基于人体工学的智能按摩沙发的制作方法
1.本技术涉及按摩沙发的技术领域,尤其是涉及基于人体工学的智能按摩沙发。
背景技术:
2.所谓人体工学,在本质上就是使工具的使用方式尽量适合人体的自然形态,这样就可以使使用工具的人在工作时,身体和精神不需要主动适应,从而尽量减少人体使用工具造成的疲劳,当身体疲劳时许多人会选择通过按摩沙发进行按摩,以舒缓疲惫的神经。
3.在实现本技术过程中,发明人发现该技术中至少存在如下问题按摩沙发是利用机械的滚动力作用和机械力挤压来进行按摩,人工推拿按摩能够疏通经络,使气血循环,保持机体的阴阳平衡,所以按摩后可感到肌肉放松,关节灵活,使人精神振奋,消除疲劳,对保证身体健康有重要作用,然而如今许多的按摩沙发都只是对背部的一处进行按摩,无法全方位的进行按摩操作,同时也无法在对背部按摩时同步对人员的肩部进行锤击按摩,使按摩沙发的多样性较差。
技术实现要素:
4.为了改善按摩沙发无法全方位按摩和同步对肩部锤击按摩的问题,本技术提供基于人体工学的智能按摩沙发。
5.本技术提供基于人体工学的智能按摩沙发,采用如下的技术方案:
6.基于人体工学的智能按摩沙发,包括沙发本体和沙发本体后端连接的靠背,所述靠背靠近沙发本体的一面连接有橡胶软垫,所述橡胶软垫的表面安装有凸起块,所述靠背的正面中间开设有安装槽,所述橡胶软垫嵌设在安装槽的一侧,所述安装槽的内腔安装有转动部,所述靠背的上端两侧还连接有撞击件。
7.通过采用上述技术方案,当人员坐在沙发本体上时,需要将背部靠在靠背上,这时人员的背部将与橡胶软垫相贴合,凸起块也将对人员的背部抵紧,而撞击件也将位于人员的肩部上端,操作人员可以启动转动部对人员的背部按摩和对肩部锤击。
8.可选的,所述转动部包括连接在沙发本体一侧的正反转电机,所述安装槽的内腔下端连接有第一连杆,所述第一连杆与正反转电机的输出端相连接,所述第一连杆的上端连接有螺杆,所述螺杆远离第一连杆的一端设置有第二连杆。
9.通过采用上述技术方案,当需要按摩时,人员可以启动正反转电机带动第一连杆进行转动,当第一连杆转动时也将带动螺杆和第二连杆同步转动。
10.可选的,所述第一连杆上连接有三组间隔距离相等的第一凸轮,所述第一连杆远离正反转电机的一端连接有传动齿轮。
11.通过采用上述技术方案,第一凸轮将跟随第一连杆进行转动,当第一凸轮的突出端转动到距离橡胶软垫近的一侧时,第一凸轮的突出端将通过橡胶软垫向外顶起,从而可以对人员的背部下端进行按摩,当第一凸轮的突出端转动到另一侧时,第一凸轮的突出端将无法与人员背部接触,从而使第一凸轮可以间歇式的进行按摩操作。
12.可选的,所述螺杆的一端连接有主齿轮,所述螺杆上连接有螺母,所述螺杆远离橡胶软垫的一端设置有定位杆,所述螺母通过定位滑套与定位杆相连接。
13.通过采用上述技术方案,当螺杆转动时,螺母将在螺杆上进行往复移动,同时螺母将通过定位滑套与定位杆相连接,避免螺母在往复移动时跟随螺杆同步旋转。
14.可选的,所述螺母远离定位杆的一端连接有连接板,所述连接板远离螺母的一端中间开设有凹槽,所述凹槽的内侧安装有滚动轮。
15.通过采用上述技术方案,当螺母移动时将带动连接板同步移动,滚动轮安装在连接板前端的凹槽内侧,同时滚动轮的外凸部分将抵紧橡胶软垫的中间部分,当连接板带动滚动轮移动时,滚动轮可以对人员背部的中间位置进行滚动按压。
16.可选的,所述第二连杆的一端连接有从动齿轮,所述第二连杆上连接有三组间隔距离相等的第二凸轮,所述第二凸轮与第一凸轮相对齐。
17.通过采用上述技术方案,当第二连杆转动时将带动第二凸轮同步转动,因第二凸轮与第一凸轮结构和原理相同,当第二凸轮转动时凸出端将对人员的背部上端进行抵紧按摩,从而使人员的背部神经可以全方位的得到按压。
18.可选的,所述主齿轮的两端分布与传动齿轮和从动齿轮啮合连接。
19.通过采用上述技术方案,第一连杆转动时将带动传动齿轮进行旋转,这时传动齿轮将与主齿轮产生啮合带动其旋转,当主齿轮转动时将带动螺杆同步旋转,同时主齿轮还将与从动齿轮产生啮合带动其旋转。
