一种扫地机器人的制作方法
1.本实用新型涉及机器人清扫领域,具体涉及一种扫地机器人。
背景技术:
2.随着经济的飞速发展,越来越多的人选择饲养猫咪或者狗狗作为工作学习之余的慰藉。目前对于一个家庭选择饲养宠物前所必须考虑的一大问题是“宠物毛发、毛屑是否会对家庭的清洁、家人的健康带来困扰”。目前对宠物毛发、毛屑的清理,主要通过传统的人工手动吸尘器,或者非移动式宠物除毛装置。
3.现有专利cn112493165a中公开了一种宠物毛发清洁机器人及其系统,通过设置与吸尘器相同原理的毛发收集结构,实现对宠物毛发的收集,但是这种方法较为耗电,缩短了扫地机器人机器人一次充电可用时长,且宠物毛发收集过程中风机的风力调节较难掌控,可能会出现因为吸附风力过大而伤害宠物表皮的情况。
技术实现要素:
4.为解决上述问题,本实用新型提供了一种扫地机器人,通过设置静电吸附装置实现对空气中漂浮的毛屑和灰尘的吸附,避免直接使用风机吸附毛发因风力过大而伤害宠物皮毛的问题。本实用新型的具体技术方案如下:
5.一种扫地机器人,所述扫地机器人包括:若干个静电吸附孔,按照预设图形均匀地分布于扫地机器人的顶盖;静电吸附装置,设置于扫地机器人的顶盖若干个静电吸附孔下方,用于产生静电吸附空气中漂浮的灰尘和毛屑;清扫装置,设置于凸出于扫地机器人底盘外部的位置,用于清扫扫地机器人行进平面的垃圾;吸收装置,设置于扫地机器人机身内部,包含吸收输入端口和吸收输出端口,用于吸收静电吸附装置吸附的灰尘和毛屑和/或吸收清扫装置清扫的垃圾;尘盒,设置于扫地机器人机身内部延伸至扫地机器人底盘的位置,用于存储吸收装置吸收的灰尘、毛屑和垃圾。
6.与现有技术相比,本技术方案采用静电吸附装置实现对扫地机器人上方空气中漂浮的灰尘和毛屑的吸附,解决了利用风机直接吸收空气漂浮的灰尘和毛屑耗电量较大的问题,同时避免了因风机吸力过大而伤害宠物皮毛的问题。
7.进一步地,所述若干个静电吸附孔包括两种不同半径的静电吸附孔,所述两种不同半径的静电吸附孔按照预设图形交错的均匀分布于扫地机器人的顶盖,一个静电吸附孔的半径与其相邻的两个静电吸附孔的半径不同。本技术方案中静电吸附孔以两种不同尺寸交错的分布于扫地机器人顶盖,使得静电吸附装置能够更充分的吸附空气中漂浮的灰尘和毛屑,实现更优的吸附效果。
8.进一步地,所述静电吸附装置包括静电发生装置和静电吸附层;所述静电发生装置,用于产生静电;所述静电吸附层,可拆卸地设置于所述静电发生装置的上表面,用于借助静电发生装置产生的静电吸附空气中漂浮的灰尘和毛屑。该技术方案通过静电吸附层使得灰尘和毛屑被更牢固的吸附,且可拆卸的静电吸附层解决了在静电吸附层的吸附损耗问
题,通过更换新的静电吸附层或者更换不同材质的静电吸附层保持静电吸附层的吸附能力。
9.进一步地,所述静电吸附装置还包括集尘装置,所述集尘装置用于将所述静电吸附层吸附的空气中漂浮的灰尘和毛屑归集到预设指定位置。该技术方案中设置集尘装置将静电吸附层吸附的灰尘和毛屑归集,以便于扫地机器人对吸附的灰尘和毛屑进行存储,避免静电吸附成堆积太多的灰尘和毛屑而影响静电吸附装置的吸附能力。
