清洁机器人的制作方法
1.本实用新型涉及机器人相关技术领域,尤其涉及一种清洁机器人。
背景技术:
2.现有的一种清洁机器人包括机体以及设置在机体的两驱动轮组件、万向轮和拖地组件,其中两驱动轮组件分别设置在机体的左右两侧,两驱动轮组件的驱动轮在清洁机器人的行进方向上相对设置在机体的中部,万向轮在行进方向上设置在机体的前端;拖地组件在行进方向上设置在机体的后部。不过由于该类型的清洁机器人的重心都是位于清洁机器人的前部,这样会导致清洁机器人在某些情况下容易出现抖动的情况。比如,在拖地组件的拖擦件能够旋转的情况下,倘若拖擦件的自身旋转速度过快(例如利用基站进行清洁时拖擦件可以快速旋转),则容易使清洁机器人发生抖动;又比如,在需要利用基站对拖擦件清洁时,由于拖地组件的拖擦件与基站的清洁装置之间通常会较为激烈的相对运动(包括拖擦件不运动的情况),也容易使清洁机器人发生抖动。另外,现有的清洁机器人在包括拖地组件以及位于拖地组件前侧的滚刷组件和尘盒的情况下,电池都是放置在滚刷组件和尘盒的前侧,这样不利于尘盒和滚刷组件的布置。
技术实现要素:
3.本实用新型的目的在于提供一种清洁机器人,能够解决清洁机器人容易出现抖动的问题。
4.本实用新型的另一目的在于提供一种清洁机器人,有利于吸尘组件的尘盒和滚刷组件的布置。
5.为了实现上述目的,本实用新型提供了一种清洁机器人,包括机体以及设置在所述机体的两驱动轮组件和拖地组件,其中,在沿所述清洁机器人的行进方向上,所述机体包括前部、中部和后部;所述机体的左右两侧分别设有所述驱动轮组件,所述驱动轮组件包括驱动轮;在沿所述行进方向上,所述机体的中部相对设有两所述驱动轮,所述机体的后部设有所述拖地组件,所述清洁机器人的重心位于两所述驱动轮的旋转轴心的连线的后侧。
6.由于本实用新型清洁机器人的重心位于两驱动轮的旋转轴心的连线的后侧,相较于清洁机器人的重心位于其前部,有利于抑制清洁机器人容易出现抖动的问题。
7.可选地,所述清洁机器人还包括设置在所述机体的电池,在沿所述行进方向上,所述电池的重心位于两所述驱动轮的旋转轴心的连线的后侧。
8.可选地,在沿所述行进方向上,所述机体的尾部或者所述拖地组件的前侧设有所述电池。
9.可选地,所述清洁机器人还包括滚刷组件,在左右方向上,所述滚刷组件至少部分与两所述驱动轮重合,在沿所述行进方向上,所述拖地组件和所述滚刷组件之间设有所述电池。
10.可选地,所述滚刷组件包括滚刷壳、滚刷以及滚刷驱动电机,所述滚刷设置在所述
滚刷壳内,在沿所述行进方向上,所述滚刷壳的一端的后侧设有所述滚刷驱动电机,在所述左右方向上,所述滚刷驱动电机至少部分与所述电池重合。
11.可选地,所述拖地组件包括拖擦件,所述拖擦件的上方设有所述电池;在上下方向上,所述电池至少部分与所述拖擦件重合。
12.可选地,所述拖地组件包括拖地模块和压力模块;所述拖地模块在上下方向上可浮动,在所述拖地模块对地面进行清洁时,所述压力模块被配置为向所述拖地模块施加向下的力并使所述机体的后部承受向上的反作用力。
13.可选地,所述拖地组件包括拖地模块和旋转驱动模块,所述旋转驱动模块用于驱动所述拖地模块旋转。
14.可选地,所述机体的后部的左右两侧并列设有两所述拖地模块,所述拖地模块能够在所述旋转驱动模块的驱动下绕竖直轴线旋转;在沿所述行进方向上,所述清洁机器人的重心位于两所述拖地模块的旋转轴心的连线的前侧。
