使用者的身高来调节课桌的高度,从而使得课桌的高度调节更加智能化,省去人工手动调节的麻烦。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1