马达轴稳定器的制作方法
马达轴稳定器
1.相关申请的交叉引用
2.本技术要求2020年6月3日提交的申请号为63/033,952的美国临时专利申请的优先权,该申请全文以引用方式并入本文。
背景技术:
3.电动窗帘系统可以包括缠绕在卷管上的覆盖材料。覆盖材料可以包括位于覆盖材料下端的加重下摆杆,使得覆盖材料在窗前竖直地延伸(例如,悬挂)。电动窗帘可以包括驱动系统,该驱动系统联接到卷管以提供管旋转,使得可以通过旋转卷管来升高和降低(即,在竖直方向上移动)覆盖材料的下端。驱动系统可以包括具有驱动轴和齿轮系的马达,该齿轮系操作性地联接到驱动轴和卷管(例如,与之通信),使得马达的致动使卷管旋转。马达可以是由直流(dc)电源驱动的dc马达或由交流(ac)电源驱动的ac马达。
4.当马达与齿轮组件(例如,其包括螺旋齿轮)一起操作时,马达和齿轮组件可能产生不期望的噪声。可能期望降低由马达和/或齿轮组件产生的噪声。
技术实现要素:
5.如本文所述,一种电动窗帘可以包括卷管、附接到所述卷管的柔性材料、马达驱动单元和/或被构造成支撑所述卷管的相应端的安装支架。所述卷管可以包括纵向轴线。所述马达驱动单元可以设置在所述卷管的腔内。所述马达驱动单元可以包括马达、齿轮组件和轴稳定构件。所述马达可以包括一个或多个永磁体,所述一个或多个永磁体至少部分地围绕所述马达的转子。所述马达可以包括从所述马达的驱动端(例如,前表面)延伸的驱动轴和从所述马达的非驱动端(例如,后表面)延伸的后轴。所述驱动轴和所述后轴可以被构造成绕所述纵向轴线旋转。所述齿轮组件可以操作性地联接到所述卷管和所述驱动轴,使得所述马达的致动导致所述齿轮组件使所述卷管旋转。所述轴稳定构件可以操作性地联接到所述后轴。所述轴稳定构件可以被构造成抑制所述马达驱动单元中的轴向力和/或径向力。所述轴稳定构件可以是永久质量,所述永久质量被构造成使得所述马达驱动单元的噪声水平在一个或多个工作频率(例如,在300hz至1khz的范围内)下低于10分贝(db)。
6.所述轴稳定构件可以包括具有第一直径的第一部分和具有第二直径的第二部分。所述第一直径可以大于所述第二直径。所述第一部分可以靠近所述马达,并且所述第二部分可以远离所述马达。所述第二部分可以被构造成位于所述马达驱动单元的印刷电路板的凹口内。所述马达驱动单元可以包括操作性地联接到所述后轴的磁环。所述磁环可以被构造成将磁场导向所述印刷电路板。所述磁环可以被构造成位于所述印刷电路板的所述凹口内。所述轴稳定构件可以位于所述后轴上,例如以能够接近从所述马达延伸的一个或多个马达端子。所述马达驱动单元可以包括一个或多个马达引线,所述一个或多个马达引线被构造成将所述马达印刷电路板电连接到所述一个或多个马达端子。所述轴稳定构件的大小和/或形状可以被设置成能够接近所述一个或多个马达端子。所述轴稳定构件可以是磁性的。所述轴稳定构件可以被构造成将所述磁场导向所述印刷电路板。
7.所述马达驱动单元可以包括延伸部,所述延伸部被构造成例如邻接所述马达的所述后轴,使得径向力被施加到所述后轴。所述径向力可以被构造成在径向方向上使所述后轴偏置。所述延伸部可以从所述马达驱动单元的所述壳体的内表面延伸。所述延伸部分可以是弹簧夹的平台。所述弹簧夹可以被构造成安装在所述马达驱动单元的所述壳体内。所述弹簧夹可以被构造成抑制所述马达驱动单元内的轴向力或径向摆动中的一个或多个。所述弹簧夹可以包括基部,两个臂和平台从所述基部延伸。基部可以是限定边缘的凹形,所述边缘在所述弹簧夹邻接所述后轴时接触所述壳体的所述内表面。所述平台可以包括一对圆形表面,所述一对圆形表面在所述一对圆形表面之间限定凹槽,使得所述后轴搁置在所述凹槽上。所述两个臂可以是弯曲的以与所述马达驱动单元的所述壳体的内表面相对应。所述延伸部和/或所述弹簧夹可以是塑性材料。
8.马达驱动单元的马达可以包括不对称永磁体。所述不对称永磁体可以被构造成向所述马达的转子施加径向力。所述径向力可以被构造成在径向方向上使所述转子偏置。所述不对称永磁体可以包括具有第一质量的第一永磁体和具有大于所述第一质量的第二质量的第二永磁体。所述第一永磁体和所述第二永磁体可以被构造成抑制所述马达驱动单元内的轴向力或径向摆动中的一个或多个。所述第一永磁体可以具有第一厚度,并且所述第二永磁体可以具有大于所述第一厚度的第二厚度。所述第一永磁体和所述第二永磁体可以部分地围绕所述转子。
附图说明
9.图1是示例性电动窗帘。
10.图2是用于图1中所示的示例性电池供电的电动窗帘中的示例性马达驱动单元的透视图。
11.图3是图2中所示的示例性马达驱动单元的详细视图。
12.图4是用于图2中所示的示例性马达驱动单元中的示例性马达组件的透视图。
13.图5是图4中所示的示例性马达组件的前视图。
14.图6是图4中所示的示例性马达组件的侧视图。
15.图7是图4中所示的示例性马达组件的横截面图。
16.图8是用于图2中所示的示例性马达驱动单元中的另一示例性马达组件的透视图。
17.图9是图8中所示的示例性马达组件的前视图。
18.图10是图8中所示的示例性马达组件的侧视图。
19.图11是图8中所示的示例性马达组件的横截面图。
20.图12是用于图1中所示的电动窗帘中的另一示例性马达驱动单元。