15.可选地,所述清洁机器人的重心位于所述拖地组件在水平面的投影的外接矩形区域。
16.可选地,所述拖地组件包括用于对地面进行清洁的拖擦件;所述清洁机器人还包括设置在所述机体的万向轮,在沿所述行进方向上,所述拖擦件的后侧设有所述万向轮,所述万向轮在行进过程中为所述清洁机器人提供支撑。
17.可选地,两所述驱动轮和所述万向轮呈等腰三角形布置;在上下方向上,所述清洁机器人的重心位于所述等腰三角形的范围内。
18.可选地,所述拖地组件包括两个所述拖擦件,两所述拖擦件并列设置在所述机体的左右两侧且能够在旋转驱动模块的驱动下绕竖直轴线旋转;两所述拖擦件的后侧之间形成有间隙,在沿所述行进方向上,所述万向轮至少部分位于所述间隙。
19.可选地,所述清洁机器人还包括设置在所述机体的滚刷组件和吸尘组件,所述吸尘组件包括尘盒,在沿所述行进方向上,所述滚刷组件的前侧设有所述尘盒,所述滚刷组件的后侧设有所述拖地组件。
20.可选地,所述清洁机器儿还包括配重块,在沿所述行进方向上,所述机体的尾部设有所述配重块。
21.为了实现上述另一目的,本实用新型提供了一种清洁机器人,包括机体以及设置在所述机体上的行走组件、拖地组件、滚刷组件、吸尘组件和电池,所述吸尘组件包括尘盒,所述滚刷组件用于将地面的垃圾扫起,所述尘盒用于接收所述滚刷组件扫起的垃圾;其中,在沿所述清洁机器人的行进方向上,所述滚刷组件和所述尘盒的后侧设有所述拖地组件和所述电池。
22.由于电池设置在滚刷组件和尘盒的后侧,使得电池无需占用机体的前侧区域,进而有利于尘盒和滚刷组件的布置。同时,电池作为清洁机器人的具有较大重量的组成部分,将其设置在滚刷组件和尘盒的后侧,相较电池设置在滚刷组件和尘盒的前侧,也有利于改变清洁机器人的重心位置。
23.可选地,所述行走组件包括两驱动轮;在沿所述行进方向上,所述机体的中部相对设有两所述驱动轮,所述电池的重心位于两所述驱动轮的旋转轴心的连线的后侧。
24.可选地,所述拖地组件包括用于对地面进行清洁的拖擦件;所述清洁机器人还包
括设置在所述机体的万向轮;在沿所述行进方向上,所述拖擦件的后侧设有所述万向轮,所述万向轮在行进过程中为所述清洁机器人提供支撑。
25.可选地,所述电池的重心位于所述拖地组件在水平面的投影的外接矩形区域。
26.可选地,在沿所述行进方向上,所述拖地组件的前侧或者后侧设有所述电池。
27.可选地,所述拖地组件包括拖擦件,所述拖擦件的上方设有所述电池;在上下方向上,所述电池至少部分与所述拖擦件重合。
28.可选地,所述清洁机器人还包括设置在所述机体的雷达组件,所述雷达组件的下方设有所述电池,在上下方向上,所述电池至少部分与所述雷达组件重合。
29.可选地,所述拖地组件包括拖地模块和压力模块;所述拖地模块在上下方向上可浮动,在所述拖地模块对地面进行清洁时,所述压力模块被配置为向所述拖地模块施加向下的力并使所述机体的后部承受向上的反作用力。
30.可选地,所述拖地组件包括拖地模块和旋转驱动模块,所述旋转驱动模块用于驱动所述拖地模块旋转。
附图说明
31.图1显示了本实用新型实施例清洁机器人的立体结构示意图。
32.图2是图1显示清洁机器人隐藏部分结构后的的仰视图。
33.图3是图1显示清洁机器人隐藏部分结构后的另一视角的立体结构示意图。
34.图4是图1显示的清洁机器人的剖面图。
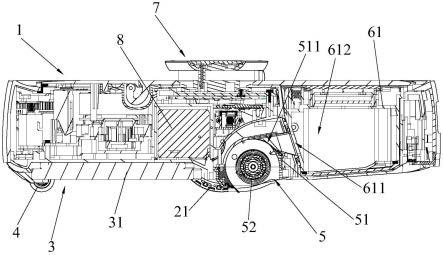
