清洁基站以及清洁机器人系统的制作方法
1.本实用新型涉及清洁设备的技术领域,特别涉及清洁基站以及清洁机器人系统。
背景技术:
2.清洁基站是一种与清洁机器人配套使用的设备,清洁基站可以对清洁基站执行多种维护工作,清洁基站上可以对清洁机器人的拖擦件(如滚刷、拖布等)进行清洗,清洁基站还可以回收清洁机器人内的灰尘,清洁基站可以对清洁机器执行多种维护工作。
3.清洁基站要对清洁机器人执行多种维护工作,则需要配置多种执行装置,现有的清洁基站上的多种执行装置的安装比较分散,这样不仅易导致整个清洁基站的体积过大,同时还不方便多种执行装置进行维护。
技术实现要素:
4.本实用新型的主要目的是提供一种清洁基站,旨在方便对清洁基站上的零部件进行维护。
5.为实现上述目的,本实用新型提出的一种清洁基站,与清洁机器人配套使用,所述清洁基站包括基座,所述基座上形成有维护工位,所述清洁基站还包括安装于所述维护工位的抽尘装置、抽污液装置、抽清洁液装置、过滤装置、杀菌装置中的至少两种。
6.在本实用新型的一些实施例中,所述基座设置有容纳腔以及与所述容纳腔连通的维护窗口,所述容纳腔形成所述维护工位;
7.所述清洁基站还包括与所述基座连接的维护板,所述维护板用于封盖或者打开所述维护窗口。
8.在本实用新型的一些实施例中,所述维护窗口开设于所述基座的侧表面。
9.在本实用新型的一些实施例中,所述基座包括底座、水箱支架以及后盖,所述水箱支架安装于所述底座的上方,所述后盖用于封盖所述底座的后侧和所述水箱支架的后侧,所述后盖与所述水箱支架共同围设形成所述容纳腔,所述维护窗口开设于后盖。
10.在本实用新型的一些实施例中,所述水箱面对所述后盖的表面部分凹设,以形成供所述抽尘装置、所述抽污液装置、所述抽清洁液装置、所述过滤装置、所述杀菌装置中的至少两种安装的安装凹部,所述后盖封盖所述安装凹部以形成所述容纳腔。
11.在本实用新型的一些实施例中,所述基座形成有供清洁机器人停靠的清洁工位,所述基座还设有位于所述清洁工位下方的污水抽吸口;
12.所述清洁基站还包括装载于所述基座上的储液箱,所述抽清洁液装置的进液端与所述储液箱连通,所述抽清洁液装置的出液端伸至所述清洁工位;
13.所述抽污液装置的进液端与所述污水抽吸口连通,所述抽污液装置的出液端与所述储液箱连通,所述过滤装置串接于所述抽污液装置和所述储液箱连通的管路上。
14.在本实用新型的一些实施例中,所述杀菌装置串接于所述抽污液装置和所述储液箱连通的管路上。
15.在本实用新型的一些实施例中,所述杀菌装置包括臭氧发生器和供气装置,所述臭氧发生器的进气口与所述供气装置管路连通,所述臭氧发生器的出气端与所述抽污液装置和所述储液箱连通的管路连通。
16.在本实用新型的一些实施例中,所述清洁基站还包括三通管,所述三通管具有第一接头以及均与所述第一接头连通的两第二接头,所述第一接头与所述储液箱连通,两所述第二接头中的一个与所述过滤装置的出液端连通,两所述第二接头中的另一个与所述臭氧发生器的出气口连通。
17.在本实用新型的一些实施例中,所述清洁基站还包括单向阀,所述单向阀的一端与所述臭氧发生器的出气口连通,所述单向阀的另一端与所述三通管中对应的第二接头连通。
18.在本实用新型的一些实施例中,所述清洁基站还包括过滤网,所述过滤网设置于所述污水抽吸口。
19.在本实用新型的一些实施例中,所述清洁基站还包括液体检测装置,所述液体检测装置安装于所述抽污液装置和所述储液箱连通的管路上;
20.所述清洁基站还包括与所述液体检测装置和所述抽污液装置电连接的控制装置,所述控制装置根据所述液体检测装置的检测结果控制所述抽污液装置工作。
21.本实用新型还提出一种清洁机器人系统,所述清洁机器人系统包括清洁机器人以及清洁基站,所述清洁基站包括基座,所述基座上形成有维护工位,所述清洁基站还包括安装于所述维护工位的抽尘装置、抽污液装置、抽清洁液装置、过滤装置、杀菌装置中的至少两种。