21.图13是用于图12中所示的马达驱动单元中的弹簧夹的透视图。
22.图14是与图1中所示的电动窗帘一起使用的示例性马达的前横截面图。
23.图15是图14中所示的示例性马达的侧横截面图。
24.图16是与图1中所示的电动窗帘一起使用的另一示例性马达的前横截面图。
具体实施方式
25.图1描绘了示例性电动窗帘100(例如,诸如交流供电的电动窗帘系统、电池供电的
电动窗帘系统和/或类似物),其包括具有卷管110的窗帘组件105、附接到卷管110的柔性材料120(例如,覆盖材料)、卷管110的第一端112处的马达驱动单元190,以及卷管110的第二端处的惰轮(未示出)。图1是示例性电动窗帘100的透视图。电动窗帘100可以包括被构造为联接到或以其他方式安装到结构的一个或多个安装支架130a、130b。例如,安装支架130a、130b中的每一个安装支架可被构造为安装到(例如,附接到)窗框、墙壁或其他结构,使得电动窗帘100被安装为靠近开口(例如,在开口上方或在开口中),例如,诸如窗。安装支架130a、130b可被构造为安装到竖直结构(例如,如图1所示壁挂式安装到墙壁)和/或安装到水平结构(例如,顶置式安装到天花板)。
26.卷管110可以作为电动窗帘100的旋转元件操作,并且可以沿纵向方向l伸长。安装支架130可以支撑窗帘组件105(例如,可旋转地支撑窗帘组件105的卷管110)。卷管110可以限定纵向轴线116。纵向轴线116可沿纵向方向l延伸。安装支架130可以从结构在径向方向r上延伸。径向方向r可被定义为垂直于结构和纵向轴线116的方向。柔性材料120可以缠绕地附接到卷管110,使得卷管110的旋转引起柔性材料120沿垂直于纵向方向l和径向方向r延伸的横向方向t围绕卷管110缠绕或从该卷管展开。例如,卷管110的旋转可以使柔性材料120沿横向方向t在升高(例如,打开)位置(例如,如图1中所示)与降低(例如,关闭)位置之间移动。
27.卷管110可以由铝制成。卷管110可以是低挠度卷管并且可以由具有高强度和低密度的材料(诸如碳纤维)制成。卷管110可以具有例如大约两英寸的直径。例如,当柔性材料120具有12英尺的长度和12英尺的宽度(例如,并且卷管110具有12英尺的对应宽度并且直径为两英寸)时,卷管110可表现出小于1/4英寸的挠度。低挠度卷管的示例在2016年11月10日公布的名称为“low-deflection rollershade tube for large openings”的公开号为2016/0326801的美国专利申请中进行了描述,该专利申请的全部公开内容据此通过引用并入本文。
28.柔性材料120可以包括联接到卷管110的第一端(例如,顶端或上端)和联接到下摆杆140的第二端(例如,底端或下端)。下摆杆140可以被构造(例如被加重)为使柔性材料120竖直地悬挂。卷管110的旋转可以使下摆杆140在升高位置与降低位置之间朝向或远离卷管110移动。
29.柔性材料120可以是任何合适的材料,或形成材料的任何组合。例如,柔性材料120可以是“稀松布”、织造布、非织造材料、光控膜、纱窗和/或网。电动窗帘100可以是任何类型的窗帘。例如,电动窗帘100可以是所示的卷帘、柔软的透明帘、帷幔、蜂窝式帘、罗马帘或百叶帘。如图所示,柔性材料120可以是适合用作遮光织物的材料,并且可以替代地称为覆盖材料。柔性材料120不限于遮光织物。例如,根据电动窗帘100作为可伸缩投影屏幕的替代实施方式,柔性材料120可以是适合用于显示投影到柔性材料120上的图像的材料。
30.电动窗帘100可以包括驱动组件(例如,诸如图2和图3中所示的马达驱动单元190)。驱动组件可以至少部分地设置在卷管110内。例如,驱动组件可以保持在容纳在卷管110内的壳体(例如,诸如图2和图3中所示的壳体180)内。驱动组件可以包括控制电路,该控制电路可以包括微处理器并且可以安装到印刷电路板。驱动组件可以由通过电线和/或电池提供的电源(例如,交流电源或直流电源)驱动。电源可以在电动窗帘100的外部或者在电动窗帘100的内部(例如,窗帘组件105的一部分)。例如,电源可以包括卷管110内的电池。驱
动组件可以操作性地联接到卷管110,使得当驱动组件被致动时,卷管110旋转。驱动组件可被构造成使示例性电动窗帘100的卷管110旋转,使得柔性材料120能够在升高位置与降低位置之间操作。驱动组件可被构造成使卷管110旋转,同时降低由驱动组件产生的噪声(例如,由驱动组件的一个或多个齿轮级产生的噪声)。用于电动窗帘的驱动组件的示例在共同转让的2002年12月24日公布的名称为“motorized window shade with ultraquiet motor drive and esd protection”的专利号为6,497,267的美国专利和2017年3月21日公布的名称为“quiet motorized window treatment system”的专利号为9,598,901的美国专利中进行了更详细的描述,两件专利的全部公开内容据此通过引用并入本文。
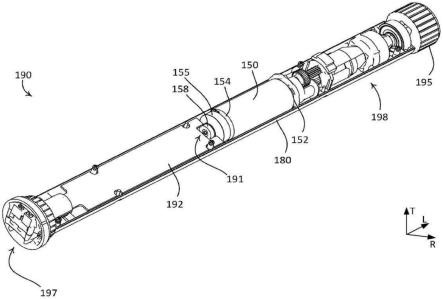
