餐具清洗控制方法、装置及相关产品与流程
本技术涉及餐具清洗机,特别是涉及一种餐具清洗控制方法、装置及相关产品。
背景技术:
1、餐具清洗机作为一种对餐具进行自动清洗的智能家电,广受青睐。在许多大型食堂、酒店、公共设施均会提供用餐服务,单日用餐人数过多,使用的餐具数量更是用餐人数的数倍,从而会给工作人员造成很大的餐具清洗工作量。
2、相关技术中,餐具在使用过后,由工作人员搬运至餐具清洗机,再由餐具清洗机进行自动清洗餐具。但是,采用相关技术过于依赖人工,从而导致餐具清洗效率较低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种餐具清洗控制方法、装置及相关产品。
2、第一方面,本技术提供了一种餐具清洗控制方法,该方法应用于餐具清洗机,餐具清洗机包括清洗平台、输入接驳平台以及输出接驳平台;
3、上述方法包括:
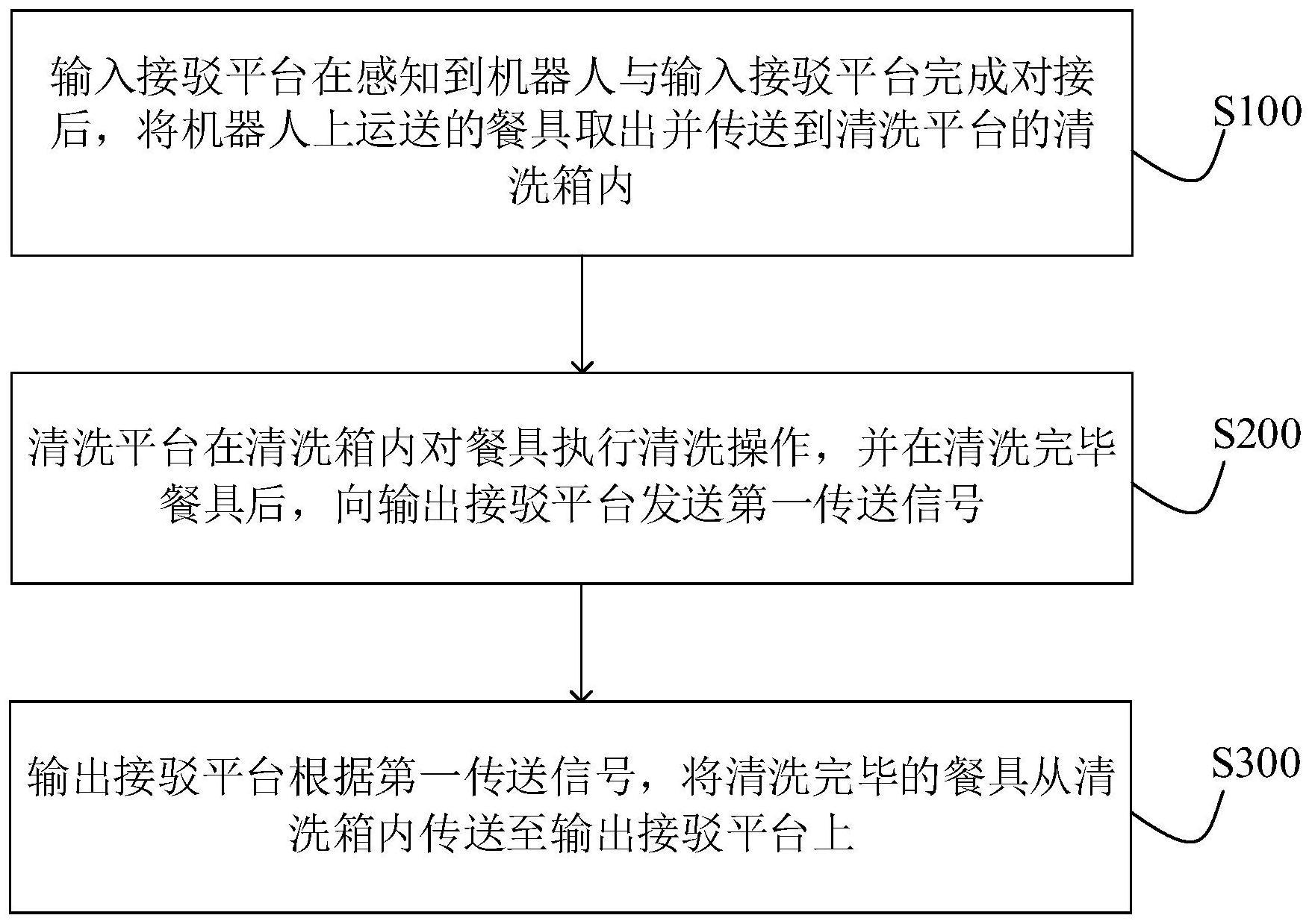
4、输入接驳平台在感知到机器人与输入接驳平台完成对接后,将机器人上的餐具取出并传送到清洗平台的清洗箱内;
5、清洗平台在清洗箱内对餐具执行清洗操作,并在清洗完毕餐具后,向输出接驳平台发送第一传送信号;
6、输出接驳平台根据第一传送信号,将清洗完毕的餐具从清洗箱内传送至输出接驳平台上。
7、在其中一个实施例中,输入接驳平台包括输入控制器、接触传感器、对接口和输入轨道;
8、输入接驳平台在感知到机器人与输入接驳平台完成对接后,将机器人上的餐具取出并传送到清洗平台的清洗箱内,包括:
9、输入控制器获取接触传感器采集的对接状态检测信号,对接状态检测信号表示机器人与对接口的对接状态;
10、若对接状态检测信号表示的对接状态为机器人已与对接口完成对接,则输入控制器生成第二传送信号,第二传送信号用于指示将餐具移动到输入轨道上;
11、输入控制器将餐具通过输入轨道传送到清洗平台的清洗箱内。
12、在其中一个实施例中,输入接驳平台还包括分别与输入控制器通信连接的第一位置传感器和推送电机,推送电机与输入轨道连接;
13、输入控制器将餐具通过输入轨道传送到清洗平台的清洗箱内,包括:
14、输入控制器获取第一位置传感器采集的第一位置检测信号,第一位置检测信号表示餐具在输入轨道上的位置;
15、若第一位置检测信号表示的位置为餐具处于输入轨道与清洗平台之间的接口位置,且清洗箱门处于开启状态,则输入控制器通过驱动推送电机,将餐具从输入轨道上传送到清洗箱内。
16、在其中一个实施例中,清洗平台包括清洗控制器;清洗平台在清洗箱内对餐具执行清洗操作,包括:
17、清洗控制器在检测到餐具处于清洗箱内的目标位置时,控制清洗箱门关闭,并对餐具执行清洗操作。
18、在其中一个实施例中,清洗平台还包括分别与清洗控制器通信连接的箱门驱动电机、清洗驱动电机、第二位置传感器和状态传感器;