22.本实用新型通过在清洁基站的基座上设置维护工位,以供清洁基站的抽尘装置、抽污液装置、抽清洁液装置、过滤装置、杀菌装置中的至少两种安装,如此设置,方便对上述各装置进行的维护,同时将上述各装置集成于维护工位,还能够使清洁基站的结构更加紧凑,有利于缩小整个清洁基站的体积。
附图说明
23.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
24.图1为本实用新型清洁基站一实施例的结构示意图;
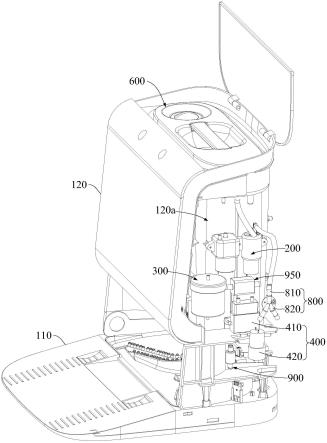
25.图2为图1中清洁基站的另一视图;
26.图3为图1中基座的底座一实施例的结构示意图。
27.附图标号说明:
[0028][0029][0030]
本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0031]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0032]
需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0033]
另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当人认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
[0034]
本实用新型中的清洁机器人系统包括清洁机器人和清洁基站,清洁机器人用于执行清洁工作,清洁基站用于执行维护清洁机器人的工作,为方便对清洁机器人和清洁基站的了解,下面对清洁机器人和清洁基站进行简单的介绍。
[0035]
清洁机器人包括商用清洁机器人和家用清洁机器人,清洁机器人可以是是扫地机器人、拖地机器人、洗地机器人、扫拖一体机等能够自主完成清洁工作的清洁设备,清洁机器人也可以是手持式、遥控式等需要人为操作的半自动完成清洁工作的清洁设备。
[0036]
清洁机器人搭载的拖擦件可以对地板、地毯等待清洁面进行清洁,清洁机器人上的拖擦件可以是圆盘状或近视圆盘等形状的转动拖布,也可以是振动或可上下活动或不动
的平板状拖布。
[0037]
清洁基站可以对清洁机器人充电,可以回收清洁机器人内的灰尘,可以对清洁机器人的拖擦件进行清洁和风干,可以更换清洁机器人的拖擦件,可以对清洁机器人注水,还可以对清洁机器人执行其他动作,在此就不一一列举。
[0038]
请参阅图1和图2,该清洁基站1000包括基座100、抽尘装置(未图示)、抽污液装置200、抽清洁液装置(未图示)、过滤装置300以及杀菌装置400,该抽尘装置、抽污液装置200、抽清洁液装置、过滤装置300以及杀菌装置 400均安装于基座100上。
[0039]
该基座100作为整个清洁基站1000的承载部件,其不仅具有较高的强度,其外观还具有一定的美感,该基座100的形状有很多种,该基座100可以呈圆柱状设置,该基座100可以呈l型设置,该基座100也可以呈c型设置,该基座 100还可以呈其他形状设置,在此不做具体的限定。
[0040]
该基座100上设置有维护工位,该维护工位为该基座100上的某一空间位置,该维护工位可以形成于该基座100的表面,该维护工位可以形成于该基座 100的内部,该维护工位还可以一部分在基座100的内部,一部分在基座100的外部,在此对维护工位具体设置的位置不做限定。
[0041]
该抽尘装置主要用于抽吸清洁机器人的集尘腔内的灰尘、纸屑等杂物,以将清洁机器人的集尘腔内的灰尘、纸屑等杂物回收并集中处理,该抽尘装置可以是气泵、离心风机、贯流风机等能够驱动空气流动的装置,较佳地,该抽尘装置选用离心风机,离心风机具有抽气效果好、噪声低、运行平稳的优点。
[0042]
该抽清洁液装置和抽污液装置200均用于抽取液体,该抽清洁液装置用于将清洁液抽至能够打湿清洁机器人的拖擦件的位置,该抽污液装置200用于回收对清洁机器人的拖擦件清洁的液体。该抽清洁液装置和抽污液装置200可以是水泵、空气泵以及其他能够驱动液体流动的设备,在此就不一一列举。
[0043]