31.图2和图3描绘了被构造用于电动窗帘(例如,诸如图1所示的示例性电动窗帘100)中的示例性马达驱动单元190。图2是马达驱动单元190的透视图。图3是马达驱动单元190的详细视图。马达驱动单元190可以包括壳体180。壳体180可被构造为包围马达驱动单元190的一个或多个部件。电动窗帘的卷管(例如,图1所示的卷管110)可以接收壳体180(例如,其至少一部分)。
32.马达驱动单元190可以包括马达150、印刷电路板192和齿轮组件198。马达驱动单元190可以操作性地联接到卷管110。马达150可以包括驱动轴(例如,诸如图5和图7中所示的驱动轴220、图9和图11中所示的驱动轴320和/或图14中所示的驱动轴520)。驱动轴可以从马达150的驱动端152(例如,前表面)延伸。驱动轴(例如,前轴(未示出))可以是转子(例如,诸如图7中所示的转子250)的一部分,并且可以连接到齿轮组件198。转子可以包括位于马达150的相对侧(例如,非驱动端154)上的后轴156。后轴156可以从马达150的非驱动端154延伸。例如,马达驱动单元190可以包括联接器195(例如,驱动联接器),该联接器可以联接到齿轮组件198以响应于马达150的旋转而使联接器195旋转。例如,联接器195可以是由马达150驱动并将马达150的旋转传递到卷管的输出齿轮。联接器195可以接合卷管(例如,卷管的内表面)。马达驱动单元190的端部分197可被构造为附接到支架130a(例如,由该支架接收),使得马达150对支架130a产生扭矩以使联接器195旋转。马达驱动单元190的端部分197可以接合卷管110(例如,卷管110的内表面)。例如,马达驱动单元190的端部分197可以包括使卷管110能够旋转的轴承(未示出)。卷管110可以与马达150(例如,转子)一起旋转。
33.马达驱动单元190在驱动卷管110时会产生噪声。由马达驱动单元190产生的噪声可能由一个或多个因素引起。例如,当马达150操作时,一个或多个马达部件的轴向移动(例如,在纵向方向l上)可能在马达驱动单元190中产生噪声(例如,附加噪声)。在该示例中,轴向移动可以是轴向转子/轴振荡,其中转子相对于马达150的壳体(例如,诸如图7中所示的马达壳体212、图11中所示的马达壳体312、图14中所示的马达壳体512和/或图16中所示的马达壳体612)在轴向方向上移动。轴向转子/轴振荡可以导致驱动轴和/或后轴156在轴向方向上移动。在该示例中,轴向转子/轴振荡可以产生施加到一个或多个马达部件的轴向力。附加地或替代地,轴向力可以是瞬时或周期性的外力。例如,轴向力可以由电动窗帘的一个或多个部件产生(例如,诸如由齿轮组件198产生并施加到驱动轴/转子的轴向力)。附加地或替代地,轴向力可以由马达150的共振和/或径向摆动(例如,转子在径向方向r和/或横向方向t上的径向移动)产生。马达150的共振和/或径向摆动也可能在转子/轴上产生径向力。由马达150的转子的转子绕组产生的电场的对准和/或强度可以产生轴向力和/或径
向力(例如,转子上稳定且快速的作用力)。当在不同频率下操作和/或当在不同方向上操作时,马达驱动单元190可以产生变化的噪声水平(例如,振幅)。可能期望降低在某些频率(例如,诸如800hz)下的噪声(例如,振幅)。
34.马达驱动单元190可以包括轴稳定构件155。轴稳定构件155可以被构造成降低马达驱动单元190在特定频率(例如,大约300hz至1khz)下的(例如,由其产生)的噪声水平。例如,轴稳定构件155可以被构造成使得当马达150操作时,马达驱动单元190的噪声水平在一个或多个频率下低于10分贝。轴稳定构件155可以被构造成调整转子/轴轴向振荡的固有频率(例如,调整到在马达150的操作期间将不会被激励的频率)。轴稳定构件155可以被构造成抑制轴向力和/或径向力。例如,轴稳定构件155可以增加轴的质量,并因此增加转子的质量,以抑制轴向力,使得转子比没有轴稳定构件155时移动更短的距离(例如,在纵向方向l上)。
35.马达150的后轴156可以承载轴稳定构件155,使得轴稳定构件155与转子、驱动轴和后轴156一起旋转。轴稳定构件155可以是例如可以附接到后轴156的平衡质量。例如,轴稳定构件155可以压配合到后轴156上。轴稳定构件155可以是对称质量,其被构造成将转子、驱动轴和后轴156保持在纵向轴线上。例如,轴稳定构件155可以抵抗转子、驱动轴和/或后轴156上的轴向力和/或径向力,从而降低噪声。另外,轴稳定构件155可以抵抗转子、驱动轴和/或后轴156的轴向移动和/或径向移动,从而降低噪声。使轴稳定构件155旋转可以产生惯性矩,所述惯性矩使得转子、驱动轴和/或后轴155难以进行小的移动(例如,轴向移动和/或径向移动)。例如,当轴稳定构件155旋转时,其惯性可以抵抗偏离其旋转轴线的移动。轴稳定构件155可以位于磁环158与马达150之间,如图2和图3中所示。尽管轴稳定构件155被示出在后轴156上,但是应当理解,轴稳定构件155可以位于马达150的相对侧上(例如,在驱动轴或前轴上)。在这种情况下,驱动轴可以例如在马达150与齿轮组件198之间承载轴稳定构件155。还应当理解,轴稳定构件155可以被实施为两个部分。当轴稳定构件155被实施为两个部分时,驱动轴或前轴可以承载轴稳定构件155的第一平衡质量,并且后轴156可以承载轴稳定构件155的第二平衡质量。还应当理解,轴稳定构件155可以被实施为齿轮组件198的一部分。