20.可选的,所述撞击件包括通过靠背上端贯穿的导向杆,所述导向杆位于第二凸轮的上端,所述导向杆的中间两侧焊接有限位板,所述限位板的上端连接有弹性件,所述限位板的顶端还安装有横板。
21.通过采用上述技术方案,当第二凸轮的凸出端转到上方时,导向杆将被向上顶起,这时导向杆将通过限位板挤压弹性件产生变形。
22.可选的,所述横板远离导向杆的一侧下端焊接有伸缩杆,所述伸缩杆远离横板的一端安装有撞击头,所述撞击头的上端还设置有缓冲弹簧。
23.通过采用上述技术方案,当导向杆向上升起时将通过横板带动伸缩杆同步升起,当第二凸轮的凸出端转动到远离导向杆的一侧时,弹性件将回弹导向杆和伸缩杆,使二者回到初始位置,这时伸缩杆可以自动上下伸缩调节,由于伸缩杆下端的撞击头位于人员的肩部上端,当伸缩杆带动撞击头升降调节时,撞击头可以间歇式的对人员肩部进行锤击,而缓冲弹簧也将对撞击头的撞击力进行缓冲,使人员的肩部位置可以被同步锤击按摩。
24.综上所述,本技术包括以下至少一种有益效果:
25.1.当人员坐在沙发本体上时,需要将背部靠在靠背上,这时人员的背部将与橡胶软垫相贴合,凸起块也将对人员的背部抵紧,而撞击件也将位于人员的肩部上端,操作人员可以启动转动部对人员的背部按摩和对肩部锤击,第一凸轮和第二凸轮发生旋转时,二者的突出端将通过橡胶软垫向外顶起,从而可以对人员的背部下端和背部上端同时进行按摩,当第一凸轮和第二凸轮的突出端转动到另一侧时,第一凸轮和和第二凸轮的突出端将无法与人员背部接触,从而使二者可以间歇式的进行按摩操作,当螺母在螺杆上往复移动时,连接板将跟随螺母同步移动,这时滚动轮的外凸部分将抵紧橡胶软垫的中间部分,当连接板带动滚动轮移动时,滚动轮可以对人员背部的中间位置进行滚动按压;
26.2.当第二凸轮的凸出端转到上方时,导向杆将被向上顶起,这时导向杆将通过限位板挤压弹性件产生变形,当第二凸轮的凸出端转动到远离导向杆的一侧时,弹性件将回弹导向杆和伸缩杆,使二者回到初始位置,由于伸缩杆下端的撞击头位于人员的肩部上端,当伸缩杆带动撞击头升降调节时,撞击头可以间歇式的对人员肩部进行锤击,而缓冲弹簧也将对撞击头的撞击力进行缓冲,使人员的肩部位置可以被同步锤击按摩。
附图说明
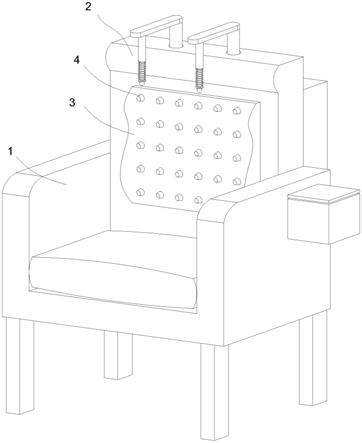
27.图1是本技术实施例一的沙发本体结构示意图;
28.图2是本技术实施例一的安装槽内部结构图;
29.图3是本技术实施例一的转动部结构示意图;
30.图4是本技术实施例二的撞击件结构示意图。
31.附图标记说明:1、沙发本体;2、靠背;3、橡胶软垫;4、凸起块;5、安装槽;6、转动部;61、正反转电机;62、第一连杆;621、第一凸轮;622、传动齿轮;63、螺杆;631、主齿轮;632、螺母;6321、连接板;6322、凹槽;6323、滚动轮;633、定位杆;634、定位滑套;64、第二连杆;641、从动齿轮;642、第二凸轮;7、撞击件;71、导向杆;72、限位板;73、弹性件;74、横板;741、伸缩杆;742、撞击头;743、缓冲弹簧。
具体实施方式
32.以下结合附图1-4对本技术作进一步详细说明。
33.实施例一:
34.本技术实施例一公开基于人体工学的智能按摩沙发。参照图1和图2,包括沙发本体1和沙发本体1后端连接的靠背2,靠背2靠近沙发本体1的一面连接有橡胶软垫3,橡胶软垫3的表面安装有凸起块4,靠背2的正面中间开设有安装槽5,橡胶软垫3嵌设在安装槽5的一侧,安装槽5的内腔安装有转动部6,靠背2的上端两侧还连接有撞击件7,当人员坐在沙发本体1上时,需要将背部靠在靠背2上,这时人员的背部将与橡胶软垫3相贴合,凸起块4也将对人员的背部抵紧,而撞击件7也将位于人员的肩部上端,操作人员可以启动转动部6对人员的背部按摩和对肩部锤击。
