一种可识别移动方向的智能洗地机的制作方法
1.本实用新型涉及洗地机领域,尤其是涉及一种可识别移动方向的智能洗地机。
背景技术:
2.洗地机作为清洁家电越来越受到广大用户的喜爱,通常包括本体,清洁座部。本体内设置回收水箱和清洁水箱,以及用于抽吸的主电机,清洁座部包括用于托擦的清洁辊,为了保障清洁效率,一般设置两个清洁辊。洁净的水通过内置水管喷洒至带有绒毛的清洁辊上,清洁辊高速旋转拖洗地面。随着人们生活水平的不断提升,以及智能家居的不断普及,提升洗地机的智能化水平,一直是本领域技术人员的目标所在,因而现有技术还有待改进和提高。
技术实现要素:
3.鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种可识别移动方向的智能洗地机。
4.为解决以上技术问题,本实用新型采取了以下技术方案:
5.本实用新型提供一种可识别移动方向的智能洗地机,包括洗地机主体,所述洗地机主体上设置有方向识别机构,所述方向识别机构包括移动部件、联接部件、码盘和至少两条光路,工作时,所述移动部件随洗地机主体的拖动而移动,所述码盘通过所述联接部件与所述移动部件联接,所述码盘随所述移动部件的活动而转动,所述码盘隔断于光路中、其上设置有通路部,当所述通路部转动至光路处时光路处于通路状态。
6.进一步地,所述的可识别移动方向的智能洗地机,所述光路为两条。
7.进一步地,所述的可识别移动方向的智能洗地机,两条光路分别为第一光路和第二光路,所述通路部包括第一通路和第二通路,在码盘转动的一状态下,所述第一通路和第二通路分别处于第一光路和第二光路位置,第一光路和第二光路处于通路状态;在码盘转动的另一状态下,所述第一通路和第二通路中的一个处于第一光路或第二光路位置,所述第一光路或第二光路处于通路状态;在码盘转动的其它状态下,所述第一光路和第二光路处于断路状态。
8.进一步地,所述的可识别移动方向的智能洗地机,所述通路部还包括第三通路和第四通路,在码盘顺时针转动的第一状态下,所述第一通路和第二通路分别处于第一光路和第二光路位置,所述第一光路和第二光路处于通路状态;在码盘顺时针转动的第二状态下,第三通路处于第一光路位置,所述第一光路处于通路状态,第二光路处于断路状态;在码盘顺时针转动的第三状态下,所述第一通路、第二通路、第三通路和第四通路均不处于光路位置,所述第一光路和第二光路处于断路状态;在码盘顺时针转动的第四状态下,所述第一通路处于第二光路位置,所述第一光路处于断路状态,所述第二光路处于通路状态;在码盘顺时针转动的第五状态下,所述第三通路和第四通路分别处于第二光路和第一光路位置,所述第一光路和第二光路处于通路状态。
9.进一步地,所述的可识别移动方向的智能洗地机,在码盘逆时针转动的第一状态下,所述第一通路和第二通路分别处于第一光路和第二光路位置,所述第一光路和第二光路处于通路状态;在码盘逆时针转动的第二状态下,第一通路处于第二光路位置,所述第二光路处于通路状态,第一光路处于断路状态;在码盘逆时针转动的第三状态下,所述第一通路、第二通路、第三通路和第四通路均不处于光路位置,所述第一光路和第二光路处于断路状态;在码盘逆时针转动的第四状态下,所述第二通路处于第一光路位置,所述第一光路处于通路状态,所述第二光路处于断路状态;在码盘逆时针转动的第五状态下,所述第三通路和第四通路分别处于第二光路和第一光路位置,所述第一光路和第二光路处于通路状态。
10.在一较佳实施例中,所述的可识别移动方向的智能洗地机,所述码盘呈圆盘状,所述通路部为码盘边缘上的缺口,光路从所述缺口中通过,否则被码盘隔断。
11.在一较佳实施例中,所述的可识别移动方向的智能洗地机,所述方向识别机构还包括模组支架,所述移动部件、联接部件和码盘装设于所述模组支架下,所述模组支架上还设置有弹性部件,工作时,所述弹性部件推压所述移动部件使其与地面紧密接触。
12.在一较佳实施例中,所述的可识别移动方向的智能洗地机,所述联接部件包括第一齿轮、第二齿轮和第三齿轮,所述第一齿轮与所述移动部件联接、随所述移动部件的活动而转动,所述第二齿轮与所述第一齿轮啮合联接,所述第三齿轮与所述第二齿轮啮合连接,所述第三齿轮与所述码盘同轴转动。
13.具体的,所述的可识别移动方向的智能洗地机,所述移动部件为滚轮。