36.马达150可以包括一个或多个马达端子157。马达端子157可以被构造成将马达150电连接到印刷电路板192。例如,一根或多根马达电线159可以将马达端子157电连接到印刷电路板192。印刷电路板192可以被构造成接收磁环158和/或轴稳定构件155的至少一部分。例如,印刷电路板192可以沿着靠近马达150的边缘193限定凹口191。凹口191可以被构造成使得磁环158和/或轴稳定构件155延伸超过边缘193。凹口191可以被构造成例如经由磁环158实现角位置检测和/或旋转速度测量。
37.磁环158可以靠近印刷电路板192。磁环158可以被构造成能够检测后轴156和/或转子的位置(例如,角位置)。磁环158可以被构造成能够测量后轴156和/或转子的旋转速度。例如,当马达150操作时,磁环158可以将磁场导向印刷电路板192。印刷电路板192上的一个或多个部件可以被构造成检测从磁环158引导的磁场,并确定后轴156和/或转子的角位置和/或旋转速度。例如,马达驱动单元190可以包括安装到印刷电路板192的旋转位置感测电路194。旋转位置感测电路194可以包括例如磁感测电路,诸如霍尔效应传感器,其可以被实施成安装在印刷电路板192上的双通道霍尔效应传感器集成电路。旋转位置感测电路
194可以检测由磁环158产生和/或引导的磁场。
38.图4至图7描绘了具有轴稳定构件240(例如,诸如图2至图3中所示的轴稳定构件155)的示例性马达组件200。马达组件200可以被构造成用于电动窗帘(例如,诸如图1中所示的电动窗帘100)中的马达驱动单元(例如,诸如图2和图3中所示的马达驱动单元190)中。马达组件200可以包括马达210、磁环230、轴稳定构件240和马达端子255。马达210可以包括马达壳体212、转子250和围绕转子250的一个或多个永磁体260。转子250可以限定一个或多个横截面减小的区域(例如,马达壳体212内)。换句话说,转子250可以包括例如在马达壳体212内的阶梯轴。例如,转子250可以限定驱动端转子部分252和非驱动端转子部分254。
39.转子250可以包括在纵向方向l上从驱动端转子部分252延伸(例如,穿过马达壳体212)的驱动轴220(例如,前轴)。转子250可以包括在纵向方向l上从非驱动端转子部分254延伸(例如,穿过马达壳体212)的后轴225。驱动轴220和后轴225可以与转子250一起旋转。驱动轴220可以操作性地联接到(例如,接合)马达驱动单元的齿轮组件(例如,图2中所示的齿轮组件198)。
40.马达组件200可以包括驱动端衬套270和非驱动端衬套280。驱动端衬套270可以被构造成接收驱动轴220,以维持驱动轴220和/或转子250的对准。例如,驱动轴220可以延伸穿过驱动端衬套270。非驱动端衬套280可以被构造成接收后轴225,以维持后轴225和/或转子250的对准。例如,后轴225可以延伸穿过非驱动端衬套280。当转子250旋转时,驱动端转子部分252可以被构造成补偿轴向移动。例如,驱动端转子部分252和驱动端衬套270的后表面272之间的距离d3以及非驱动端转子部分254与非驱动端衬套280的后表面282之间的距离d4可以在马达210的操作期间变化。例如,在转子250(例如,驱动端转子部分252)与驱动端衬套270之间可以存在驱动端间隙251,并且在转子250(例如,非驱动端转子部分254与非驱动端转子部分254)之间可以存在非驱动端间隙253。驱动端间隙251可以限定距离d3,并且非驱动端间隙253可以限定距离d4。距离d3和距离d4可以相反地变化。例如,距离d3可以随着距离d4的减小而增大,反之亦然。例如,由于驱动端转子部分252与驱动端衬套270之间的接触和/或非驱动端转子部分254与非驱动端衬套280之间的接触,转子250的轴向移动可能在马达210操作时产生噪声。
41.轴稳定构件240可以是对称的平衡质量,其被构造成当马达210操作时保持转子250、驱动轴220和后轴225与纵向轴线对准。例如,轴稳定构件240可以抵抗转子250、驱动轴220和/或后轴225上的轴向力和/或径向力,使得噪声降低(例如,当操作时低于10分贝)。另外,轴稳定构件240可以抵抗转子250、驱动轴220和/或后轴225的轴向移动和/或径向移动,从而降低噪声。使轴稳定构件240旋转可以产生惯性矩,所述惯性矩使得转子250、驱动轴220和/或后轴225难以进行小的移动(例如,轴向移动和/或径向移动)。例如,当轴稳定构件240旋转时,其惯性可以抵抗偏离其旋转轴线的移动。例如,轴稳定构件240可以降低由马达210和/或马达驱动单元的一个或多个其他部件在可以包括一个或多个固有频率的某些频率(例如,大约300hz至2.5khz)下产生的噪声。轴稳定构件240可以被构造成调整转子轴向振荡的固有频率(例如,调整到在马达210的操作期间将不会被激励的频率)。例如,轴稳定构件240可以被构造成减小在一个或多个频率和/或节奏(例如,大约5hz至40hz)下的转子轴向运动。轴稳定构件240可以被构造成抑制例如由轴向力和/或径向力引起的转子250的轴向运动和/或径向运动。例如,轴稳定构件240可以增加后轴225的质量,并因此转子250的
