智能擦玻璃机器人
1.本实用新型涉及一种擦玻璃机器人,具体涉及一种智能擦玻璃机器人,属于智能家居技术领域。
背景技术:
2.随着自动化控制技术和计算机技术的飞速发展,机器人智能化技术越来越成熟,开始逐渐由工业型机器人向服务型机器人领域迈进,这为解决高层窗玻璃的清洗提供了可行性研究方案。人工清洁玻璃不仅效率低、劳动强度大,而且伴有危险性。为确保室内外玻璃清新整洁,采光效果更好,迫切需要设计一款运动灵活、工作效率高的小型擦窗机器人,以此来提高效率,降低劳动强度。对于擦窗机器人的设计研究不仅有着科研上的挑战和魅力,而且具有广泛的市场需求和巨大的经济效益,对提高人类智能化的生活水平具有重要意义和价值。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种智能擦窗玻璃机器人。
4.为解决上述技术问题,本实用新型所采取的技术方案是:
5.一种智能擦玻璃机器人,包括微型水箱、水管、机壳、运动传动系统、结构相同的第一和第二执行单元;机壳上设有排风口;
6.第一执行单元包括第一吸附系统组件、第一清洁轮;
7.第一吸附系统组件包括第一软橡胶吸盘、第一离心风机和第一风道;第一卡盘固定在机壳底端外部;
8.第一软橡胶吸盘的形状为喇叭口形状,其小端口固定在第一卡盘上,其大端口外沿嵌入第一清洁棉的内沿;第一风道固定在机壳内部,其进风口与第一软橡胶吸盘的小端口相通,其排风口与第一离心风机的进风口连通;
9.第一清洁轮由第一微型水泵、第一喷头、第一卡盘和第一清洁棉组成;第一微型水泵固定在下壳上;第一喷头贯穿机壳;第一微型水泵从微型水箱中抽取清洁液,经水管从第一喷头喷出,洒在第一清洁棉上;
10.微型水箱安装在机壳内部,分别连接第一微型水泵和第二微型水泵;
11.运动传动系统包括驱动电机、联轴器、传动轴、结构相同的第一至第二运动传动组件;第一运动传动组件包括第一大齿形带轮、第一小齿形带轮、第一同步带、第一轴;驱动电机固定在机壳内的电机壳,其主轴经联轴器带动传动轴转动;第一小齿形带轮装配在传动轴上,通过第一同步带带动第一大齿形带轮转动;第一大齿形带轮与第一轴通过键连接,第一轴两端分别固定在机壳的侧壁上;第一轴底端开有螺纹小孔,与第一卡盘固定连接;
12.控制系统包括控制器和探测模块;控制器的i/o口分别连接驱动电机的驱动器、第一离心风机的驱动器、第二离心风机的驱动器、第一微型水泵的驱动器、第二微型水泵的驱动器、探测模块的输出端、开关按钮。
13.进一步,所述的驱动电机为步进电机。
14.进一步,一种智能擦玻璃机器人还包括电源模块,电源模块连接到控制器相应的引脚,给整个系统中需要供电的设备提供电源。
15.进一步,所述第一同步带第二同步带采用齿形同步带。
16.进一步,所述机壳包括上壳、下壳和内壳;下壳上内部固定安装第一风道、第一微型水泵和第二微型水泵;第一喷头贯穿下壳;内壳上固定安装电机壳;内壳及上壳设有排风口;第一轴两端分别固定在内壳的顶部和下壳的底部;第一卡盘固定连接在第一轴的底端,位于下壳外部。
17.本实用新型与现有技术相比具有的突出效果为:
18.(1)本实用新型可实现自动清洁窗玻璃,有效减低劳动强度。
19.(2)本实用新型的擦窗机器人,设计合理,性能安全可靠,运行稳固,成本低、故障少、效率高。
20.(3)本实用新型利用控制系统自动控制,在多领域清洁工作中可灵活应用,完全符合行业内迫切的需求。
21.(4)本实用新型应用广泛,具有广阔的市场前景。
附图说明
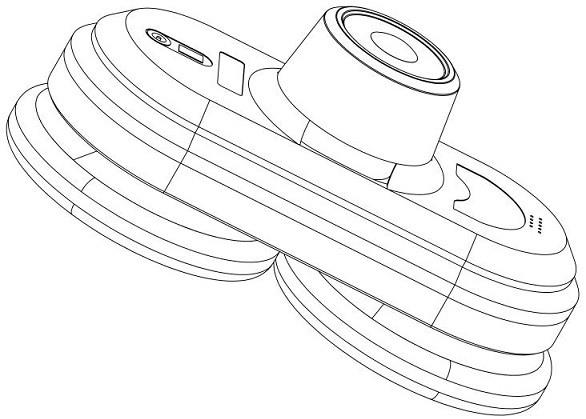
22.附图1为本实用新型的整体结构图;
23.附图2为本实用新型实施例1的剖视图;
24.附图3为本实用新型实施例1的内部结构图;
25.附图4为本实用新型实施例1的运动传动系统结构图;
26.附图5为本实用新型实施例1的第一执行单元结构图;