该过滤装置300主要用于对液体进行过滤,该过滤装置300可以用于过滤通过抽清洁液装置的清洁液,该过滤装置300也可以用来过滤通过抽污液装置 200的污液,该过滤装置300还可以同时对通过清洁液装置的清洁液以及抽污液装置200的污液进行过滤,在此不做具体的限定。
[0044]
该过滤装置300可以过滤液体中的颗粒物、悬浮物、有色物质等,该过滤装置300的滤芯可以是单一的活性炭滤芯,该过滤装置300的滤芯可以是过滤棉和活性炭形成的复合滤芯,对于该过滤装置300的滤芯类型,在此就不一一列举。
[0045]
该杀菌装置400用于杀死液体中的细菌、病毒等微生物杀死,该杀菌装置 400可以通过物理手段或者化学手段杀死液体中的细菌、病毒等微生物杀死,例如该杀菌装置400可以通过紫外线杀死液体中的细菌、病毒等微生物,再如该杀菌装置400可以通过臭氧杀死液体中的细菌、病毒等微生物。
[0046]
该杀菌装置400可以杀死通过抽清洁液装置的清洁液中的细菌、病毒等微生物,该杀菌装置400也可以用来杀死通过抽污液装置200的污液中的细菌、病毒等微生物,该杀菌装置400还可以同时杀死通过清洁液装置的清洁液以及抽污液装置200的污液中的细菌、病毒等微生物,在此不做具体的限定。
[0047]
上述抽尘装置、抽污液装置200、抽清洁液装置、过滤装置300以及杀菌装置400中
至少两个设置在基座100的维护工位上。较佳地,上述抽尘装置、抽污液装置200、抽清洁液装置、过滤装置300以及杀菌装置400均设置在基座 100的维护工位,如此设置,方便对上述各装置进行的维护,同时将上述各装置集成于维护工位,还能够使清洁基站1000的结构更加紧凑。
[0048]
考虑到基座100上的维护工位位于基座100的表面的话,则清洁基站1000 的抽尘装置、抽污液装置200、抽清洁液装置、过滤装置300、杀菌装置400是显露于基座100外表面的,这样就使得上述各装置容易受到外界因素的干扰,鉴于此,请参阅图1,该基座100设置有容纳腔100a以及与容纳腔100a连通的维护窗口100b,该清洁基站1000还包括维护板500,该维护板500用于封盖或者打开维护窗口100b。
[0049]
由于维护工位由容纳腔100a形成,这就使得抽尘装置、抽污液装置200、抽清洁液装置、过滤装置300以及杀菌装置400中至少两个可以安装于该容纳腔100a内部,同时与容纳腔100a连通的维护窗口100b可以通过维护板500打开或者封闭,这样既可以避免各装置从维护窗口100b显露而受到外界因素的干扰,同时还可以通过维护板500打开维护窗口100b,以便对上述各装置进行检查、维修等工作。
[0050]
进一步地,该维护窗口100b开设于基座100的侧表面,该维护板500的位置也随之维护窗口100b开设的位置的改变而改变,即该维护板500同样位于基座100的侧表面,如此设置,在该清洁基站1000靠墙放置时,该维护板500是位于基座100的侧方,这样就避免了维护板500干扰清洁基站1000的放置,同时也确保了维护板500在不挪动基座100的情况下能够正常打开。
[0051]
值得注意的是,上述容纳腔100a的形成方式与基座100的具体结构密切相关,上述容纳腔100a可以由基座100中某一结构件上的腔体形成,上述容纳腔 100a也可以由基座100中多个结构件共同围设形成,在此不做具体的限定。
[0052]
较佳地,该容纳腔100a由基座100中多个结构件共同围设形成,具体的,请参阅图1和图2,该基座100包括底座110、水箱支架120以及后盖130,该水箱支架120安装于底座110上方,此时该水箱支架120和底座110构成c型结构,该后盖130封盖该水箱支架120的后侧以及该水箱支架120的后侧设置,该后盖 130与水箱支架120共同围设形成容纳腔100a,该维护窗口100b开设于后盖130 上。
[0053]