质量,以抑制轴向力,使得转子250比没有轴稳定构件240时移动更短的轴向距离。使轴稳定构件240旋转可以产生惯性矩,所述惯性矩使得转子250、驱动轴220和/或后轴225难以进行小的移动(例如,轴向移动和/或径向移动)。例如,轴稳定构件240可以减小转子250在轴向力和/或径向力下移动的轴向距离和/或径向距离。轴稳定构件240可以被构造成调整马达210的共振频率,例如以避免在马达210的操作期间发生共振。
42.后轴225可以承载轴稳定构件240和/或磁环230。例如,轴稳定构件240可以压配合到后轴225上。轴稳定构件240可以位于磁环230与马达210之间。轴稳定构件240可以被构造和/或定位在后轴225上,以能够接近马达端子255,用于对其进行电连接。例如,轴稳定构件240的大小和/或形状可被设置成能够接近马达端子255。
43.轴稳定构件240可以限定光滑的外表面。轴稳定构件240可以限定圆形横截面。轴稳定构件240可以限定具有第一直径d1的第一部分242和具有第二直径d2的第二部分244。例如,如图4中所示,第二直径d2可以小于第一直径d1。虽然图中显示第二直径d2小于第一直径d1,但是应当理解,第二直径d2可以等于d1。第二部分244(例如,第二直径d2)可以是锥形部分,该锥形部分被构造成接收在马达印刷电路板的凹口(例如,诸如图2和图3中所示的马达印刷电路板192的凹口191)内。例如,第二部分244可以使轴稳定构件240能够在装配在马达210与马达印刷电路板之间的空间中时具有抑制后轴225上的径向力和/或轴向力所需的质量。马达印刷电路板中的凹口可以容纳(例如,至少部分地接收)磁环230和第二部分244。尽管轴稳定构件240被示出为具有靠近马达210的第一部分242和远离马达210的第二部分244,但是应当理解,轴稳定构件240可以以相反的方向进行定向,即第二部分244靠近马达210并且第一部分242远离马达210。尽管轴稳定部件240被示出为具有圆形横截面,但是应当理解,轴稳定部件240可以例如限定替代形状的横截面,例如,诸如中空圆柱体,具有辐条系统的环/箍形状,具有均匀间隔臂的十字/星形等。
44.尽管轴稳定构件240被示出在后轴225上,但是应当理解,轴稳定构件240可以位于驱动轴220上。尽管磁环230被示出在轴稳定构件240的非马达侧上,但是应当理解,磁环230可以在马达250与轴稳定构件240之间位于后轴225上。当磁环230位于
45.马达驱动单元在操作(例如,驱动卷管)时可能产生噪声。由马达驱动单元产生的噪声可能由一个或多个因素引起。例如,当马达210操作时,转子250的轴向移动(例如,在纵向方向l)可能在马达驱动单元中产生噪声(例如,附加噪声)。在该示例中,施加到转子250的轴向力可以推动和/或拉动转子250与驱动端衬套270或非驱动端衬套280接触。当马达210操作时,转子250与驱动端衬套270和/或非驱动端衬套280之间的接触可能是增加的噪声的来源。例如,当轴向力是恒力时,马达壳体212和/或衬套270、280可充当弹簧。转子250可以在恒定轴向力下例如在与驱动端衬套270或非驱动端衬套280接触或不接触的情况下在纵向方向l上振荡。轴向力可以是瞬时或周期性的外力。例如,轴向力可以由马达驱动单元的一个或多个部件(例如,如图2中所示的齿轮组件198)产生。附加地或替代地,轴向力可以由马达210的共振和/或径向摆动(例如,转子250的径向移动)产生。由转子250的转子绕组产生的电场的对准和/或强度可以产生轴向力(例如,转子250上稳定且快速的作用力)。电场强度和对准可以取决于转子250的几何形状、转子绕组中的电流和/或转子250的角位置。
46.图8至图11描绘了具有另一示例性轴稳定构件340的示例性马达组件300。马达组
件300可以被构造成用于马达驱动单元(例如,诸如图2和图3中所示的马达驱动单元190)。马达组件300可以包括马达310、轴稳定构件340和马达引线350。马达310可以包括马达壳体312、转子350和至少部分地围绕转子350的一个或多个永磁体360。转子350可以限定一个或多个横截面减小的区域(例如,马达壳体312内)。换句话说,转子350可以包括例如在马达壳体312内的阶梯轴。例如,转子350可以限定驱动端转子部分352和非驱动端转子部分354。转子350可以限定在纵向方向l上从驱动端转子部分352延伸(例如,穿过马达壳体312)的驱动轴320(例如,前轴)。转子350可以限定在纵向方向l上从非驱动端转子部分354延伸(例如,穿过马达壳体312)的后轴325。