35.图5是图1显示的清洁机器人的另一剖面图。
36.图6是本实用新型实施例尘盒的立体结构示意图。
37.图7是本实用新型另一实施例的拖地组件的剖面结构示意图。
具体实施方式
38.为了详细说明本实用新型的技术内容、构造特征、实现的效果,以下结合实施方式并配合附图详予说明。
39.本实用新型中,“行进方向”指的是清洁机器人于水平面沿直线前进时的方向,方位词“前”、“后”、“左”、“右”、“上”、“下”皆是以清洁机器人处于行进方向时进行定义,其中“前”指的是与行进方向相同的方向,“后”指的是与行进方向相反的方向。
40.另外,本领域技术人员可以理解的是,本实用新型中提到的类似“a的前侧设有b”、“c设置在d的后侧”、“b设置在a和c之间”的表述,并不应进行绝对化解释(如b位于a整体的前侧),比如,“滚刷组件5的前侧设有尘盒61”,但尘盒61位于滚刷组件5的两摆臂512之间。
41.本实用新型公开了一种清洁机器人,能够对地面进行清洁作业。为了便于理解,下面结合图1至图7,来详细说明本实用新型所提供的清洁机器人具体结构及工作原理等。
42.如图1至图5所示,清洁机器人包括机体1以及设置在机体1的两驱动轮组件2和拖地组件3。
43.其中,在清洁机器人的行进方向上,机体1包括前部、中部和后部;机体1的左右两侧分别设有驱动轮组件2,驱动轮组件2包括驱动轮21;在沿行进方向上,机体1的中部相对设有两驱动轮21,机体1的后部设有拖地组件3,清洁机器人的重心位于两驱动轮21的旋转
轴心的连线的后侧。
44.由于本实用新型清洁机器人的重心在行进方向上位于两驱动轮21的旋转轴心的连线的后侧,相较于清洁机器人的重心位于其前部,有利于抑制清洁机器人容易出现抖动的问题。
45.本实施例中,机体1的前部、中部和后部按照清洁机器人的行进方向进行划分,其中可以将两驱动轮21在沿行进方向上所处的位置定义为机体1的中部。可以理解的是,上述所指的“拖地组件3位于机体1的后部”并不限制其整体都必须位于两驱动轮21的后侧,不排除两者在左右方向上是可以部分重合的,比如拖地组件3的拖布在沿行进方向上可以局部伸至两驱动轮21之间。
46.另外,“机体1的中部相对设有两驱动轮21”并非意味着一定是对应几何中心设置。比如,在图1显示的示例中,机体1呈圆形,此时两驱动轮21的旋转轴心的连线可以位于与行进方向垂直的直径处,也可以是相对与行进方向垂直的直径向前或向后偏移适当距离,甚至不排除两驱动轮21的旋转轴心的连线与行进方向不垂直的情况。
47.请参阅图7,拖地组件3包括拖地模块30和压力模块35;拖地模块30在上下方向上可浮动,在拖地模块30对地面进行清洁时,压力模块35被配置为向拖地模块30施加向下的力并使机体1的后部承受向上的反作用力。不考虑其他因素影响,理论上来讲,拖地模块30对水平地面进行清洁时,地面受到的压力等于拖地模块30的重力加上压力模块35的向下压力,相应的,地面会对拖地模块30施加同样大小的向上反作用力,其中一部分会通过压力模块35向上作用于机体1的后部。而由于清洁机器人的重心在沿行进方向上位于两驱动轮21的旋转轴心的连线的后侧,使得拖地模块30对水平地面进行清洁时,清洁机器人的后部具有更大的重力分配(相较清洁机器人的重心设置在其前部),在抵消掉压力模块35施加的反作用力后,仍然具有一定程度的向下的力,从而能够避免由于清洁机器人的重心在其前部而导致的清洁机器人的后部容易翘起的情况。