19、清洗控制器在检测到餐具处于清洗箱内的目标位置时,控制清洗箱门关闭,并对餐具执行清洗操作,包括:
20、清洗控制器获取第二位置传感器采集的第二位置检测信号,以及状态传感器采集的开闭状态检测信号;第二位置检测信号表示餐具在清洗箱内的位置;开闭状态检测信号表示清洗箱门的开闭状态;
21、若第二位置检测信号表示的位置为餐具处于清洗箱内的目标位置,且开闭状态检测信号表示的清洗箱门为打开状态时,清洗控制器通过驱动箱门驱动电机控制清洗箱门关闭,并通过驱动清洗驱动电机启动以对餐具执行清洗操作。
22、在其中一个实施例中,清洗驱动电机包括主洗电机和漂洗电机,清洗箱包括主洗水箱和漂洗水箱,清洗操作包括主洗操作和漂洗操作;
23、通过驱动清洗驱动电机启动以对餐具执行清洗操作,包括:
24、清洗控制器通过控制清洗平台的电磁阀打开向漂洗水箱注入清洗水,并检测漂洗水箱内的清洗水是否满足预设条件;
25、若满足预设条件,清洗控制器通过控制主洗水箱与漂洗水箱之间的水阀打开,将漂洗水箱中的清洗水注入主洗水箱内;
26、若主洗水箱内的水量达到第一预设水位量,通过驱动主洗电机启动以执行主洗操作,并在餐具主洗操作完毕后,通过控制漂洗电机启动以执行漂洗操作。
27、在其中一个实施例中,清洗平台还包括电磁阀、加热器、温度传感器、设置于漂洗水箱的第一水位传感器;
28、检测漂洗水箱内的清洗水是否满足预设条件包括:
29、清洗控制器获取第一水位传感器采集的第一水位量,在第一水位量达到第二预设水位量时,控制电磁阀关闭,并通过控制加热器启动对漂洗水箱内的清洗水进行加热;
30、清洗控制器获取温度传感器采集的水温,在水温达到预设的温度阈值时,控制加热器关闭,并确定漂洗水箱内的清洗水满足预设条件。
31、在其中一个实施例中,清洗平台还包括水阀;清洗平台还包括设置于主洗水箱的第二水位传感器;
32、上述方法还包括:
33、清洗控制器获取第二水位传感器采集的第二水位量,在第二水位量达到第一预设水位量时,控制水阀关闭。
34、在其中一个实施例中,清洗驱动电机还包括:清洁剂注入电机;清洗平台还包括剂量传感器和设置于主洗水箱内的清洁水饱和度传感器;
35、通过驱动主洗电机启动以执行主洗操作,包括:
36、清洗控制器通过驱动清洁剂注入电机向主洗水箱的清洁水中注入清洁剂;
37、清洗控制器获取剂量传感器检测的清洁水中注入清洁剂的剂量,和清洁水饱和度传感器检测的清洁剂与清洁水混合后的清洁水饱和度;
38、若剂量达到预设剂量且清洁水饱和度达到预设饱和度时,清洗控制器驱动主洗电机启动以执行主洗操作。
39、在其中一个实施例中,清洗平台还包括排水电机和除渣电机;上述方法还包括:
