一种智能清洁机器人自清洁吸拖一体化机构的制作方法
1.本实用新型涉及清洁机器人技术领域,具体是一种智能清洁机器人自清洁吸拖一体化机构。
背景技术:
2.清洁机器人是为人类服务的特种机器人,主要从事家庭卫生的清洁、清洗等工作,具有扫地省时、省力、低噪音和轻便小巧等优点。
3.随着人们生活质量的提高,清洁机器人越来越多的出现于人们的生活之中,现有的清洁机器人中,参考专利文件cn209463923u,此专利文件提出的方案中,只对机器人的移动进行了优化,同时能够进行清扫,但单纯的清扫并不能对底面进行彻底清洁,不利于机器人提高工作效率;为此,我们提供了一种智能清洁机器人自清洁吸拖一体化机构解决以上问题。
技术实现要素:
4.本实用新型的目的就是为了弥补现有技术的不足,提供了智能清洁机器人自清洁吸拖一体化机构。
5.为实现上述目的,本实用新型提供如下技术方案:一种智能清洁机器人自清洁吸拖一体化机构,包括底座,所述底座的上部设置有清扫机构,所述底座的上部设置有拖地机构,所述底座的两侧均设置有移动机构。
6.进一步的,所述清扫机构包括一个第一旋转电机、一个清扫组、两个第一传动带、一个吸风道和一个吸尘器,所述第一旋转电机固定连接于所述底座的上表面,所述清扫组固定连接于所述底座的底面,所述吸风道固定连接于所述底座的上表面,所述吸风道的下端贯穿所述底座的上表面并延伸至所述底座的下方,所述吸尘器固定连接于所述底座的上表面。
7.进一步的,所述第一旋转电机的两个输出轴端均固定连接有第一主动齿轮,所述清扫组的两端均固定连接有第一从动齿轮,所述第一主动齿轮通过所述第一传动带与所述第一从动齿轮传动连接,所述吸风道的背面与所述吸尘器的正侧面相连通,所述吸风道的下端连通有收集口。
8.进一步的,所述拖地机构包括一个第二旋转电机、两个轴承,一个第二传动带和两个水泵,所述第二旋转电机固定连接于所述底座的上表面,两个所述轴承均转动连接于所述底座的上表面。
9.进一步的,两个所述轴承的下端均贯穿所述底座的上表面并延伸至所述底座的下方,两个所述水泵均固定连接于所述底座的上表面,所述第二旋转电机额度输出轴端固定连接有第二主动齿轮,两个所述轴承的上表面均固定连接有第二从动齿轮。
10.进一步的,两个所述第二从动齿轮均通过所述第二传动带与所述第二主动齿轮传动连接,两个所述轴承的底面均固定连接有拖地组,两个所述水泵的正侧面均连通有导水
管,两个所述导水管均贯穿所述底座的上表面并延伸至所述底座的下方,两个所述导水管远离所述水泵的一端均连通有洒水头。
11.进一步的,所述移动机构包括第三旋转电机、固定板、第三传动带和第四传动带,所述第三旋转电机固定连接于所述底座的上表面,所述固定板固定连接于所述底座的底面,所述第三旋转电机的输出轴端固定连接有第三主动齿轮,所述固定板远离所述底座的一侧面转动连接有主动滚轴,所述主动滚轴远离所述固定板的一侧面固定连接有中介齿轮组。
12.进一步的,所述中介齿轮组通过所述第三传动带与所述第三主动齿轮传动连接,所述固定板远离所述底座的一侧面转动连接有四个从动滚轴,每个所述从动滚轴远离所述底座的一侧面均固定连接有第三从动齿轮,四个所述第三从动齿轮均通过所述第四传动带与所述中介齿轮组传动连接。
13.与现有技术相比,该智能清洁机器人自清洁吸拖一体化机构具备如下有益效果:
14.1、本实用新型通过设置清扫机构,能够对机器人经过的底面进行全面清扫并收集灰尘,有效的提高了设备的清扫效率,通过设置拖地机构,可对设备清扫过的地面进行擦洗,有效的清除了地面粘附力较强的污垢,通过设置移动机构,能够对设备进行快捷移动和转向,进一步的提高了设备的清洁效率。
15.2、本实用新型通过设置吸尘器,可对清扫机构清扫的垃圾进行集中收集,方便垃圾处理,通过设置洒水头,可对地面进行快速洒水,在方便拖地机构擦洗的同时可降低清扫机构产生的扬尘,通过设置两个第三旋转电机,可实现两个第三旋转电机不同步运转进行转向,提高设备的灵活性。
附图说明
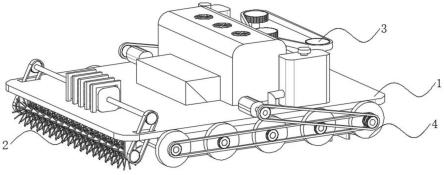
16.图1为本实用新型立体结构的正视示意图;
17.图2为本实用新型清扫机构的立体结构示意图;
18.图3为本实用新型拖地机构的立体结构示意图;
19.图4为本实用新型移动机构的立体结构示意图。
20.图中:1、底座;2、清扫机构;201、第一旋转电机;202、清扫组;203、第一传动带;204、吸风道;205、吸尘器;206、第一主动齿轮;207、第一从动齿轮;208、收集口;3、拖地机构;301、第二旋转电机;302、轴承;303、第二传动带;304、水泵;305、第二主动齿轮;306、第二从动齿轮;307、拖地组;308、导水管;309、洒水头;4、移动机构;401、第三旋转电机;402、固定板;403、第三传动带;404、第四传动带;405、第三主动齿轮;406、主动滚轴;407、中介齿轮组;408、从动滚轴;409、第三从动齿轮。
具体实施方式
21.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