10.进一步地,所述集尘装置为t字型齿梳状结构,所述集尘装置的顶部为预设宽度的平板,所述平板与齿梳状结构结合形成t字型齿梳状结构,所述齿梳状结构由若干个表面具有凸起的棒状结构组成。本技术方案中集成装置的顶部配置为预设宽度的平板,使得集尘装置在归集静电吸附层吸附的灰尘和毛屑时,灰尘和毛屑不会通过静电吸附孔重新飞扬至扫地机器人外部的空气中。
11.进一步地,所述尘盒包括两个存储端口和一个倾倒端口;其中,第一存储端口设置于所述尘盒的顶部,用于实现尘盒接收所述静电吸附装置吸附的灰尘和毛屑;第二存储端口设置于所述尘盒的侧立面,用于实现尘盒接收所述吸收装置吸收的垃圾;所述倾倒端口,设置于设置于所述尘盒的底部或者设置于与第二存储端口相对的一侧的尘盒的侧立面,用于倾倒尘盒中存储的灰尘、毛屑和垃圾。该技术方案中尘盒设有两个存储端口实现对吸收装置和静电吸附装置吸收的垃圾的存储,单独设立倾倒端口,以便于用户对扫地机器人尘盒垃圾的清理,将倾倒窗口设置于尘盒底部或尘盒侧立面解决了用户倾倒垃圾时需要触碰垃圾的问题。
12.进一步地,所述尘盒的倾倒端口所在一侧的外部设有卡扣,用于控制所述倾倒端口的开关;所述第一存储端口和所述倾倒端口都具备开关功能;所述第一存储端口处于打开状态或关闭状态取决于所述静电吸附装置是否工作,当所述静电吸附装置工作时,所述第一存储端口处于打开状态,当所述静电吸附装置不工作时,所述第一存储端口处于关闭状态;所述倾倒端口处于打开状态或关闭状态取决于所述卡扣,当所述卡扣开启,所述倾倒端口处于打开状态,当所述卡扣关闭,所述倾倒端口处于关闭状态。
13.进一步地,所述吸收装置包括电机、风机和滤网;其中,所述电机,用于提供动力以带动所述风机转动;所述风机,用于转动产生吸力,以实现所述吸收装置的吸收功能;所述滤网,设置于所述风机与所述尘盒之间,用于将风机吸入的气体中所包含的垃圾隔绝于尘盒中。
14.进一步地,所述清洁装置包括主刷和边刷,所述主刷,设置于所述尘盒的第二存储端口前下方,用于清扫扫地机器人行进路径上的垃圾,以供所述吸收装置吸收;所述边刷,设置于所述扫地机器人底部的一侧,用于将扫地机器人行进路径上侧边的垃圾归集以供所述主刷清扫。
15.进一步地,所述扫地机器人还包括灰尘指示器,所述灰尘指示器设置于所述尘盒内部,用于在尘盒达到预设容纳阈值时发出提示信号。该技术方案通过设置灰尘指示器,在尘盒达到预设容纳阈值时对机器人进行提示,避免出现尘盒达到容纳阈值后吸收装置和静电吸附装置仍继续对垃圾、灰尘和毛屑进行收集,而尘盒无法接收容纳的情况。
16.进一步地,所述扫地机器人顶盖为可拆卸结构,所述扫地机器人具备两个顶盖,一个顶盖上均匀分布有若干个静电吸附孔,另一个顶盖上不具备静电吸附孔;所述两个顶盖
被配置为替换地安装于所述扫地机器人顶部。该技术方案将扫地机器人的顶盖设置为可替换结构,当没有静电吸附空气中漂浮的灰尘和毛屑的需求时,用户可选择的使用不设有吸附孔的顶盖,使得扫地机器人外观更美观。
附图说明
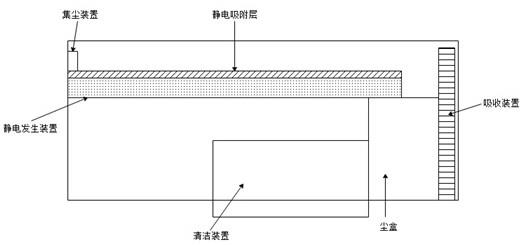
17.图1为本实用新型一种实施例所述扫地机器人的侧面剖视图。
18.图2为本实用新型一种实施例所述扫地机器人的顶视图。
19.图3为本实用新型一种实施例所述尘盒的结构示意图。