27.图中:1-第一清洁棉;2-第一卡盘;3-下壳;4-内壳;5-上壳;6-第一大同步轮;7-第一单向轴承;8-第一卡簧;9-第一法兰轴承;10-第一轴;11-第一圆头螺钉;12-第一同步带;13-第二圆头螺钉;14-驱动电机;15-联轴器;16-第三圆头螺钉;17-电机座;18-传动轴;19-第四圆头螺钉;20-第二同步带;21-第二卡簧;22-第二法兰轴承;23-第二轴;24-第二单向轴承;25-第二大同步轮;26-第二风道;27-水管;28-第二卡盘;29-第二清洁棉;30-第三卡簧;31-第五圆头螺钉;32-第二软橡胶吸盘;33-第三法兰轴承;34-第一小同步轮;35-第四卡簧;36-第四法兰轴承;37-第二小同步轮;38-第一离心风机;39-第一软橡胶吸盘;40-第一风道;41-第六圆头螺钉;42-第五卡簧;43-第五法兰轴承;44-微型水箱;45-第二离心风机;46-第七圆头螺钉;47-第八圆头螺钉;48-第一沉头螺钉;49-第二沉头螺钉;50-第二微型水泵;51-第三沉头螺钉;52-第二喷头;53-第一微型水泵;54-第四沉头螺钉;55-第一喷头。
具体实施方式
28.实施例1:
29.参照图1~图5,一种智能擦玻璃机器人,包括机壳、结构相同的第一和第二执行单元、运动传动系统、微型水箱44、水管27。
30.机壳包括上壳5、下壳3和内壳4。上壳5和内壳4起防护作用,下壳3起支撑作用。
31.第一执行单元包括第一吸附系统组件、第一清洁轮。第一吸附系统组件包括第一软橡胶吸盘39、第一离心风机38和第一风道40;第一卡盘2固定在下壳3的外部;第一软橡胶吸盘的39的形状为喇叭口形状,其小端口固定在第一卡盘2上,其大端口外沿嵌入第一清洁海绵1的内沿,保证了吸附过程密封性可靠。第一风道40固定在下壳3上,其进风口与第一软橡胶吸盘39的小端口相通,其排风口与第一离心风机38的进风口连通。第一离心风机38启动,将第一软橡胶吸盘39中的空气经过第一风道40抽出,再经内壳4上及上壳5上的排风口,排到机壳外部,使第一软橡胶吸盘39的内腔产生负压,吸住玻璃。
32.第一清洁轮由第一微型水泵53、第一喷头55、第一卡盘2和第一清洁棉1组成,为工作执行部件。第一微型水泵53固定在下壳3上。第一喷头52贯穿下壳3。第一微型水泵53从微型水箱44中抽取清洁液,经水管27从第一喷头52喷出,洒在第一清洁棉1上。第一清洁棉1与玻璃紧密接触并作相对运动来执行清洁任务。
33.微型水箱44安装在下壳3上,位于第二离心风机45侧面,分别连接第一微型水泵53和第二微型水泵50。
34.运动传动系统包括驱动电机14、联轴器15、传动轴18、结构相同的第一至第二运动传动组件;第一运动传动组件包括第一大齿形带轮6、第一小齿形带轮37、第一同步带12、第一轴10。驱动电机14固定在内壳4的电机壳17里,其主轴经联轴器15带动传动轴18转动。第一小齿形带轮37装配在传动轴18上。通过第一同步带12带动第一大齿形带轮6转动。第一大齿形带轮6与第一轴10通过键连接,第一轴10顶端固定在内壳4的顶部,其底端开有螺纹小孔,与第一卡盘2通过圆头螺钉固定连接,第一卡盘2上装配第一清洁棉1。当驱动电机14工作旋转时,通过第一运动传动组件传递运动至第一清洁轮,由第一清洁轮完成最后的运动。驱动电机14与传动轴18同步运动。
35.驱动电机14、第一离心风机38、第二离心风机45、第一微型水泵53、第二微型水泵50均由控制系统自动控制运行。控制系统包括控制器和探测模块。控制器的i/o口分别连接驱动电机14的驱动器、第一离心风机38的驱动器、第二离心风机45的驱动器、第一微型水泵53的驱动器、第二微型水泵50的驱动器、探测模块的输出端、开关按钮。探测模块实时感知外部环境,电源模块连接到控制器相应的引脚,给整个系统中需要供电的设备提供电源。开关按钮具有启停功能。
36.本实施例中驱动电机14采用步进电机,但不仅限于步进电机。第一同步带12和第二同步带20采用齿形同步带,保证传运的平稳性。
37.以上所述的实施例仅为本实用新型的个别实施例,并不用以限制本实用新型的保护范围,凡采用等同替换或等效变换形成的技术方案,以及符合本实用新型的保护主题思路的技术方案,均在本实用新型要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1