14.在一较佳实施例中,所述的可识别移动方向的智能洗地机,所述光路为红外线光路,由红外线发射器和红外线接收器生成。
15.相较于现有技术,本实用新型提供一种可识别移动方向的智能洗地机,包括洗地机主体,所述洗地机主体上设置有方向识别机构,所述方向识别机构包括移动部件、联接部件、码盘和至少两条光路,工作时,所述移动部件随洗地机主体的拖动而移动,所述码盘通过所述联接部件与所述移动部件联接,所述码盘随所述移动部件的活动而转动,所述码盘隔断于光路中、其上设置有通路部,当所述通路部转动至光路处时光路处于通路状态。本实用新型通过方向识别机构置于产品的底部,当用户使用产品进行清洁时,方向识别机构的移动部件随用户的拖动操作而活动,与此同时,移动部件运动被方向识别机构转换为码盘的转动,码盘的转动导致光路的通断,光路的通断可转换成电信号,供洗地机主体的处理器识别,不同方向的运动产生的光电信号顺序不同,从而可以识别用户操作洗地机的拖动方向,在此基础上调整洗地机的前后滚刷转速,形成助力,从而提升了洗地机的智能化水平,使洗地机能够智能助力用户的日常操作,用户的操作将更为省力便捷。
附图说明
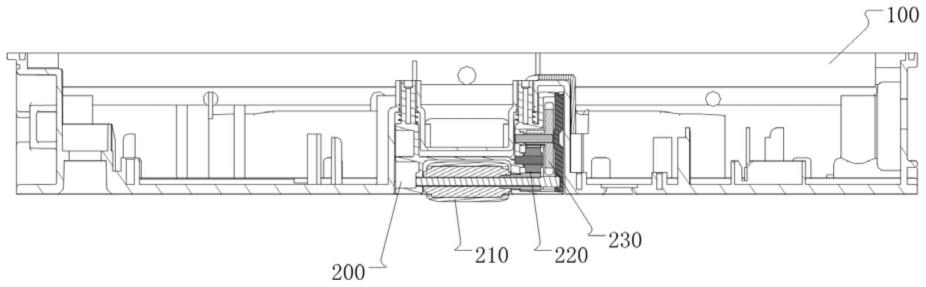
16.图1为本实用新型提供的可识别移动方向的智能洗地机的结构示意图。
17.图2为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的截面结构示意图。
18.图3为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的内部示意图。
19.图4为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘顺
时针转动的第一状态的结构示意图。
20.图5为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘顺时针转动的第二状态的结构示意图。
21.图6为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘顺时针转动的第三状态的结构示意图。
22.图7为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘顺时针转动的第四状态的结构示意图。
23.图8为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘顺时针转动的第五状态的结构示意图。
24.图9为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘逆时针转动的第一状态的结构示意图。
25.图10为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘逆时针转动的第二状态的结构示意图。
26.图11为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘逆时针转动的第三状态的结构示意图。
27.图12为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘逆时针转动的第四状态的结构示意图。
28.图13为本实用新型提供的可识别移动方向的智能洗地机的方向识别机构的码盘逆时针转动的第五状态的结构示意图。
具体实施方式
29.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
30.需要说明的是,当部件被称为“装设于”、“固定于”或“设置于”另一个部件上,它可以直接在另一个部件上或者可能同时存在居中部件。当一个部件被称为是“连接于”另一个部件,它可以是直接连接到另一个部件或者可能同时存在居中部件。
31.还需要说明的是,本实用新型实施例中的左、右、上、下等方位用语,仅是互为相对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。