20.图4为本实用新型一种实施例所述集尘装置的结构示意图。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清晰,以下将结合附图及实施例,对本实用新型进行描述和说明。应当理解,下面所描述的具体实施例仅仅用于解释本实用新型,并不用于限定本实用新型。此外,还可以理解的是,对本领域的普通技术人员而言,在本实用新型揭露的技术内容上进行一些设计,制造或者生产等变更只是常规的技术手段,不应当理解为本技术公开的内容不充分。
22.除非另作定义,本实用新型所涉及的技术术语或科学术语应当为本技术所属技术领域内具有一般技能的人士所理解的通常意义。本技术所涉及的“一”、“一个”、“一种”、“该”等词语并不表示数量限制,可以表示单数或复数。本技术所涉及的术语“包括”、“包含”、“具有”以及它们任何变形,意图在于覆盖不排他的包含,如:包含了一系列步骤或模块的过程、方法、系统产品或者设备没有限定于已列出的步骤或单元,而是可以还包括没有列出的步骤或模块,或者还可以包括对于这些过程、方法、产品或设备固有的其他步骤或单元。本技术所涉及的术语“第一”、“第二”、“第三”等仅仅是用于区别类似的对应,不代表针对对象的特定排序。
23.本实用新型的一种实施例中提供了一种扫地机器人,如图1所示,该扫地机器人配置有静电吸附装置、清扫装置、吸收装置和尘盒。本实施例所公开的扫地机器人通过设置静电吸附装置实现对扫地机器人上方空气中漂浮的毛屑和灰尘的吸附,避免使用风机直接吸附宠物毛发可能出现伤害宠物皮毛的问题。
24.具体地,如图2所示,所述扫地机器人外壳顶盖上被配置有若干个静电吸附孔,所述静电吸附孔用于实现所述静电吸附装置与扫地机器人外部的连接;所述若干个静电吸附孔按照预设图形均匀分布于顶盖,所述预设图形可以是但不限于环形、双环形、半圆环形、星形、矩形或拟物图形;所述拟物形状是指模拟动物、人物或物体的图形。
25.优选地,所述扫地机器人具备一个以上的顶盖,所述扫地机器人的外壳顶盖为可拆卸结构,可通过顶盖拆卸更换新的顶盖,可将设置有若干个静电吸附孔的顶盖替换为常规不设置有静电吸附孔的顶盖,或者替换为依据用户实际需求进行外观设计的顶盖。
26.所述静电吸附装置被配置于所述扫地机器人的顶盖的若干个静电吸附孔下方,用于产生静电以吸附环境中的灰尘和毛屑。具体地,所述静电吸附装置包括静电发生装置和静电吸附层,所述静电发生装置,设置于所述静电吸附层下方,用于产生静电,为所述静电吸附层提供静电吸附功能;所述静电吸附层,设置于所述静电发生装置的上表面,用于借助
于所述静电发生装置产生的静电吸附空气中漂浮的灰尘和毛屑。
27.优选地,所述静电吸附层为可拆卸地设置于所述静电发生装置的上表面,以便于在所述静电吸附层吸附灰尘和毛屑后,用户可将所述静电吸附层从扫地机器人机身内部拆卸下来进行清洁;所述静电吸附层可以是但不限于是具备较好吸附灰尘和毛屑能力的布料、仿真皮毛等材料。