48.在一些实施例中,压力模块35包括弹性件351,弹性件351设置在机体1与拖地模块30之间,当清洁机器人对地面进行清洁时,拖地模块30由于受到地面的推动上移而使弹性件351储存弹性势能。此时地面受到的压力等于拖地模块30的重力加上弹性件351作用于拖地模块30的向下弹力,而地面的反作用力一部分通过弹性件351作用于机体1的后部。
49.应该注意的是,“弹性件351设置在机体1与拖地模块30之间”并非限制为直接设置在机体1与拖地模块30之间。比如,在图7显示的实施例中,拖地组件3还包括用于驱动拖地模块30旋转的旋转驱动模块32,拖地模块30轴向可移动地连接在旋转驱动模块32的输出端,弹性件351设置在拖地模块30与旋转驱动模块32的输出端之间。弹性件351处于压缩状态时,弹性件351的弹力直接作用于旋转驱动模块32并传递给机体1。
50.可以理解的是,在不同的实施例中,拖地模块的组成可以有所不同,比如,在有的实施例中,拖地模块可以包括拖擦件和与拖擦件连接的转轴,转轴与旋转驱动模块连接且在轴向上可相对旋转驱动模块移动,此时作为压力模块的弹性件可以设置在拖擦件与旋转驱动模块之间,也可以设置在转轴与机体之间,或者以其他方式设置;在另一些实施例中,拖地模块可以包括拖擦件而不包括与拖擦件连接且可相对旋转驱动模块轴向移动的转轴,此时作为压力模块的弹性件可以设置在拖擦件与旋转驱动模块之间,当然也不排除以其他方式设置。另外,拖地模块对水平地面进行清洁时,可以是绕竖直轴线旋转,也可以是绕水
平轴线旋转,或者是没有相对运动,等等。
51.可以理解的是,压力模块并不限制为弹性件,也可以是能够起到类似效果的结构。
52.总之,上述压力模块的形式和设置方式可以有不同的方案,只要是在清洁机器人进行清洁作业时能够起到向拖地模块施加向下的力并使机体的后部承受向上的反作用力的作用即可。当然,在其他一些实施例中,压力模块对拖地模块向下的力的同时并不一定对机体施加向上的反作用力。
53.请参阅图2和图3,拖地组件3包括拖地模块30和旋转驱动模块32,旋转驱动模块32用于驱动拖地模块30旋转。在清洁机器人的重心位于其前部时,如果拖地模块30的旋转速度过快,容易使清洁机器人出现抖动;比如,当对拖地模块30的拖擦件31进行清洁时,可以利用拖擦件31的快速旋转与基站的清洁装置进行摩擦,此时由于旋转速度过快可能会导致清洁机器人出现抖动;当然,在对拖擦件31进行清洁时,也可以利用拖擦件31与清洁装置之间的共同运动或者单纯利用清洁装置的运动对拖擦件31进行清洁,如果运动较为激烈,也会导致清洁机器人出现抖动。而通过使清洁机器人的重心在沿行进方向上位于两驱动轮21的旋转轴心的连线的后侧,相较于清洁机器人的重心位于其前部,有利于抑制清洁机器人容易出现抖动的情况。
54.应该注意的是,拖地模块30在可以旋转时,并不限制其旋转方式,比如,可以是绕竖直轴线旋转,也可以是绕水平轴线旋转。
55.在一些实施例中,机体1的后部的左右两侧并列设有两拖地模块30,拖地模块30在对水平地面进行清洁时,可以绕竖直轴线旋转。两拖地模块30可以共用同一旋转驱动模块32,也可以由各自独立的旋转驱动模块驱动。
