一种外科无菌全自动洗手机
1.本发明涉及医用清洁设备领域,具体为外科无菌全自动洗手机。
背景技术:
2.保持手部卫生在临床工作中至关重要,尤其在进行外科手术前,医护人员需要进行严格的手部清洁和消毒,目前常用的手部清洗方式为七步洗手法。在进行外科洗手前需要摘除手部饰物,并修剪指甲,按照如下步骤进行手部的清洁和消毒:先取用清洁剂按照七步洗手法揉搓双手、腕部、前臂以及上臂下1/3(肘上10cm左右)处皮肤,采用流动水清洗;再取消毒液按照七步洗手法揉搓双手、腕部、前臂以及上臂下1/3(肘上10cm左右)处皮肤,持续2-3分钟,采用流动水清洗;然后取无菌毛巾按照从手到肘的方向擦干,最后再次取用消毒剂揉搓双手及前臂至干,即完成外科洗手操作。在整个洗手消毒过程中,双手不能下垂,并保持拱手姿势,不能接触未经消毒的物品。
3.医生片普遍认为目前的外科洗手方式步骤过于复杂,动作过于繁琐,而进行连台手术时,每术后摘除手套后,都需要重新进行繁琐的外科洗手操作,增大了医生的疲劳程度和心理压力。
技术实现要素:
4.本发明的目的是针对上述背景技术中存在的问题,提供一种外科无菌全自动洗手机,只需将双手以拱起的姿势伸入该洗手机中,便可以自动进行手部、腕部和前臂的清洗,并配合喷施流水、清洁剂和消毒剂,达到外科洗手所需效果,省力高效。
5.为了实现上述发明目的,本发明采用了以下技术方案:一种外科无菌全自动洗手机,包括机身主体,机身主体内部设有刷洗装置、冲液系统和用于驱动所述刷洗装置工作的驱动机构,机身主体内部设有左手冲洗腔和右手冲洗腔,左手冲洗腔和右手冲洗腔关于竖直平面对称且朝向相反方向侧倾设置,机身下端设有左手伸入口和右手伸入口,左手伸入口和右手伸入口分别对齐左手冲洗腔和右手冲洗腔设置,刷洗装置包括两个刷手机构,两个刷手机构分别设于左手冲洗腔和右手冲洗腔中,刷手机构包括有多个刷杆,左手冲洗腔中的多个刷杆围绕左手伸入口分布,右手冲洗腔中的多个刷杆围绕右手伸入口分布,刷杆包括活动杆和设于所述活动杆上的刷毛,驱动机构用于驱动活动杆运动以形成刷洗动作;冲液系统包括水喷头、洗手液喷头、消毒液喷头以及用于控制上述三种喷头的泵系统,水喷头、洗手液喷头和消毒液喷头分布于左手冲洗腔和右手冲洗腔内壁,水喷头、洗手液喷头和消毒液喷头分别通过独立的内部管路连接至外部水源、洗手液容器和消毒液容器,泵系统设于水喷头、洗手液喷头和消毒液喷头所连接的内部管路上。
6.与现有技术相比,采用了上述技术方案的外科无菌全自动洗手机具有如下有益效果:
一、左手冲洗腔和右手冲洗腔对称且朝向相反方向倾斜,双手可以拱起的姿势伸入洗手机中,模拟出正确的外科洗手姿势,有利于提升清洗效果;左手冲洗腔和右手冲洗腔中均设有自动形成刷洗动作的刷杆,配合喷出的水、清洗剂和消毒液,使用者无需自己进行搓洗动作,也无需自行取用清洗剂和消毒液,便可以完成整个外科洗手工作,使得外科洗手过程简单便捷化。
7.二、冲液系统的水喷头、洗手液喷头、消毒液喷头分布于左手冲洗腔和右手冲洗腔内壁,洗手时喷向刷杆以及通过刷杆之间的缝隙喷向手部,伴随刷杆的运动能够使清水、洗手液和消毒液充分接触手部与小臂皮肤,提升清洗效果;泵系统可以控制上述三种喷头的喷出顺序、喷出时长以及喷出量,以模拟正确的外科洗手过程。
8.优选的,活动杆包括相互套设的内筒和外筒,内筒和外筒之间设有用于限制内筒仅沿外筒轴向滑动的限制结构,外筒的筒壁周向等距开设有多个长形槽孔,长形槽孔沿外筒轴线延伸,内筒和外筒的筒壁均设有刷毛,内筒的刷毛穿过所述长形槽孔向外伸出;驱动机构包括有伺服电机,外筒直接连接伺服电机或通过传动结构与伺服电机建立传动关系;内筒连接有往复导向结构,往复导向结构用于在外筒旋转的同时使内筒作轴向往复运动。
9.优选的,往复导向结构包括导向柱和导向槽,导向柱表面环绕设置有波浪形槽,导向柱与内筒同轴心固定连接,导向槽内壁设有导向凸块,导向槽固定设于机身主体内部,所述导向柱嵌入导向槽中且可沿导向槽轴向滑动,同时导向凸块嵌入波浪形槽中。