47.马达组件300可以包括驱动端衬套370和非驱动端衬套380。驱动端衬套370可以被构造成接收驱动轴320,以维持驱动轴320和/或转子350的对准。例如,驱动轴320可以延伸穿过驱动端衬套370。非驱动端衬套380可以被构造成接收后轴325,以维持后轴325和/或转子350的对准。例如,后轴325可以延伸穿过非驱动端衬套380。当转子350旋转时,驱动端转子部分352可以被构造成补偿轴向移动。例如,驱动端转子部分352和驱动端衬套370的后表面372之间的距离d7以及非驱动端转子部分354与非驱动端衬套380的后表面382之间的距离d8可以在马达310的操作期间变化。例如,在转子350(例如,驱动端转子部分352)与驱动端衬套370之间可以存在驱动端间隙351,并且在转子350(例如,非驱动端转子部分354)与非驱动端转子部分354之间可以存在非驱动端间隙353。驱动端间隙351可以是由距离d7限定的气隙,并且非驱动端间隙353可以是由距离d8限定的气隙。距离d7和距离d8可以相反地变化。例如,距离d7可以随着距离d8的减小而增大,反之亦然。例如,由于驱动端转子部分352与驱动端衬套370之间的接触和/或非驱动端转子部分354与非驱动端衬套380之间的接触,转子350的轴向移动可能在马达310操作时产生噪声。
48.轴稳定构件340可以是对称的平衡质量,其被构造成当马达310操作时保持转子350、驱动轴320和后轴325与纵向轴线对准。例如,轴稳定构件340可以抵抗转子350、驱动轴320和/或后轴325上的轴向力和/或径向力,使得噪声降低(例如,当操作时低于10分贝)。另外,轴稳定构件340可以抵抗转子350、驱动轴320和/或后轴325的轴向移动和/或径向移动,从而降低噪声。使轴稳定构件340旋转可以产生惯性矩,所述惯性矩使得转子350、驱动轴320和/或后轴325难以进行小的移动(例如,轴向移动和/或径向移动)。例如,当轴稳定构件340旋转时,其惯性可以抵抗偏离其旋转轴线的移动。例如,轴稳定构件340可以降低由马达310和/或电动窗帘的一个或多个其他部件在可以包括一个或多个固有频率的某些频率(例如,大约300hz至1khz)下产生的噪声。轴稳定构件340可以被构造成调整转子轴向振荡的固有频率(例如,调整到在马达310的操作期间将不会被激励的频率)。轴稳定构件340可以被构造成抑制轴向力。例如,轴稳定构件340可以增加后轴325的质量,并因此增加转子350的质量,以抑制轴向力,使得转子350比没有轴稳定构件340时移动更短的轴向距离(例如,在纵向方向l上)。使轴稳定构件340旋转可以产生惯性矩,所述惯性矩使得转子350、驱动轴320和/或后轴325难以进行小的移动(例如,轴向移动和/或径向移动)。例如,轴稳定构件340可以减小转子350在轴向力和/或径向力下移动的轴向距离和/或径向距离。轴稳定构件340可以被构造成调整马达310的共振频率,例如以避免在马达310的操作期间发生共振。
49.轴稳定构件340可以被构造成产生磁场和/或引导磁场朝向马达印刷电路板(例如,图2和图3中所示的马达印刷电路板192)上的旋转位置感测电路。例如,轴稳定构件340
可以包括磁性材料。例如,轴稳定构件340可以结合图3至图6中所示的轴稳定构件240和磁环230的功能。也就是说,与轴稳定构件240和马达组件200相比,将轴稳定构件340结合到马达组件300中可以减少马达组件300的部件数量。
50.后轴325可以承载轴稳定构件340。例如,轴稳定构件340可以压配合到后轴325上。轴稳定构件340可以被构造和/或定位在后轴325上,以能够接近马达引线350,用于对其进行电连接。
51.轴稳定构件340可以限定具有第一直径d5的第一部分342和具有第二直径d6的第二部分344。例如,如图8中所示,第二直径d6可以小于第一直径d5。第二部分344(例如,第二直径d6)可以是锥形部分,该锥形部分被构造成接收在马达印刷电路板的凹口(例如,图2和图3中所示的马达印刷电路板192上的凹口191)内。马达印刷电路板中的凹口可以容纳(例如,至少部分地接收)第二部分344。尽管轴稳定构件340被示出为具有靠近马达310的第一部分342和远离马达310的第二部分344,但是应当理解,轴稳定构件340可以以相反的方向进行定向,即第二部分344靠近马达310并且第一部分342远离马达310。
52.图12至图13描绘了具有延伸部(例如,弹簧夹470)的另一示例性马达驱动单元400,该延伸部被构造成向后轴450施加径向力。马达驱动单元400可以被构造成用于电动窗帘(例如,图1中所示的电动窗帘100)中。马达驱动单元400可以包括壳体440(例如,其轮廓由图12中的虚线示出)。壳体440可以被构造为包围马达驱动单元400的一个或多个部件。电动窗帘的卷管(例如,图1所示的卷管110)可以接收壳体400(例如,其至少一部分)。
53.马达驱动单元400可以包括马达410(例如,诸如图2至图3中所示的马达150、图4至图7中所示的马达210和/或图8至图11中所示的马达310)、印刷电路板(例如,诸如图2和图3中所示的印刷电路板192)和齿轮组件420(例如,诸如齿轮组件198)。马达驱动单元400可以操作性地联接到电动窗帘的卷管。例如,马达驱动单元400可以包括联接器(未示出)。联接器可以接合卷管(例如,卷管的内表面),使得马达410的旋转被传递到卷管(例如,以与联接器195类似的方式)。马达410可以包括驱动轴(例如,诸如图4、图5和图7中所示的驱动轴220和/或图8、图9和图11中所示的驱动轴320)。驱动轴可以从马达410的前表面412(例如,驱动端)延伸。马达410可以包括从马达410的后表面414(例如,非驱动端)延伸的后轴450。