56.具体地,在沿行进方向上,清洁机器人的重心位于两拖地模块30的旋转轴心的连线的前侧。由于清洁机器人的重心在沿行进方向上位于两拖地模块30的旋转轴心的连线的前侧,有利于避免由于清洁机器人的重心过于靠后而导致的影响驱动轮21越障的问题。借由本实用新型清洁机器人的重心设置在两驱动轮21的旋转轴心的连线的后侧以及两拖地模块30的旋转轴心的连线的前侧,既能够解决因为重心在前而导致的清洁机器人容易抖动的问题,又不至于对驱动轮21的越障能力造成较大影响。
57.具体地,拖擦件31包括与旋转驱动模块32连接的转盘311和设置在转盘311上的拖布(图未示)。
58.具体地,两拖擦件31的旋转轴心分别位于两驱动轮21的内侧;拖擦件31的最大旋转半径大于拖擦件31的旋转轴心与同侧(同在左侧或同在右侧)的驱动轮21在沿行进方向上的最小距离,不小于拖擦件31的旋转轴心与同侧的驱动轮21的滚动面的外边沿在左右方向上的距离,以及小于拖擦件31的旋转轴心与同侧的驱动轮21之间的最小距离。借由该技术手段,既有利于结构的紧凑化,又能够利用拖擦件31清洁掉驱动轮21留下的行走痕迹。
59.请结合图3,在一些实施例中,拖地组件3还包括升降驱动模块33,升降驱动模块33用于使拖地模块30抬升或者下降。其中,“使拖地模块下降”并不限定为是直接带动的方式,比如,可以是以拖地模块30失去支撑而落下,只要是由于升降驱动模块33的动作使拖地模块30下降即可。
60.请参阅图2和图3,拖地组件3包括用于对地面进行清洁的拖擦件31;清洁机器人还包括设置在机体1的万向轮4,在沿行进方向上,拖擦件31的后侧设有万向轮4,万向轮4在行
进过程中为清洁机器人提供支撑。由于清洁机器人的重心相对靠后,在拖擦件31的后侧设置为清洁机器人提供导向和支撑的万向轮4,有利于提高清洁机器人的行走稳定性。
61.具体地,拖擦件31设置在两驱动轮21的旋转轴心的连线与万向轮4之间。
62.具体地,两驱动轮21和万向轮4呈等腰三角形布置;在上下方向上,清洁机器人的重心位于等腰三角形的范围内。通过该技术手段,有利于清洁机器人保持平衡状态。
63.具体地,拖地组件3包括两个拖擦件31,两拖擦件31并列设置在机体1的左右两侧且能够在旋转驱动模块32的驱动下绕竖直轴线旋转;两拖擦件31的后侧之间形成有间隙t,在沿行进方向上,万向轮4至少部分位于间隙t。通过该技术手段,有利于清洁机器人的结构紧凑。
64.请参阅图2、图4和图6,清洁机器人还包括设置在机体1的滚刷组件5和吸尘组件6,吸尘组件6包括尘盒61,在沿行进方向上,滚刷组件5和尘盒61的后侧设有拖地组件3。其中,滚刷组件5用于将地面的垃圾扫起,吸尘组件6用于与滚刷组件5配合以将滚刷组件5扫起的垃圾吸入尘盒61内。
65.在一些实施例中,在沿行进方向上,滚刷组件5设置在尘盒61与拖地组件3之间。由于尘盒61相对滚刷组件5较轻,通过将尘盒61设置靠前的位置,有利于使清洁机器人的重心后移。同时将尘盒61靠前设置,也有利于增大尘盒61的尺寸,使其具有更大的存储空间612以能够装有更多垃圾。
66.具体地,清洁机器人还包括设置在机体1的雷达组件7,雷达组件7的下方设有滚刷组件5且在上下方向上至少部分与滚刷组件5重合。通过将尘盒61靠前设置,能够避免尘盒61设置在滚刷组件5后侧时雷达组件7对尘盒61安装空间的限制,进而有利于增大尘盒61的尺寸。
67.在一些实施例中,滚刷组件5包括滚刷壳51、滚刷52及滚刷驱动电机53,其中滚刷壳51上设有集尘口511,集尘口511与尘盒61的吸尘口611对应;滚刷52可转动地设置在滚刷壳51;滚刷驱动电机53用于驱动滚刷52转动以对地面进行清洁。具体地,滚刷驱动电机53设置在滚刷壳51上,当然,并不以此为限。