22.本实施例提供了一种智能清洁机器人自清洁吸拖一体化机构,该装置能够对清扫过的地面进行擦洗,进一步提高了设备的清洁效率。
23.参见图1~图4,一种智能清洁机器人自清洁吸拖一体化机构,包括底座1,此处底
座1为设备的整体支撑结构,底座1的棱角处应经过钝化处理,避免设备在移动的过程中因为底座1的棱角损坏其他物品或误伤人员。
24.底座1的上部设置有清扫机构2,清扫机构2为设备的干式垃圾收集装置,其目的时先行把较大的垃圾进行清除,方便后续结构进行进一步清洁。
25.在这里,清扫机构2包括一个第一旋转电机201、一个清扫组202、两个第一传动带203、一个吸风道204和一个吸尘器205,第一旋转电机201固定连接于底座1的上表面,清扫组202固定连接于底座1的底面,吸风道204固定连接于底座1的上表面,吸风道204的下端贯穿底座1的上表面并延伸至底座1的下方,吸尘器205固定连接于底座1的上表面。
26.同时,第一旋转电机201的两个输出轴端均固定连接有第一主动齿轮206,清扫组202的两端均固定连接有第一从动齿轮207,第一主动齿轮206通过第一传动带203与第一从动齿轮207传动连接,吸风道204的背面与吸尘器205的正侧面相连通,吸风道204的下端连通有收集口208。
27.能够通过第一旋转电机201带动清扫组202旋转,实现扫地的目的,同时利用吸风道204和吸尘器205进行吸取,能够将垃圾吸进吸尘器205的内部集中处理,此处吸尘器205为现有垃圾吸取设备。
28.底座1的上部设置有拖地机构3,拖地机构3则为深度清洁设备,能够对底面进行湿式清洁,进一步提高了设备的清洁效率,使设备清洁更加彻底。
29.本实施例中,拖地机构3包括一个第二旋转电机301、两个轴承302,一个第二传动带303和两个水泵304,第二旋转电机301固定连接于底座1的上表面,两个轴承302均转动连接于底座1的上表面。
30.进一步的,两个轴承302的下端均贯穿底座1的上表面并延伸至底座1的下方,两个水泵304均固定连接于底座1的上表面,第二旋转电机301额度输出轴端固定连接有第二主动齿轮305,两个轴承302的上表面均固定连接有第二从动齿轮306。
31.更进一步的,两个第二从动齿轮306均通过第二传动带303与第二主动齿轮305传动连接,两个轴承302的底面均固定连接有拖地组307,两个水泵304的正侧面均连通有导水管308,两个导水管308均贯穿底座1的上表面并延伸至底座1的下方,两个导水管308远离水泵304的一端均连通有洒水头309。
32.能够通过洒水头309对底面进行洒水,实现降尘和地面湿润的目的,同时能够通过第二旋转电机301带动两个拖地组307对地面进行擦洗,进一步强化了设备对地面的清洁效果。
33.底座1的两侧均设置有移动机构4,移动机构4为设备驱动装置,实现设备进行自主移动,来扩大设备的清扫面积,同时能够转向,使装置的机动性较高。
34.详细的,移动机构4包括第三旋转电机401、固定板402、第三传动带403和第四传动带404,第三旋转电机401固定连接于底座1的上表面,固定板402固定连接于底座1的底面,第三旋转电机401的输出轴端固定连接有第三主动齿轮405,固定板402远离底座1的一侧面转动连接有主动滚轴406,主动滚轴406远离固定板402的一侧面固定连接有中介齿轮组407。
35.还包括,中介齿轮组407通过第三传动带403与第三主动齿轮405传动连接,固定板402远离底座1的一侧面转动连接有四个从动滚轴408,每个从动滚轴408远离底座1的一侧
面均固定连接有第三从动齿轮409,四个第三从动齿轮409均通过第四传动带404与中介齿轮组407传动连接。
36.能够利用第三旋转电机401带动主动滚轴406旋转,主动滚轴406带动从动滚轴408旋转,实现对设备提供动力加持,使得设备能够自主移动。
37.工作原理:首先,将吸尘器205拆下清理干净,之后将吸尘器205安装于设备之上,然后对水泵304中进行注水,之后开启第一旋转电机201和吸尘器205,第一旋转电机201可通过第一传动带203带动清扫组202旋转,实现地面垃圾的清扫,同时吸尘器205通过吸风道204和收集口208对垃圾灰尘进行吸取,实现垃圾的集中处理,之后开启第二旋转电机301和水泵304,水泵304通过洒水头309将水分洒于地面,实现降尘和地面湿润,第二旋转电机301通过第二传动带303带动两个拖地组307对湿润过的地面进行擦洗,进一步强化了设备的清洁效果,最后开启第三旋转电机401,第三旋转电机401通过第三传动带403带动主动滚轴406旋转,主动滚轴406通过第四传动带404带动从动滚轴408旋转,实现设备的自主移动,在需要进行转向时,关闭相对应的第三旋转电机401,使得设备相对应一侧的移动机构4停止运行,产生差速,实现设备的转向。
38.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1