32.如图1、图2和图3所示,本实用新型提供的一种可识别移动方向的智能洗地机,包括洗地机主体100,所述洗地机主体100上设置有方向识别机构200,所述方向识别机构200包括移动部件210、联接部件220、码盘230和至少两条光路,工作时,所述移动部件210随洗地机主体100的拖动而移动,所述码盘230通过所述联接部件220与所述移动部件210联接,所述码盘230随所述移动部件210的活动而转动,所述码盘230隔断于光路中、其上设置有通路部239,当所述通路部239转动至光路处时光路处于通路状态。本实用新型通过方向识别机构200置于产品的底部,当用户使用产品进行清洁时,方向识别机构200的移动部件210随用户的拖动操作而活动,与此同时,移动部件210运动被方向识别机构200转换为码盘230的转动,码盘230的转动导致光路的通断,光路的通断可转换成电信号,供洗地机主体100的处理器识别,不同方向的运动产生的光电信号顺序不同,从而可以识别用户操作洗地机的拖
动方向,在此基础上调整洗地机的前后滚刷转速,形成助力,从而提升了洗地机的智能化水平,使洗地机能够智能助力用户的日常操作,用户的操作将更为省力便捷。进一步地,本实用新型提供的可识别移动方向的智能洗地机,所述光路为两条,两条光路的使用有利于简化结构,有利于节省元器件的投入,有利于降低生产成本,有利于简化后续的电信号拾取和逻辑处理,也有利于增加产品识别效果的稳定性。较佳地,本实用新型提供的可识别移动方向的智能洗地机,所述光路为红外线光路,由红外线发射器242和红外线接收器241生成。当然也可以采用激光光路等进行替代,本实施例主要采用两组红外线发射器242和红外线接收器241形成两条光路,这样成本较低,效果稳定。较佳地,本实用新型提供的可识别移动方向的智能洗地机,所述码盘230呈圆盘状,所述通路部239为码盘230边缘上的缺口,光路从所述缺口中通过,否则被码盘230隔断。较佳地,本实用新型提供的可识别移动方向的智能洗地机,所述方向识别机构200还包括模组支架250,所述移动部件210、联接部件220和码盘230装设于所述模组支架250下,所述移动部件210、联接部件220和码盘230装设于一体,所述模组支架250将所述移动部件210、联接部件220和码盘230罩设于其下,两组红外线发射器242和红外线接收器241装设于所述模组支架250上模组支架250上具有相应地共红外线发射器242与红外线接收器241之间的光路通过的通孔(图中未标号),所述模组支架250上还设置有弹性部件251,工作时,所述弹性部件251推压所述移动部件210使其与地面紧密接触。具体的,在本实施例中,所述弹性部件251为一对压簧。
33.较佳地,本实用新型提供的可识别移动方向的智能洗地机,所述联接部件220包括第一齿轮221、第二齿轮222和第三齿轮223,所述第一齿轮221与所述移动部件210联接、随所述移动部件210的活动而转动,所述第二齿轮222与所述第一齿轮221啮合联接,所述第三齿轮223与所述第二齿轮222啮合连接,所述第三齿轮223与所述码盘230同轴转动。具体的,本实用新型提供的可识别移动方向的智能洗地机,所述移动部件210为滚轮,所述滚轮为滚筒型滚轮,以增加与地面的接触面积,所述第一齿轮221设置于所述的滚轮的一端、与所述滚轮同轴转动,所述第一齿轮221、第二齿轮222和滚轮均位于码盘230的下方,所述光路位于所述码盘230的上半部。
34.进一步地,本实用新型提供的可识别移动方向的智能洗地机,两条光路分别为第一光路301和第二光路302,所述通路部239包括第一通路231和第二通路232,在码盘230转动的一状态下,所述第一通路231和第二通路232分别处于第一光路301和第二光路302位置,第一光路301和第二光路302处于通路状态;在码盘230转动的另一状态下,所述第一通路231和第二通路232中的一个处于第一光路301或第二光路302位置,所述第一光路301或第二光路302处于通路状态;在码盘230转动的其它状态下,所述第一光路301和第二光路302处于断路状态。
35.如图4-图8所示,本实施例的通路部239(缺口)具有两对,对称设置于所述码盘230上,且两对通路部239对称设置于码盘230的上下部,码盘230转半圈、其下部的一对通路部239移动至原先上部的一对通路部239所在之处,码盘230上部的一对通路部239移动至原先下部的一对通路部239所在之处,即码盘230转半圈为一个周期。进一步地,本实用新型提供的可识别移动方向的智能洗地机,所述通路部239还包括第三通路233和第四通路234,在码盘230顺时针转动的第一状态下,所述第一通路231和第二通路232分别处于第一光路301和第二光路302位置,所述第一光路301和第二光路302处于通路状态;在码盘230顺时针转动