40、在漂洗操作结束时,清洗控制器通过控制排水电机启动排出主洗水箱内的清洗水,并在主洗水箱内的清洗水排出完毕后,通过控制除渣电机启动排出主洗水箱内的残渣物。
41、在其中一个实施例中,输出接驳平台包括输出控制器、拉取电机、输出轨道;
42、输出接驳平台根据第一传送信号,将清洗完毕的餐具传送至输出接驳平台上,包括:
43、输出控制器根据第一传送信号,控制拉取电机启动,通过驱动拉取电机将清洗完毕的餐具从清洗箱内传送到输出轨道上。
44、在其中一个实施例中,机器人为根据预设导航地图中的导航路径,行驶到输入接驳平台的对接口处;
45、其中,预设导航地图中的导航路径为根据待清洗的餐具的初始位置、输入接驳平台的对接口位置、餐具清洗机和机器人所处环境的环境信息确定的。
46、第二方面,本技术提供了一种餐具清洗控制装置。该餐具清洗控制装置应用于餐具清洗机,餐具清洗机包括清洗平台、输入接驳平台和输出接驳平台;
47、上述餐具清洗控制装置包括:
48、第一传送模块,用于在感知到机器人与输入接驳平台完成对接后,将机器人上的餐具取出并传送到清洗平台的清洗箱内;
49、清洗操作控制模块,用于在清洗箱内对餐具执行清洗操作,并在清洗完毕餐具后,向输出接驳平台发送第一传送信号;
50、第二传送模块,用于根据第一传送信号,将清洗完毕的餐具从清洗箱内传送至输出接驳平台上。
51、第三方面,本技术提供了一种餐具清洗机。该餐具清洗机,包括存储器、处理器,存储器存储有计算机程序,其特征在于,处理器执行计算机程序时实现上述第一方面的任一实施例中方法的步骤。
52、第四方面,本技术提供了一种可读存储介质。该可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述第一方面的任一实施例中方法的步骤。
53、第五方面,本技术提供了一种计算机程序产品。该计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面的任一实施例中方法的步骤。
54、上述餐具清洗控制方法、装置及相关产品,餐具清洗控制方法应用于餐具清洗机,餐具清洗机包括清洗平台、输入接驳平台以及输出接驳平台,输入接驳平台在感知到机器人与输入接驳平台完成对接后,将机器人上运送的餐具取出并传送到清洗平台的清洗箱内,在清洗箱内对餐具执行清洗操作,并在清洗完毕餐具后,向输出接驳平台发送第一传送信号,输出接驳平台根据第一传送信号,将清洗完毕的餐具从清洗箱内传送至输出接驳平台上;上述餐具清洗控制方法可以避免人工参与清洗流程,通过机器人就可以替代人工将餐具搬运至餐具清洗机所处位置,在通过餐具清洗机对机器人搬运的餐具执行自动清洗操作,从而能够减少工作人员搬运餐具的劳动负担,使得整个餐具清洗操作智能化,还能够节省餐具清洗时间,提高餐具清洗效率。
- 还没有人留言评论。精彩留言会获得点赞!