10.通过上述结构,在驱动外筒旋转的同时,内筒可沿着外筒的轴向方向作往复运动,使得外筒上的刷毛在平面旋转进行横扫刷洗,内筒上的刷毛在进行横扫刷洗的同时还可以进行纵向的刷洗,使得手指间缝隙、掌纹凹陷均可以得到充分的刷洗,提升清洁效果。
11.优选的,每个刷手机构均包括至少六个刷杆,且刷杆的数量为偶数个;左手伸入口和右手伸入口均为适应手掌横截面形状的圆角矩形开口,左手伸入口和右手伸入口的两个长边侧分别设有至少两个刷杆,左手伸入口和右手伸入口的两个短边侧分别设有至少一个刷杆。有利于对掌心、掌背以及手掌较窄的两侧进行充分的刷洗。
12.优选的,相邻刷杆上的刷毛在刷杆的轴向方向上相互错开设置,避免刷毛之间长时间触碰摩擦而受损。
13.优选的,驱动机构还包括有用于实现刷手机构中所有刷杆同部旋转的传动带,刷手机构的所有刷杆同时连接传动带,刷杆的外筒端部设有外齿轮杆,传动带内壁设有内锯齿面,外齿轮杆与传动带的锯齿面相啮合;在每一刷手机构中,其中一个刷杆的外筒连接伺服电机。仅驱动刷手机构中一个刷杆便可以带动该刷手机构中所有刷杆同步运动。
14.优选的,机身主体由洗手包围壳和控制壳体构成,左手冲洗腔、右手冲洗腔、水喷头、洗手液喷头和消毒液喷头均位于洗手包围壳中,驱动机构和泵系统均位于控制壳体中,洗手包围壳相对于控制壳体倾斜设置,机身主体配备有安装板,机身主体可通过安装板固定于竖直壁面,且机身主体固定于竖直壁面时,左手伸入口和右手伸入口朝向下前方。人在进行外科洗手时习惯双手朝向斜上方的姿势,洗手包围壳的倾斜方式更适合于外科洗手习惯。
15.优选的,机身主体还设有用于检测手部金属饰物的金属探测装置,左手伸入口和右手伸入口均位于金属探测装置的感应区域中。能够有效避免医生意外忘记取下手部金属饰物。
附图说明
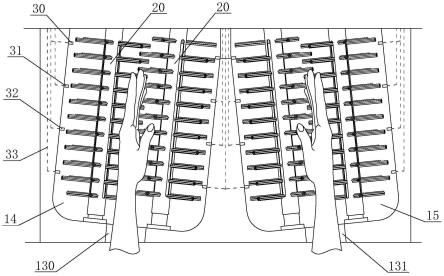
16.图1为本发明外科无菌全自动洗手机实施例的结构示意图。
17.图2为本实施例的结构示意图(底部视角)。
18.图3为本实施例的结构示意图(背部视角)。
19.图4为本实施例中刷杆的结构示意图。
20.图5为本实施例中内筒和外筒的配合示意图。
21.图6为本实施例中往复导向结构的结构示意图。
22.图7为本实施例中两个刷手机构的位置示意图。
23.图8为本实施例中左手冲洗腔和右手冲洗腔的设置方式示意图。
24.图9为本实施例中冲液系统的结构示意图。
25.图10为本实施例中同一刷手机构中刷杆的分布及连动关系示意图。
26.附图标记:1、机身主体;10、包围壳;11、控制壳体;12、安装板;13、底板;130、左手伸入口;131、右手伸入口;14、左手冲洗腔;15、右手冲洗腔;2、刷手机构;20、刷杆;200、活动杆;2001、内筒;2002、外筒;20020、长形槽孔;201、刷毛;202、外齿轮杆;203、导向柱;2030、波浪形槽;204、导向槽;2040、导向凸块;3、冲液系统;30、水喷头;300、进水接口;31、洗手液喷头;310、洗手液接口;32、消毒液喷头;320、消毒液接口;33、内部管路;34、增压自吸泵a;35、增压自吸泵b;36、增压自吸泵c;4、驱动机构;40、伺服电机;41、传动带。
具体实施方式
27.下面结合附图对本发明做进一步描述。
28.如图1至图10所示的外科无菌全自动洗手机,包括机身主体1,机身主体1由洗手包围壳10和控制壳体11构成,洗手包围壳10相对于控制壳体11倾斜设置,机身主体1还配备有安装板12,机身主体1可通过安装板12固定于竖直壁面(如墙面)上;洗手包围壳10内部设有左手冲洗腔14和右手冲洗腔15,左手冲洗腔14和右手冲洗腔15关于竖直平面对称且朝向相反方向侧倾设置,洗手包围壳10下端设有底板13,底板13设置在左手冲洗腔14和右手冲洗腔15的下方入口,底板13在对应左手冲洗腔14和右手冲洗腔15的位置处分别开设有左手伸入口130和右手伸入口131,在机身主体1固定于竖直壁面时,左手伸入口130和右手伸入口131朝向下前方。