应当说的是,该水箱支架120与后盖130装配后,水箱支架120与后盖130 之间是存在间隙的,也即该容纳腔100a是由该水箱支架120和后盖130之间的间隙形成,这样就可以充分利用于水箱支架120和后盖130之间的间隙来安装清洁基站1000中的抽尘装置、抽污液装置200、抽清洁液装置、过滤装置300、杀菌装置400中的至少两种,从而使得整个清洁基站1000的结构更加紧凑,同时还能够缩小清洁基站1000的体积。
[0054]
进一步地,请参阅图2,该水箱支架120面对后盖130的表面部分凹设,以形成供抽尘装置、抽污液装置200、抽清洁液装置、过滤装置300、杀菌装置 400中的至少两种安装的安装凹部120a,后盖130、水箱支架120以及底座110 完成装配后,后盖130封盖水箱支架120的安装凹部120a,以形成容纳腔100a。如此设置,可以确保该容纳腔100a的容积,从而便于上述各装置的集成安装。
[0055]
考虑到清洁机器人被清洗时需要停靠于一个固定的位置,鉴于此,该基座100上形成有供清洁机器人停靠的清洁工位,该清洁工位为供清洁机器人停靠的空间,该清洁工位
可以是封闭式的空间,如该清洁工位形成于基座100的上表面,该清洁工位可以是半开放式的空间,如该清洁工位由基座100侧表面开设的凹槽形成,该基座100侧表面开设的凹槽可以由活动门打开或者开启,以形成封闭式的清洁工位。
[0056]
请参阅图1和图2,该基座100上装载有储液箱600,该储液箱600可以是独立于基座100的储水容器,该储液箱600也可以由基座100上的腔体结构形成,在此对储液箱600的形成不做具体的限定。该储液箱600用于装载清洁液,该储液箱600装载的清洁液可以是清洁水、清洁机或者清洁水与清洁剂的混合液,在此对该储液箱600装载的液体的类型不做具体的限定。
[0057]
该抽清洁液装置的进水端与储液箱600连通,该抽清洁液装置的出水端位于清洁工位处,该抽清洁液装置用于驱动清洁液打湿清洁机器人的拖擦件,从而使得清洁机器人的拖擦件能够完成清洁。
[0058]
该清洁机器人的拖擦件的清洗方式有很多种,例如,该清洁机器人可以浸泡于清洁液中并通过自身的转动实现清洁,此时该基座100的清洁工位下方设置有清洁槽,该清洁槽用于承载清洁液,以使得位于清洁工位的清洁机器人的拖擦件能够被清洁液浸泡,该清洁槽的底部设置有污水抽吸口100c,以便于清洁槽内的清洁液的排出。
[0059]
再如,该清洁机器人的拖擦件还可以通过旋转的刮板刮擦清洁,该基座 100的清洁工位设置有电机和刮板,该电机固定于清洁工位处,该电机驱动刮板旋转,以对清洁机器人的拖擦件进行刮擦,从而实现对清洁机器人的拖擦件的清洁,该清洁工位处还设置有供污液排出的污水抽吸口100c,该污水抽吸口100c优选设置于清洁工位的最低处。
[0060]
该抽污液装置200的进液端与污水抽吸口100c连通,该抽污液装置200的出水端与储液箱600连通,该过滤装置300串接于该抽污液装置200和储液箱 600连通的管路上,即该过滤装置300可以位于抽污液装置200的进水侧也可以位于该抽污液装置200的出水侧,在此不做具体的限定。
[0061]
该抽污液装置200用于将清洗清洁机器人的拖擦件污液抽回过滤装置 300,过滤装置300将污液进行过来,以将污液中的颗粒物、悬浮物、有色物质等一一进行过滤,从而使得从过滤装置300回流至储液箱600内的液体是干净,进而使得储液箱600内的清洁液可以循环使用,提高了清洁液的利用率。
[0062]
进一步地,请一并参阅图3,该清洁基站1000还包括过滤网700,该过滤网700设置于污水抽吸口100c,该过滤网700用于过滤污液中体积较大的赃物,如木屑、纸屑、土块、毛发等等,如此可以有效地避免污液中体积较大的赃物将过滤装置300堵塞。
[0063]
值得注意的是,该过滤网700用于兜住污液中的赃物,因此过滤网700 需要频繁的进行清洁,因此,可以将过滤网700可拆卸地设置在污水抽吸口 100c,较佳地,该过滤网700可以呈漏斗状,该污水抽吸口100c的内壁面也可以呈锥面设置,这样就使得该过滤网700可以通过自身的重力直接装配至污水抽吸口100c。
[0064]