54.马达驱动单元400可以包括磁环460(例如,诸如磁环158和/或图4至图7中所示的磁环230)。后轴450可以承载磁环460,该磁环可以与后轴450一起旋转。磁环460可以被构造成能够检测后轴450和/或转子的位置(例如,角位置)。磁环460可以被构造成能够测量后轴450和/或转子的旋转速度。例如,磁环460可以将磁场导向马达印刷电路板上的旋转位置感测电路。
55.弹簧夹470可以被构造成接收在马达驱动单元400(例如,壳体440)内。弹簧夹470可以被构造成在马达410(例如,后表面414)与磁环460之间的点或位置处邻接后轴450。例如,当马达410操作时,弹簧夹470可以保持与后轴450接触。弹簧夹470可以被构造成向马达410的后轴450施加径向力。径向力可以被构造成在垂直于纵向方向l的方向上使后轴450偏置。例如,弹簧夹470可以在径向方向r和/或横向方向t上施加径向力。弹簧夹470可以是柔顺的(例如,弹性变形),使得弹簧夹470可以楔入在壳体440的内表面442与后轴450之间。例如,弹簧夹470可以是塑料、碳纤维、复合材料和/或类似物。在径向方向r和/或横向方向t上使后轴450偏置可以在马达410操作时降低马达驱动单元400在一个或多个频率下的噪声水
平。例如,马达驱动单元400的噪声水平可以在一个或多个频率(例如,大约300khz至1khz)下保持低于大约10db。例如,弹簧夹470可以被构造成抑制马达驱动单元400内的轴向力或径向摆动中的一个或多个。
56.弹簧夹470可以限定基部472、从基部472延伸的臂474a、474b和从基部472延伸的平台476。基部472可以限定具有边缘473a、473b的凹形形状,所述边缘被构造成邻接壳体440的内表面442。例如,当弹簧夹470邻接后轴450时,边缘473a、473b可以被构造成邻接壳体440的内表面442。臂474a、474b可以是弯曲的以与壳体440的内表面442相对应。例如,当弹簧夹470邻接后轴450时,臂474a、474b可以邻接内表面442。基部472的凹形形状可以被构造成将臂474a、474b偏置在壳体440的内表面442上。平台476可以是被构造成邻接后轴450的延伸部。平台476可以包括一对圆形(例如,凸形)表面478a、478b,所述一对圆形表面限定被构造成接收后轴450的凹槽475。尽管凹槽475被示出为两个圆柱体形状之间的空间,但是应当理解,凹槽475可以限定替代形状,例如,诸如圆形、半圆形、多边形等。例如,当马达410操作时,后轴450可以邻接圆形表面478a、478b。径向力可以经由平台476的圆形表面478a、478b施加到后轴450。例如,弹簧夹470的大小可以被构造成楔入在后轴450与壳体440的内表面442之间。臂474a、474b可以被捕获在马达410与马达印刷电路板之间,例如,使得弹簧夹470被保持在适当位置。
57.应当理解,弹簧夹470可以与壳体440成一体。例如,壳体440可以限定延伸部(例如,诸如平台476),该延伸部被构造成邻接后轴450。附加地或替代地,延伸部可以附接(例如,可移除地附接)到壳体440的内表面。
58.图14至图15描绘了具有不对称的永磁体510、515的示例性马达500。马达500可以被构造成用于电动窗帘(例如,诸如图1中所示的电动窗帘100)中的马达驱动单元(例如,诸如图2和图3中所示的马达驱动单元190)中。马达500可以包括马达壳体512、转子550和至少部分地围绕转子550的一个或多个永磁体510、515。转子550可以限定一个或多个横截面减小的区域(例如,马达壳体512内)。换句话说,转子550可以包括阶梯轴。例如,转子550可以限定驱动端转子部分552和非驱动端转子部分554。转子550可以限定在纵向方向l上从驱动端转子部分552延伸(例如,穿过马达壳体512)的驱动轴520。转子550可以限定在纵向方向l上从非驱动端转子部分554延伸(例如,穿过马达壳体512)的后轴525。
59.马达500可以包括驱动端衬套570和非驱动端衬套580。驱动端衬套570可以被构造成接收驱动轴520,以维持驱动轴520和/或转子550的对准。例如,驱动轴520可以延伸穿过驱动端衬套570。非驱动端衬套580可以被构造成接收后轴525,以维持后轴525和/或转子550的对准。例如,后轴525可以延伸穿过非驱动端衬套580。
60.永磁体510、515可以是不对称的。例如,永磁体510、515可以限定具有不同物理特性的半月形。永磁体510、515可以是相同的材料。附加地或替代地,永磁体510、515可以被构造成产生不对称磁场。例如,上永磁体510可以产生第一磁场,并且下永磁体515可以产生第二磁场。第一磁场可以不同于(例如,大于)第二磁场。上永磁体510可以是具有第一质量的北磁体,并且下永磁体515可以是具有第二质量的南磁体。第一质量可以大于第二质量。上永磁体510和下永磁体515可以具有不同的厚度。上永磁马达510可以具有厚度d9,并且下永磁体515可以具有厚度d10。厚度d9可以大于厚度d10。换句话说,上永磁体510可以比下永磁马达515厚。上永磁体510和下永磁体515可以被构造成向转子550施加径向力(例如,在永磁