68.具体地,集尘口511设置在滚刷壳51的前侧上部,滚刷52在清洁地面时的转动方向与驱动轮21沿行进方向行走时的转动方向相同,地面上的垃圾在被带至滚刷壳51的上侧空间后由集尘口511和吸尘口611进入尘盒61。当然,在尘盒61位于滚刷组件5前侧时,并不限制为以该方式进行垃圾的收集。
69.请结合图3,在一些实施例中,吸尘组件6还包括风机62,风机62通过吸尘管63与尘盒61连接以对尘盒61进行抽真空。
70.在具体的示例中,吸尘管63沿一驱动轮组件2的内侧向后延伸且位于滚刷组件5的上方,在沿行进方向上,驱动轮组件2的后侧设有风机62。通过该技术手段,有利于充分利用清洁机器人的安装空间,实现各部件的紧凑布局,有利于减小清洁机器人的体积。
71.在一些实施例中,清洁机器人还包括安装在机体1的边刷组件10,边刷组件10设置在尘盒61、滚刷组件5以及驱动轮组件2围设形成的两角落之至少一者。边刷组件10将地面的垃圾扫至滚刷组件5处并利用滚刷组件5和吸尘组件6使垃圾最终收集至尘盒61内。
72.请参阅图2、图4和图5,清洁机器人还包括设置在机体1的电池8,在沿行进方向上,电池8的重心位于两驱动轮21的旋转轴心的连线的后侧。对于清洁机器人来讲,电池8属于
重量较大的部件,因此使电池8的重心位于两驱动轮21的旋转轴心的连线的后侧,相较传统的清洁机器人,有利于使清洁机器人的重心后移。
73.在一些实施例中,在沿行进方向上,拖地组件3的前侧设有电池8,从而有利于清洁机器人的重心不会过于远离两驱动轮21的旋转轴心的连线,进而影响清洁机器人越障。当然,并不限制于此。比如,在沿行进方向上,拖地组件3的后侧(即机体1的尾部)设有电池8,该方案有利于使清洁机器人的重心后移。
74.具体地,两驱动轮21的旋转轴心的连线与拖地组件3之间设有电池8。
75.在一些实施例中,拖地组件3包括拖擦件31,拖擦件31的上方设有电池8;在上下方向上,电池8至少部分与拖擦件31重合。由此可以将电池8至少部分设置在拖擦件31的上方的空间,进而有利于充分利用机体1的安装空间,提升整体结构的紧凑化。
76.具体地,拖地组件3还包括能够使拖擦件31升降和/或绕竖直轴线旋转的驱动模块,在沿行进方向上,驱动模块的前侧设有电池8且与电池8至少部分重合。也就是说,拖擦件31向前超出驱动模块,由此可以将电池8至少部分设置在驱动模块的前侧与拖擦件31的上方之间的空间,进而有利于充分利用机体1的安装空间。当然,这里电池8并不限制为设置在驱动模块的前侧,比如,在沿行进方向上,电池8也可以设置在驱动模块的后侧且与驱动模块至少部分重合。
77.在具体的示例中,驱动模块包括旋转驱动模块32和升降驱动模块33,拖擦件31同时具有升降和旋转的功能。
78.在一些实施例中,清洁机器人还包括滚刷组件5,在左右方向上,滚刷组件5至少部分与两驱动轮21重合,在沿行进方向上,拖地组件3和滚刷组件5之间设有电池8。由于电池8在沿行进方向上设置在拖地组件3和滚刷组件5之间,有利于提升清洁机器人的空间利用率,减小清洁机器人的体积。
79.进一步地,滚刷组件5包括滚刷壳51、滚刷52以及滚刷驱动电机53,滚刷设置在滚刷壳51内,在沿行进方向上,滚刷壳51的一端的后侧设有滚刷驱动电机53,在左右方向上,滚刷驱动电机53至少部分与电池8重合。由于在左右方向上滚刷驱动电机53至少部分与电池8重合,能够进一步提升清洁机器人的空间利用率,减小清洁机器人的体积。