28.如图3所示,所述尘盒包括两个存储端口和一个倾倒端口,所述两个存储端口分别为第一存储端口和第二存储端口,所述第一存储端口设置于所述尘盒的顶部,用于实现所述尘盒接收所述静电吸附装置吸附的灰尘和毛屑;所述第二存储端口设置于所述尘盒的侧立面,用于实现所述尘盒接收所述吸收装置吸附的垃圾;所述倾倒端口设置于所述尘盒的底部,或者是设置于与所述第二存储端口相对的一侧的尘盒的侧立面,用于倾倒尘盒中存储的灰尘、毛屑和垃圾。需要说明的是,所述倾倒端口为具备开关功能的端口,当用户需要将尘盒中的垃圾进行清理时,通过将倾倒端口打开,实现将尘盒垃圾的倾倒;当倾倒端口处于关闭状态时,倾倒端口所在的尘盒侧立面可以视为无端口侧立面;所述倾倒端口处于打开状态或关闭状态是由用户调节尘盒外侧卡扣决定的,所述尘盒外侧卡扣位于所述倾倒端口所在一侧。
29.所述吸收装置设置于所述扫地机器人机身内部延伸至扫地机器人机身底部,所述吸收装置包括电机、风机和滤网;所述电机,用于提供动力以带动所述风机转动;所述风机,用于依据电机提供的动力进行高速转动并产生吸力,以实现所述吸收装置的吸收功能;所述滤网,设置于所述风机与所述尘盒的第二存储端口之间,用于将风机吸入的气体中所包含的垃圾归集与尘盒中。
30.所述清洁装置设置于凸出于扫地机器人底盘外部的位置,所述清洁装置包括主刷和边刷,所述主刷,设置于所述尘盒的第二存储端口前下方,用于将扫地机器人行进路径上的垃圾进行归集,以供所述吸收装置吸收;所述边刷,设置于所述扫地机器人底部的一侧,用于将扫地机器人行进路径的一侧的垃圾归集以供所述主刷清扫。
31.基于上述实施例,本实用新型的另一种实施例中提供一种扫地机器人还包括灰尘指示器,所述灰尘指示器设置于所述尘盒内部,用于在尘盒达到预设容纳阈值时发出指示信号,以表征尘盒需要清理;其中,所述预设容纳阈值根据不同扫地机器人的尘盒大小及容量设定。
32.基于上述实施例提供的扫地机器人,如图2所示,本实用新型的另一种实施例中提供了一种扫地机器人的所述若干个静电吸附孔包括两种不同半径的静电吸附孔,即图2中的静电吸附孔1和静电吸附孔2,所述两种不同半径的静电吸附孔按照所述预设图形交错的均匀分布于扫地机器人的顶盖,可以理解地,每一个静电吸附孔的半径与其相邻的两个静电吸附孔的半径不同。通过设置两种不同半径的静电吸附孔交错分布于扫地机器人顶盖,使得扫地机器人的静电吸附装置能够更充分的吸附空气中漂浮的毛屑和灰尘,达到更优的吸附效果。可以理解地,所述扫地机器人顶面设置的静电吸附孔可以是相同半径的静电吸附孔,也可以是两种或两种以上不同半径的静电吸附孔,若干个静电吸附孔的分布方式可以依据实际设计需求进行调节,并不限定于不同半径的静电吸附孔交错的均匀分布,还可以是聚集分布等多样的分布方式。
33.基于上述实施例提供的扫地机器人,本实用新型的另一种实施例中提供了一种扫
地机器人的所述静电吸附装置还包括集尘装置,所述集尘装置设置于所述静电吸附层远离所述尘盒的一端,以实现所述扫地机器人的风机未启动时,扫地机器人能够通过所述集尘装置每间隔一段时间将所述静电吸附层吸附的灰尘和毛屑归集至预设指定位置。具体地,所述集尘装置可以是但不限于双齿梳状结构、单齿梳状结构等具备归集灰尘和毛屑的结构;所述预设指定位置可以是但不限于尘盒的第一存储端口。