29.机身主体1内部设有刷洗装置、冲液系统3和用于驱动刷洗装置工作的驱动机构4,驱动机构4包括伺服电机40和传动带41,刷洗装置包括两个刷手机构2,两个刷手机构2分别设于左手冲洗腔14和右手冲洗腔15中,刷手机构2包括有十个刷杆20,左手冲洗腔14中的十个刷杆20围绕左手伸入口130分布,右手冲洗腔15中的十个刷杆20围绕右手伸入口131分布。
30.刷杆20包括活动杆200和设于活动杆200上的刷毛201,活动杆200包括相互套设的内筒2001和外筒2002,内筒2001和外筒2002之间设有用于限制内筒2001仅沿外筒2002轴向滑动的限制结构,外筒2002的筒壁周向等距开设有三个长形槽孔20020,长形槽孔20020沿外筒2002轴线延伸,内筒2001和外筒2002的筒壁均设有刷毛201,内筒2001的刷毛201穿过长形槽孔20020向外伸出。
31.在同一刷手机构2中,其中一个刷杆20的外筒2002直接连接伺服电机40的输出转
轴,同一刷手机构2中的所有刷杆20同时连接传动带41,刷杆20的外筒2002上端部设有外齿轮杆202,传动带41内壁设有内锯齿面,外齿轮杆202与传动带41的锯齿面相啮合,仅驱动刷手机构2中一个刷杆20便可以带动该刷手机构2中所有刷杆20同步运动。
32.内筒2001连接有往复导向结构,往复导向结构用于在外筒2002旋转的同时使内筒2001作轴向往复运动,往复导向结构包括导向柱203和导向槽204,导向柱203表面环绕设置有波浪形槽2030,导向柱203与内筒2001同轴心固定连接,导向槽204内壁设有导向凸块2040,导向槽204固定设于机身主体1内部,导向柱203嵌入导向槽204中且可沿导向槽204轴向滑动,同时导向凸块2040嵌入波浪形槽2030中。由于内筒2001在外筒2002中仅可轴向滑动,在外筒2002旋转时,内筒2001产生跟随外筒2002一起旋转的趋势,此时导向凸块2040受波浪形槽2030的侧板的挤压力,导向凸块2040沿波浪形槽2030相对运动,即内筒2001发生轴向往复运动,内筒2001所连接的刷毛201作纵向刷洗动作。
33.左手伸入口130和右手伸入口131均为适应手掌横截面形状的圆角矩形开口,左手伸入口130和右手伸入口131的两个长边侧分别设有三个刷杆20,左手伸入口130和右手伸入口131的两个短边侧分别设有两个刷杆20,相邻刷杆20上的刷毛201在刷杆20的轴向方向上相互错开设置。
34.冲液系统3包括多个水喷头30、洗手液喷头31、消毒液喷头32以及用于控制上述三种喷头的泵系统,水喷头30、洗手液喷头31和消毒液喷头32分布于左手冲洗腔14和右手冲洗腔15内壁,消毒液采用洁肤柔松宁消毒液,泵系统包括有用于控制喷水的增压自吸泵a34、用于控制洗手液喷出的增压自吸泵b35以及用于控制消毒液喷出的增压自吸泵c36,增压自吸泵a34设于水喷头30所连接的内部管路33上,增压自吸泵b35设于洗手液喷头31所连接的内部管路33上,增压自吸泵c36设于消毒液喷头32所连接的内部管路33上。
35.驱动机构4、增压自吸泵a34、增压自吸泵b35以及增压自吸泵c36均设于控制壳体11中,控制壳体11上表面设有进水接口300、洗手液接口310和消毒液接口320,水喷头30通过独立的内部管路33连接至进水接口300,进水接口300可连接用于输送清洗用水的管道,洗手液喷头31通过独立的内部管路33连接至洗手液接口310,洗手液接口310可连接外部的洗手液容器,消毒液喷头32通过独立的内部管路33连接至消毒液接口320,消毒液接口320可连接外部的消毒液容器。
36.左手冲洗腔14和右手冲洗腔15中的刷手机构2自动形成刷洗动作,配合喷出的水、清洗剂和消毒液,使用者无需自己进行搓洗动作,也无需自行取用清洗剂和消毒液,便可以完成整个外科洗手工作;泵系统可以控制上述水、洗手液、洁肤柔松宁消毒液的喷出顺序、喷出时长以及喷出量,以模拟正确的外科洗手过程。
37.以上所述是本发明的优选实施方式,对于本领域的普通技术人员来说不脱离本发明原理的前提下,还可以做出若干变型和改进,这些也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1