80.在具体的示例中,在上下方向上,滚刷驱动电机53至少部分与可竖向旋转的拖擦件31重合,以充分利用空间。
81.请参阅图3,清洁机器人还包括配重块9,在沿行进方向上,机体1的尾部设有配重块9。借由在机体1的尾部设置配重块9,能够以较小重量的配重块9使清洁机器人的重心后移,有利于根据需要准确调整清洁机器人的重心位置。具体而言,机体1的尾部为机体1最靠后的一部分区域,而机体1的后部除了可以包括机体1的尾部,还可以包括尾部前侧的一部分区域。
82.在一些实施例中,清洁机器人的重心位于拖地组件3在水平面的投影的外接矩形区域r。通过该技术手段,当拖地组件3依靠清洁机器人的重力对地面施压时,有利于增大拖地组件3对地面的压力,进而有利于改善拖地效果。
83.继续结合图1至图7,本实用新型实施例公开了一种清洁机器人,包括机体1以及设置在机体1上的行走组件、拖地组件3、滚刷组件5、吸尘组件6和电池8,吸尘组件6包括尘盒61,滚刷组件5用于将地面的垃圾扫起,尘盒61用于接收滚刷组件5扫起的垃圾;其中,在沿
清洁机器人的行进方向上,滚刷组件5和尘盒61的后侧设有拖地组件3和电池8。这里的“行走组件”可以但不限于是驱动轮组件2,比如还可以是履带组件。
84.由于在沿行进方向上滚刷组件5和尘盒61的后侧设有电池8,使得电池8无需占用机体1的前侧区域,进而有利于尘盒61和滚刷组件5的布置。
85.同时,电池8作为清洁机器人的具有较大重量的组成部分,将其设置在滚刷组件5和尘盒61的后侧,相较电池8设置在滚刷组件5和尘盒61的前侧,也有利于改变清洁机器人的重心位置。当需要使清洁机器人的重心后移时,通过上述布置,容易满足需要。
86.在沿行进方向上,拖地组件3的前侧或者后侧设有电池8。也就是说,电池8根据布局需要,既可以设置在拖地组件3的前侧,也可以设置在拖地组件3的后侧。当拖地组件3的后侧设有电池8时,更加有利于使清洁机器人的重心后移。
87.在一些实施例中,拖地组件3包括拖擦件31,拖擦件31的上方设有电池8,在上下方向上,电池8至少部分与拖擦件31重合,从而有利于充分利用机体1的安装空间,提升整体结构的紧凑化。
88.具体地,拖地组件3还包括能够使拖擦件31升降和/或绕竖直轴线旋转的驱动模块,拖擦件31连接在驱动模块的底端;在沿行进方向上,驱动模块的前侧设有电池8,且电池8至少部分与驱动模块重合。也就是说,拖擦件31向前超出驱动模块,由此可以将电池8至少部分设置在驱动模块的前侧与拖擦件31的上方之间的空间,进而有利于充分利用机体1的安装空间,提升整体结构的紧凑化。当然,这里电池8并不限制为设置在驱动模块的前侧,比如,在沿行进方向上,电池8也可以设置在驱动模块的后侧且与驱动模块至少部分重合。
89.在具体的示例中,驱动模块包括旋转驱动模块32和升降驱动模块33,拖擦件31同时具有升降和旋转的功能。
90.进一步地,在沿行进方向上,滚刷组件5的前侧设有尘盒61,拖地组件3和滚刷组件5之间设有电池8。将尘盒61设置在机体1的前部,有利于增大尘盒61的尺寸,使其具有更大的存储空间以能够装有更多垃圾。由于尘盒61相对滚刷组件5较轻,通过将尘盒61设置在滚刷组件5的前侧,有利于使清洁机器人的重心后移。具体地,滚刷组件5包括向前伸出的两摆臂512,两摆臂512摆动连接至机体1以使滚刷组件5可上下摆动。尘盒61的下部位于两摆臂512之间,进而有利于结构的紧凑化。