的第二状态下,第三通路233处于第一光路301位置,所述第一光路301处于通路状态,第二光路302处于断路状态;在码盘230顺时针转动的第三状态下,所述第一通路231、第二通路232、第三通路233和第四通路234均不处于光路位置,所述第一光路301和第二光路302处于断路状态;在码盘230顺时针转动的第四状态下,所述第一通路231处于第二光路302位置,所述第一光路301处于断路状态,所述第二光路302处于通路状态;在码盘230顺时针转动的第五状态下,所述第三通路233和第四通路234分别处于第二光路302和第一光路301位置,所述第一光路301和第二光路302处于通路状态。
36.如图9-图13所示,进一步地,本实用新型提供的可识别移动方向的智能洗地机,在码盘230逆时针转动的第一状态下,所述第一通路231和第二通路232分别处于第一光路301和第二光路302位置,所述第一光路301和第二光路302处于通路状态;在码盘230逆时针转动的第二状态下,第一通路231处于第二光路302位置,所述第二光路302处于通路状态,第一光路301处于断路状态;在码盘230逆时针转动的第三状态下,所述第一通路231、第二通路232、第三通路233和第四通路234均不处于光路位置,所述第一光路301和第二光路302处于断路状态;在码盘230逆时针转动的第四状态下,所述第二通路232处于第一光路301位置,所述第一光路301处于通路状态,所述第二光路302处于断路状态;在码盘230逆时针转动的第五状态下,所述第三通路233和第四通路234分别处于第二光路302和第一光路301位置,所述第一光路301和第二光路302处于通路状态。
37.更具体的,若通路状态的电信号为1,断路状态的电信号为0,本实用新型由滚轮转动带动码盘230旋转,产生光耦信号通断,光耦信号转化成0/1数字信号(两码),过滤掉00信号,11信号后面紧跟01信号,即信号为1101,即为前进方向,11信号后面紧跟10信号,即信号为1110,即为后退方向。又或者,由滚轮转动带动码盘230旋转,产生光耦信号通断,光耦信号转化成0/1数字信号(两码),过滤掉11信号,00信号后面紧跟10信号,即信号为0010,即为前进方向,00信号后面紧跟01信号,即信号为0001,即为后退方向。需要再次点明的是,本实用新型的“前进方向”、“后退方向”、“顺时针”、“逆时针”都是相对的,仅是互为相对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。
38.本实用新型的码盘230两侧放置两对对红外发射器242和红外接收器241,在码盘230随滚轮转动过程中,两处红外灯管信号接通/断开,产生电信号,通过不同顺序电信号识别滚轮转动方向,进而识别产品运动方向,当主机接收到往前运动信号时,主机调整前后滚刷转速,让前滚刷快于后滚刷,以此形成往前助力;往后运动调整后滚刷快于前滚刷,形成往后助力,从而提升产品的智能性。
39.综上所述,本实用新型通过方向识别机构置于产品的底部,当用户使用产品进行清洁时,方向识别机构的移动部件随用户的拖动操作而活动,与此同时,移动部件运动被方向识别机构转换为码盘的转动,码盘的转动导致光路的通断,光路的通断可转换成电信号,供洗地机主体的处理器识别,不同方向的运动产生的光电信号顺序不同,从而可以识别用户操作洗地机的拖动方向,在此基础上调整洗地机的前后滚刷转速,形成助力,从而提升了洗地机的智能化水平,使洗地机能够智能助力用户的日常操作,用户的操作将更为省力便捷。
40.可以理解的是,对本领域普通技术人员来说,可以根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,而所有这些改变或替换都应属于本实用新型所附的
权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1