一种具有智能语音识别功能的手自动两用开合窗帘机系统的制作方法
1.本发明属于智能家居技术领域,具体涉及一种具有智能语音识别功能的手自动两用开合窗帘机。
背景技术:
2.随着智能家居技术的发展,自动窗帘机逐渐进入了人们的生活。但是现有的自动窗帘机是存在一定的缺陷的,主要有下面几个方面:其一,无论是出于习惯或方便,窗帘都是经常被人为拉动的,现有的自动窗帘机由于本身控制系统的局限性,手动操控窗帘后会影响下次自动控制的精度,降低了体验感。其二,现有的基于语音控制的自动窗帘机,必须通过外部数据的支撑,才能实现语音控制,限制了使用的范围。其三,现有的自动窗帘机一般使用交流电源,对于自动窗帘机这样内部空间较小的装置,使用交流电源会带来一定的安全隐患。
技术实现要素:
3.针对以上不足,本发明所要解决的技术问题是提供一种具有智能语音识别功能的手自动两用开合窗帘机,以解决现有的窗帘机开合精度差、手自动控制不协调、需外部数据支撑语音识别等问题。
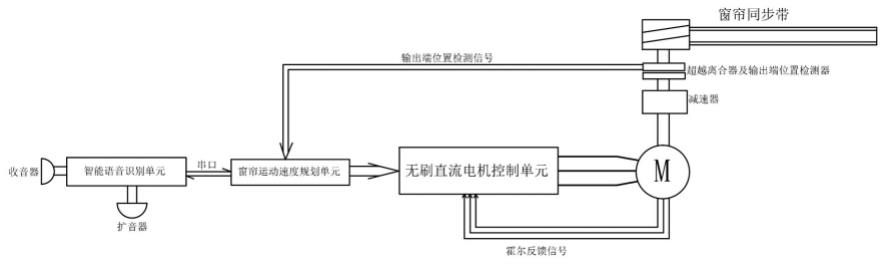
4.为解决以上技术问题,本发明采用的技术方案是,一种具有智能语音识别功能的手自动两用开合窗帘机系统,包括智能语音识别单元、窗帘运动速度规划单元、无刷直流电机控制单元、无刷直流电机、减速器、超越离合器、输出端位置检测器和同步带,智能语音识别单元通过串行接口与窗帘运动速度规划单元连接,窗帘运动速度规划单元通过串行接口与无刷直流电机控制单元连接,无刷直流电机控制单元控制无刷直流电机,减速器与无刷直流电机连接,超越离合器安装在减速器上,同步带与超越离合器连接,输出端位置检测器安装在超越离合器上;输出端位置检测器通过并行接口与窗帘运动速度规划单元相连,以将输出端位置反馈至窗帘运动速度规划单元内,所述窗帘运动速度规划单元接收智能语音识别单元的运动控制信号以及输出端位置检测器的位置反馈信号,根据运动控制信号、位置反馈信号生成窗帘运动速度控制命令,速度控制命令发送至无刷直流电机控制单元上,控制无刷直流电机运行;无刷直流电机控制单元具有转速和电流双闭环的结构。
5.进一步的,无刷直流电机控制单元包括速度控制器、电流控制器、换向控制模块、脉宽调制模块、逆变电路模块,所述无刷直流电机上安装有霍尔位置检测器,所述霍尔位置检测器一方面用于控制无刷直流电机工作,另一方面可以配合输出端位置检测器对窗帘的位置信息进行反馈,无刷直流电机定子的三相绕组中的两相与电流传感器相串连。
6.进一步的,窗帘运动速度规划单元根据输出端位置检测器反馈的位置信号进行速度曲线规划,速度曲线规划包括长距离模式速度曲线、中距离模式速度曲线和短距离模式速度曲线。
7.进一步的,超越离合器包括主动副和被动副,主动副单向往被动副传递转矩,被动副无法向主动副传递转矩,以实现手自动两用的工作方式切换,输出端位置检测器安装在被动副上。
8.进一步的,智能语音识别单元上安装有收音器和扬声器,收音器用于接收语音信息并发送给智能语音识别单元,扬声器用于针对接收到的语音命令发出应答,智能语音识别单元只通过本机微处理器完成语音命令进行识别和转换,无需外部数据支撑。
9.进一步的,所述开合窗帘机采用通用的电源适配器供电。
10.进一步的,所述开合窗帘机还包括安装壳体,智能语音识别单元、窗帘运动速度规划单元、无刷直流电机控制单元、无刷直流电机、减速器、超越离合器均安装在安装壳体内,在壳体上成形有轴孔和语音传输通孔。
11.本发明的有益效果是,本发明通过上述的具有智能语音识别功能的手自动两用开合窗帘机系统,有效解决窗帘机开合精度差、手自动控制不协调、需外部数据支撑语音识别以及内置电源不安全的问题。
附图说明
12.图1是具有智能语音识别功能的手自动两用开合窗帘机系统的整体结构图。
13.图2是具有智能语音识别功能的手自动两用开合窗帘机系统的装配示意图。
14.图3是窗帘机运动速度曲线图。
15.图4是带有减速器和超越离合器的无刷直流电机外形示意图。
16.图5 是转速电流双闭环的无刷直流电机控制原理图。
17.附图标记:收音器1,扬声器2,无刷直流电机3,减速器4,超越离合器5,安装壳体6,轴孔7,语音通孔8,主动副9,被动副10。
具体实施方式
18.下面结合附图对本发明进行进一步描述。
19.一种具有智能语音识别功能的手自动两用开合窗帘机系统,包括智能语音识别单元、窗帘运动速度规划单元、无刷直流电机控制单元、无刷直流电机、减速器、超越离合器、输出端位置检测器和同步带,智能语音识别单元上安装有收音器1和扬声器2,收音器1用于接收语音信息并发送给智能语音识别单元,扬声器2用于针对接收到的语音命令发出应答;窗帘运动速度规划单元用于接收智能语音识别单元和输出端位置检测器的信号,根据这些信号生成窗帘运动速度控制命令,并向无刷直流电机控制单元发送控制命令;无刷直流电机控制单元:用于驱动无刷直流电机,并接收来自无刷直流电机的霍尔反馈信号;超越离合器:用于将减速器输出的转矩传递给同步带驱动轮转轴,并阻断同步带驱动轮转轴逆向减速器传递转矩;输出端位置检测器:用于检测超越离合器的被动副的转动位置;同步带:用于将被动副输出的旋转运动转换成窗帘的水平直线运动。