91.在一些实施例中,滚刷组件5包括滚刷壳51、滚刷52以及滚刷驱动电机53,滚刷52设置在滚刷壳51内,在沿行进方向上,滚刷壳51的一端的后侧设有滚刷驱动电机53,在左右方向上,滚刷驱动电机53至少部分与电池8重合。由于滚刷驱动电机53在左右方向上至少部分与电池8重合,能够进一步提升清洁机器人的空间利用率,减小清洁机器人的体积。
92.具体地,在上下方向上,滚刷驱动电机53至少部分与可竖向旋转的拖擦件31重合,以充分利用空间。
93.在一些实施例中,行走组件包括两驱动轮21;在沿行进方向上,机体1的中部相对设有两驱动轮21,电池8的重心位于两驱动轮21的旋转轴心的连线的后侧。由于传统的清洁机器人的重心都在两驱动轮21的旋转轴心的连线的前侧,本实用新型使电池8的重心位于两驱动轮21的旋转轴心的连线的后侧,相较传统的清洁机器人,有利于使清洁机器人的重心后移。
94.在一些实施例中,拖地组件3包括用于对地面进行清洁的拖擦件31;清洁机器人还
包括设置在机体1的万向轮4,在沿行进方向上,拖擦件31的后侧设有万向轮4,万向轮4在行进过程中为清洁机器人提供支撑。由于清洁机器人的重心相对传统清洁机器人靠后,在拖擦件31的后侧设置为清洁机器人提供导向和支撑的万向轮4,有利于提高清洁机器人的行走稳定性。
95.具体地,拖擦件31设置在两驱动轮21的旋转轴心的连线与万向轮4之间。
96.在一些实施例中,清洁机器人还包括设置在机体1的雷达组件7,雷达组件7的下方设有电池8,在上下方向上,电池8至少部分与雷达组件7重合,借此有利于结构的紧凑化。具体地,雷达组件7的后部与电池8的至少部分在上下方向上重合。进一步地,在沿行进方向上,尘盒61的后侧设有滚刷组件5,雷达组件7的前部与滚刷组件5的至少部分在上下方向上重合,从而更加有利于结构的紧凑化。
97.在一些实施例中,电池8的重心位于拖地组件3在水平面的投影的外接矩形区域。通过该技术手段,当拖地组件3依靠清洁机器人的重力对地面施压时,有利于增大拖地组件3对地面的压力,进而有利于改善拖地效果。
98.在一些实施例中,拖地组件3包括拖地模块30和压力模块35;拖地模块30在上下方向上可浮动,在拖地模块30对地面进行清洁时,压力模块35被配置为向拖地模块30施加向下的力并使机体1的后部承受向上的反作用力。由于电池8的位置设置容易使清洁机器人的重心后移,使得清洁机器人的后部具有更大的重力分配(相较传统的清洁机器人),在抵消掉压力模块35施加的反作用力后,仍然具有一定程度的向下的力,从而能够避免由于清洁机器人的重心在其前部而导致的清洁机器人的后部容易翘起的情况。
99.在一些实施例中,拖地组件3包括拖地模块30和旋转驱动模块32,旋转驱动模块32用于驱动拖地模块30旋转。由于电池8的位置设置,有利于清洁机器人的重心后移,进而能够缓解由于拖地模块30旋转过快或者与基站的清洁装置的相对旋转过快而导致的清洁机器人容易抖动的问题。
100.以上所揭露的仅为本实用新型的较佳实例而已,其作用是方便本领域的技术人员理解并据以实施,当然不能以此来限定本实用新型的之权利范围,因此依本实用新型的申请专利范围所作的等同变化,仍属于本实用新型的所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1