34.基于上述实施例提供的扫地机器人,本实用新型的另一种实施例中提供了一种扫地机器人的所述集尘装置为t字型齿梳状结构,如图4中的a部分和b部分所示,所述t字型齿梳状结构的集尘装置由顶板和若干个具有凸起的棒状结构组成,用于将静电吸附层上吸附的垃圾归集至预设指定位置,所述预设指定位置与扫地机器人当前执行的工作模式相关联。所述集尘装置的顶部为具有预设宽度的顶板,以避免所述集尘装置对所述静电吸附层的灰尘和毛屑进行归集时,所述灰尘和毛屑扬起,通过静电吸附孔又漂浮在扫地机器人外部空气中;所述棒状结构上均匀分布有凸起,以使得集尘装置实现对静电吸附层上吸附的灰尘和垃圾的归集。其中,所述顶板的预设宽度由所述静电吸附孔的半径的大小和分布情况设定。
35.基于上述实施例所述扫地机器人,本实用新型另一种实施例中提供了一种扫地机器人控制方法,包括:
36.根据当前实际环境需求,从扫地机器人的“清扫模式”、“静电模式”和“静电清扫模式”中选择一种模式控制扫地机器人执行;
37.当扫地机器人处于清扫模式时,所述扫地机器人在行进过程中,启动清扫装置,所述清扫装置利用主刷和边刷将扫地机器人行进路径附近的垃圾归集,所述吸收装置利用电机为风机提供动力,风机产生吸力,将清扫装置归集的垃圾通过所述尘盒的第二存储端口吸入尘盒。需要说明的是,在清扫模式下,所述静电吸附装置处于关闭状态,同时所述尘盒的第一存储端口和倾倒端口处于关闭状态。
38.当扫地机器人处于静电模式时,所述扫地机器人在行进过程中,启动静电吸附装置,所述静电吸附装置利用静电发生器产生静电,将空气中漂浮的灰尘和毛屑吸附于静电吸附层,集尘装置将静电吸附层上吸附的灰尘和毛屑通过尘盒的第一存储端口归集至尘盒。需要说明的是,在静电模式下,所述静电吸附装置处于开启状态,所述清扫装置和所述吸收装置处于关闭状态,同时,所述尘盒的第一存储端口处于开启状态,所述倾倒端口处于关闭状态。
39.当扫地机器人处于静电清扫模式时,所述扫地机器人在行进过程中,同时启动清扫装置和静电吸附装置,所述清扫装置利用主刷和边刷将扫地机器人行走路径附近的垃圾归集,所述静电吸附装置利用静电发生器产生的静电将空气中的灰尘和毛屑吸附于静电吸附层,所述吸收装置每间隔第一预设时间启动一次,每次吸收装置启动时将清扫装置归集的垃圾通过尘盒的第二存储端口吸收入尘盒,同时将静电吸附装置吸附的灰尘和毛屑通过尘盒的第一存储端口吸收入尘盒。具体地,所述第一预设时间是扫地机器人生产前,根据清扫装置和静电吸附装置的实际清扫和吸附效果确定的时间长度。需要说明的是,当扫地机器人处于静电清扫模式时,所述静电吸附装置的集尘装置可以处于关闭状态,由吸收装置将静电吸附层吸附的灰尘和毛屑进行归集,所述静电吸附装置的集尘装置也可以处于开启状态,集尘装置将静电吸附层吸附的灰尘和毛屑归集至尘盒的第一端口附近,以供吸收装
置将其吸入。可以理解地,当集尘装置与吸收装置同时启动时,基于集尘装置对静电吸附层吸附的灰尘和毛屑的归集,吸收装置能够将灰尘和毛屑更好的吸入尘盒,两者的结合使用,能够达到更好的吸尘效果。
40.在本实用新型所提供的实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。
41.上述实施例只为说明本实用新型的技术构思及特点,其目的是让熟悉该技术领域的技术人员能够了解本实用新型的内容并据以实施,并不能以此来限制本实用新型的保护范围。凡根据本实用新型精神实质所作出的等同变换或修饰,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1