20.智能语音识别单元通过串行接口与窗帘运动速度规划单元连接,窗帘运动速度规划单元通过串行接口与无刷直流电机控制单元连接,无刷直流电机控制单元控制无刷直流电机,减速器4与无刷直流电机3连接,超越离合器安装在减速器3的输出轴上,减速器4用于传递并增大转矩,带动超越离合器主动副转动。同步带与超越离合器连接,输出端位置检测
器安装在超越离合器上,窗帘同步带用于将被动副输出的旋转运动转换成窗帘的水平直线运动,通过输出端位置检测器对同步带的位置进行检测,再通过窗帘运动速度规划单元、无刷直流电机控制单元控制无刷直流电机工作,可以有效提高窗帘机的开合精度,便于对窗帘的运动进行规划,提高窗帘的开合效率,通过超越离合器的设置,可以实现窗帘机的手动和电动开合,以适应实际生活中窗帘的不同使用需求。
21.输出端位置检测器通过并行接口与窗帘运动速度规划单元相连,以将输出端位置反馈至窗帘运动速度规划单元内,所述窗帘运动速度规划单元接收智能语音识别单元的运动控制信号以及输出端位置检测器的位置反馈信号,根据运动控制信号、位置反馈信号生成窗帘运动速度控制命令,控制命令发送至无刷直流电机控制单元上,控制无刷直流电机运行,无刷直流电机控制单元具有转速和电流双闭环的结构,通过输出端位置检测器来检测超越离合器的位置,可以有效提高窗帘机的开合精度。
22.无刷直流电机控制单元包括速度控制器、电流控制器、换向控制模块、脉宽调制模块、逆变电路模块,所述无刷直流电机上安装有霍尔位置检测器,所述霍尔位置检测器一方面用于控制无刷直流电机工作,另一方面可以配合输出端位置检测器对窗帘的位置信息进行反馈,无刷直流电机定子的三相绕组中的两相与电流传感器相串连。
23.如图3所示,窗帘运动速度规划单元根据输出端位置检测器反馈的位置信号进行速度曲线规划,速度曲线规划包括长距离模式速度曲线、中距离模式速度曲线和短距离模式速度曲线,其中,速度曲线包括升速段、恒速段、降速段、低速定位段,升速段指加速过程,恒速段至匀速过程,降速段指匀速段的速度降至低速段速度的过程,低速定位段指速度交底的匀速移动过程。
24.长距离速度曲线包括升速段、恒速段、降速段、低速定位段;中距离速度曲线包括升速段、降速段、低速定位段;短距离速度曲线仅包括低速定位段。
25.速度规划的方式根据位置传感器检测窗帘的对应位置可以划分为长定位间距、中定位件间距和短定位间距,在一些实施例中,长定位间距指窗帘的移动间距大于二分之一的窗帘总行程,中定位间距指窗帘的移动间距在四分之一到二分之一的窗帘总行程的范围内,短定位间距指窗帘的移动间距小于四分之一的窗帘总行程。
26.超越离合器用于将减速器输出的转矩传递给同步带驱动轮转轴,并阻断同步带驱动轮转轴逆向减速器传递转矩,包括主动副9和被动副10,所述超越离合器的主动副9与所述减速器的输出端相连,所述超越离合器的被动副10驱动同步带运行,主动副9与被动副10间歇式连接,所述超越离合器的主动副可向被动副传递转矩,被动副无法向主动副传递转矩,从而使得人为拉动窗帘时,不会受到无刷直流电机和减速器的阻碍,实现窗帘机的手自动两用的功能,输出端位置检测器安装在被动副10上。
27.智能语音识别单元只通过本机微处理器完成语音命令进行识别和转换,无需外部数据支撑,可以有效提高语音识别的处理效率,可以使得语音识别单元在没有网络的环境下工作。
28.所述开合窗帘机采用通用的电源适配器供电,降低电源内置的自燃风险。
29.所述开合窗帘机还包括安装壳体6,智能语音识别单元、窗帘运动速度规划单元、无刷直流电机控制单元、无刷直流电机、减速器、超越离合器均安装在安装壳体6内,在壳体上成形有轴孔7和语音传输通孔8,轴孔7用于超越离合器的连接轴伸出安装壳体6外,便于
与窗帘同步带连接,语音通孔8便于收音器1、扬声器2收发语音信息。
30.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现;因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
31.尽管本文较多地使用了图中附图标记对应的术语,但并不排除使用其它术语的可能性;使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1