体510、515之间)。例如,上永磁体510和下永磁体515可以产生具有不同磁力的相应磁场。不同磁力可能导致转子550上的径向力。径向力可以使转子550从纵向轴线偏置(例如,在径向方向r和/或横向方向t上)。径向力(例如,不对称永磁体510、515)可以被构造成调整转子轴向振荡的固有频率,抑制转子550的径向摆动,和/或抑制转子550上的轴向力。径向力可以由永磁体510、515的不同质量和/或厚度产生。尽管马达500被示出为具有上永磁体510和下永磁体515,但是应当理解,马达500可以包括导致不相等磁力的替代磁体设计,例如,诸如在转子550的每一侧上有几个半月形,在转子的每一侧上有几个条带等。
61.图16描绘了具有永磁体610、615的示例性马达600。马达600可以被构造成用于电动窗帘(例如,诸如图1中所示的电动窗帘100)中的马达驱动单元(例如,诸如图2和图3中所示的马达驱动单元190)中。马达600可以包括马达壳体612、转子650和至少部分地围绕转子650的一个或多个永磁体610、615。转子650可以限定一个或多个横截面减小的区域(例如,马达壳体612内)。换句话说,转子650可以包括阶梯轴。例如,转子650可以限定驱动端转子部分652和非驱动端转子部分654。转子650可以限定在纵向方向l上从驱动端转子部分652延伸(例如,穿过马达壳体612)的驱动轴620。转子650可以限定在纵向方向l上从非驱动端转子部分654延伸(例如,穿过马达壳体612)的后轴625。
62.马达600可以包括驱动端衬套670和非驱动端衬套680。驱动端衬套670可以被构造成接收驱动轴620,以维持驱动轴620和/或转子650的对准。例如,驱动轴620可以延伸穿过驱动端衬套670。非驱动端衬套680可以被构造成接收后轴625,以维持后轴625和/或转子650的对准。例如,后轴625可以延伸穿过非驱动端衬套680。
63.永磁体610、615可以是对称的。例如,永磁体610、615可以限定具有相同物理特性的半月形。永磁体610、615可以是相同的材料。附加地或替代地,永磁体610、615可以被构造成产生对称磁场。例如,上永磁体610可以产生第一磁场,并且下永磁体615可以产生第二磁场。第一磁场可以与第二磁场基本上相同。上永磁体610可以是具有第一质量的北磁体,并且下永磁体615可以是具有第二质量的南磁体。第一质量可以基本上等于第二质量。上永磁体610和下永磁体615可以具有相同的厚度。上永磁马达610可以具有厚度d11,并且下永磁体615可以具有厚度d12。替代地,类似于图14中所示的永磁体510、515,厚度d11可以大于厚度d12。
64.马达600可以包括外磁体690。后轴625可以是磁性材料,使得外磁体690在后轴625上施加磁力。磁力可以导致施加在后轴625上并因此施加在转子650上的径向力。径向力可以使转子650从纵向轴线偏置(例如,在径向方向r和/或横向方向t上)。径向力可以被构造成调整转子轴向振荡的固有频率,抑制转子650的径向摆动,和/或抑制转子650上的轴向力。尽管马达600被示出为在后轴625的上侧具有外磁体690,但是应当理解,外磁体690可以位于后轴625的下侧上。尽管马达600被示出为具有单个外磁体690,但是应当理解,马达600可以包括多个外磁体,所述多个外磁体导致施加在后轴625上并因此施加在转子650上的不相等的磁力。尽管马达600被示出为具有位于后轴625附近的外磁体690,但是应当理解,外磁体690可以位于驱动轴620附近(例如,在马达600和齿轮组件(例如,诸如图2中所示的齿轮组件198)之间,使得外磁体690在驱动轴620上施加磁力。
65.可以使用一种或多种其他技术来实现径向抑制和/或轴向抑制。例如,马达驱动单元可以包括附接到马达驱动单元的壳体的内表面的一个或多个磁体。一个或多个磁体可以
靠近马达驱动单元的马达的后轴附接到壳体的内表面。一个或多个磁体可以被构造成吸引或排斥后轴,例如以抑制马达驱动单元内的一个或多个径向力和/或轴向力。例如,一个或多个磁体可以被构造成通过施加不相等的磁场/力使后轴从纵向方向偏置。
66.在示例中,马达驱动单元可以包括磁制动器。磁制动器可以由马达驱动单元的马达的驱动轴(例如,前轴)或后轴承载。磁制动器内的磁体可以被布置成使得来自相邻磁体的切向线性力分量在驱动轴或后轴上施加径向力。由磁制动器内的磁体施加的径向力可以被构造成调整转子轴向振荡的固有频率,抑制马达驱动单元内的径向摆动,和/或抑制马达驱动单元内的轴向力。
67.尽管本文以特定组合描述了特征和元件,但每个特征或元件可以单独使用或与其他特征和元件以任何组合使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1