35.参照图2和图3,转动部6包括连接在沙发本体1一侧的正反转电机61,安装槽5的内腔下端连接有第一连杆62,第一连杆62与正反转电机61的输出端相连接,第一连杆62的上端连接有螺杆63,螺杆63远离第一连杆62的一端设置有第二连杆64,当需要按摩时,人员可以启动正反转电机61带动第一连杆62进行转动,当第一连杆62转动时也将带动螺杆63和第二连杆64同步转动。
36.参照图3,第一连杆62上连接有三组间隔距离相等的第一凸轮621,第一连杆62远离正反转电机61的一端连接有传动齿轮622,当第一连杆62转动时将带动传动齿轮622同步转动,而第一凸轮621也将跟随第一连杆62进行转动,当第一凸轮621的突出端转动到距离橡胶软垫3近的一侧时,第一凸轮621的突出端将通过橡胶软垫3向外顶起,从而可以对人员的背部下端进行按摩,当第一凸轮621的突出端转动到另一侧时,第一凸轮621的突出端将无法与人员背部接触,从而使第一凸轮621可以间歇式的进行按摩操作。
37.参照图3,螺杆63的一端连接有主齿轮631,螺杆63上连接有螺母632,螺杆63远离
橡胶软垫3的一端设置有定位杆633,螺母632通过定位滑套634与定位杆633相连接,当螺杆63转动时,螺母632将在螺杆63上进行往复移动,同时螺母632将通过定位滑套634与定位杆633相连接,避免螺母632在往复移动时跟随螺杆63同步旋转。
38.参照图3,螺母632远离定位杆633的一端连接有连接板6321,连接板6321远离螺母632的一端中间开设有凹槽6322,凹槽6322的内侧安装有滚动轮6323,当螺母632移动时将带动连接板6321同步移动,滚动轮6323安装在连接板6321前端的凹槽6322内侧,同时滚动轮6323的外凸部分将抵紧橡胶软垫3的中间部分,当连接板6321带动滚动轮6323移动时,滚动轮6323可以对人员背部的中间位置进行滚动按压。
39.参照图3,第二连杆64的一端连接有从动齿轮641,第二连杆64上连接有三组间隔距离相等的第二凸轮642,第二凸轮642与第一凸轮621相对齐,当第二连杆64转动时将带动第二凸轮642同步转动,因第二凸轮642与第一凸轮621结构和原理相同,当第二凸轮642转动时凸出端将对人员的背部上端进行抵紧按摩,从而使人员的背部神经可以全方位的得到按压。
40.参照图3,主齿轮631的两端分布与传动齿轮622和从动齿轮641啮合连接,第一连杆62转动时将带动传动齿轮622进行旋转,这时传动齿轮622将与主齿轮631产生啮合带动其旋转,当主齿轮631转动时将带动螺杆63同步旋转,同时主齿轮631还将与从动齿轮641产生啮合带动其旋转。
41.实施例二:
42.参照图4,实施例二和实施例一的区别在于,实施例二撞击件7包括通过靠背2上端贯穿的导向杆71,导向杆71位于第二凸轮642的上端,导向杆71的中间两侧焊接有限位板72,限位板72的上端连接有弹性件73,限位板72的顶端还安装有横板74,横板74远离导向杆71的一侧下端焊接有伸缩杆741,伸缩杆741远离横板74的一端安装有撞击头742,撞击头742的上端还设置有缓冲弹簧743,当第二凸轮642的凸出端转到上方时,导向杆71将被向上顶起,这时导向杆71将通过限位板72挤压弹性件73产生变形,当导向杆71向上升起时将通过横板74带动伸缩杆741同步升起,当第二凸轮642的凸出端转动到远离导向杆71的一侧时,弹性件73将回弹导向杆71和伸缩杆741,使二者回到初始位置,这时伸缩杆741可以自动上下伸缩调节,由于伸缩杆741下端的撞击头742位于人员的肩部上端,当伸缩杆741带动撞击头742升降调节时,撞击头742可以间歇式的对人员肩部进行锤击,而缓冲弹簧743也将对撞击头742的撞击力进行缓冲,使人员的肩部位置可以被同步锤击按摩。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1