考虑到清洁机器人的拖擦件对待清洁面清洁后,清洁机器人的拖擦件表面会附着细菌或者滋生细菌,这样就会导致清洗清洁机器人的拖擦件清洁液形成携带有细菌、病毒等微生物的污液,污液回收至储液箱600内则会滋生大量微生物,进而导致储液箱600内的发臭。鉴于此,请参阅图2,该杀菌装置400设置于抽污液装置200与储液箱600连通的管路上,以对回流至储液箱600内的污液进行杀菌。
[0065]
进一步地,该杀菌装置400位于过滤装置300的出液侧,即回流至储液箱600内的液体是依次通过过滤装置300和杀菌装置400的,如此设置,一方面可以避免混合于回流污液中的颗粒物、悬浮物以及其他杂物对杀菌装置 400造成影响,另一方面还可以避免该杀菌装置400反复对该过滤装置300阻拦下来的颗粒物、悬浮物以及其他杂物进行杀菌。
[0066]
该杀菌装置400包括臭氧发生装置410,该臭氧发生装置410具有进气口和出气口,该臭氧发生装置410的进气口与环境连通,该臭氧发生装置410的出气口与该过滤装置300与储液箱600连通的管路上,该臭氧发生装置410产生的臭氧能够有效地将回流液体中的细菌、病毒进行杀灭。
[0067]
值得注意的是,气体进入到液体内需要一定的气压,因此,该杀菌装置 400还可以包括供气装置420,该供气装置420可以是气泵、风机等,该供气装置420与臭氧发生器的进气口连通,以驱动空气依次通过臭氧发生器的进气口和出气口,这样不仅可以保证有足够的空气进入到臭氧发生器内,以使得臭氧发生器能够产生足够多的臭氧,同时还能够保证臭氧发生器内的臭氧有足够大的气压,以便于臭氧与回流液体混合。
[0068]
进一步地,该清洁基站1000还包括三通管800,为了方便描述连接关系,将三通管800中的一个接头定义为第一接头810,三通管800中的另外两个接头定义为第二接头820,第一接头810与储液箱600管路连通,两第二接头820中的一个第二接头820与过滤装置300的出液端连通,两第二接头820中的另一个第二接头820与臭氧发生器的出气口连通,如此设置,有便于臭氧发生器与污液回流管路连通,进而便于清洁基站1000内的零部件的组装。
[0069]
更进一步地,该清洁基站1000还包括单向阀900,该单向阀900的一端与臭氧发生器的出气口连通,该单向阀900的另一端与三通管800中对应的第二接头820连通,该单向阀900的设置可以限定臭氧发生器中产生的臭氧只能够从臭氧发生器的出气口排出,同时限制了回流的污水通过单向阀900向臭氧发生器内灌流,这样有利于保证臭氧发生器的工作有效性。
[0070]
应当说的是,清洗清洁机器人的清洁件所产生的污水有限,若该抽污液装置200在污水抽取完后仍工作的话,则容易因为空载而导致抽污液装置200 损坏,鉴于此,请参阅图2,该清洁基站1000还设置有液体检测装置950,该液体检测装置950可以是液体检测仪,该液体检测装置950设置于该抽污液装置200与污液抽吸口连通的管路上或者设置于该抽污液装置200与储液箱600 连通的管路上,该清洁基站1000还设置有控制装置,该控制装置在液体检测装置950未检测到污液通过抽污液装置200回流至储液箱600内时,控制抽污液装置200停止工作,以避免抽污液装置200因空载而被损坏。
[0071]
值得注意的,上述抽尘装置、抽污液装置200、抽清洁液装置、过滤装置 300、杀菌装置400均可以与控制装置电连接,控制装置可以根据接收到的指令控制对应的装置工作,从而完成对清洁机器人的维护。
[0072]
本实用新型还提出一种清洁机器人系统,该清洁机器人系统包括清洁机器人以及清洁基站1000,该清洁基站1000的具体结构参照上述实施例,由于清洁机器人系统采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再一一赘述。
[0073]
以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构
变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1