一种自动炒菜机器人及其控制方法与流程
1.本发明涉及炒菜机器技术领域,特别涉及一种自动炒菜机器人及其控制方法。
背景技术:
2.自动炒菜机是一款现代科技产品,可以实现炒菜过程的自动化,且具有无油烟、无辐射、省油省电、自动翻炒等优点。操作方便、简单,让人远离厨房油烟危害,可适用于家庭、学校食堂、企业食堂、部队食堂及熟食品加工行业。
3.中国专利公开号cn110141109a,公开了名为自动炒菜机器人,包括机架,在机架上部一侧设有炒锅翻转机构带动翻转的炒锅,炒锅上的锅盖由锅盖翻转机构带动翻转,锅盖内设炒菜搅拌机构;在机架上部另一侧设配菜盛菜盘移动、翻转机构。本发明结构紧促,自动化程度高,易于操作,炒菜实现了不间断化操作,效率高,是目前家庭、餐馆等较理想的自动炒菜机器人。
4.该装置在炒菜完毕后翻转炒锅将菜品倒入下方的盛菜盘,由此结合附图可知该装置炒锅的底部为中空设计,进而无法实现炒锅快速均匀升温,使得炒锅加热需要时间,无法满足高温快速爆炒需求,存在一定的使用局限性。
5.因此,有必要提供一种自动炒菜机器人及其控制方法解决上述技术问题。
技术实现要素:
6.本发明的目的在于提供一种自动炒菜机器人及其控制方法,以解决上述背景技术中无法实现炒锅快速均匀升温,使得炒锅加热需要时间,无法满足高温快速爆炒需求等问题。
7.为实现上述目的,设计一种自动炒菜机器人,具备快速均匀升温,满足高温快速爆炒需求。
8.基于上述思路,本发明提供如下技术方案:一种自动炒菜机器人,包括机身,所述机身的表面固定安装有电磁炉,电磁炉上活动设置有锅体,机身的表面贯穿设置有用于放置食材的送菜机构、将送菜机构的食材转运给锅体的倒菜机构以及与锅体位置对应的翻盖机构,翻盖机构包括悬臂、与悬臂可拆卸连接的锅盖以及与悬臂固定连接且延伸至锅盖内的油水出口,悬臂与锅盖共同固定连接有炒菜机构,炒菜机构包括主锥齿轮、与主锥齿轮传动连接的从锥齿轮与从锥齿轮同轴传动的翻炒头,机身的内部固定安装有与油水出口接通的泵体,机身的表面固定安装有与泵体进口接通的油水进口。
9.作为本发明的进一步方案:所述电磁炉的内部固定安装有电路板、将电路板罩住的罩壳以及用于加热锅体的电磁线盘,电磁炉的底部且位于电磁线盘的下方固定安装有第一风扇,罩壳的表面固定嵌合有第二风扇,电磁炉的底部且对应第一风扇和两个第二风扇的位置呈镂空设计。
10.作为本发明的进一步方案:所述翻盖机构包括与机身内侧壁固定连接的第三电机,电机的输出轴和悬臂的外表面均固定安装有传动齿轮且两个传动齿轮传动连接,悬臂
贯穿机身并与其转动连接。
11.作为本发明的进一步方案:所述悬臂呈空心设计且其沿着机身转动的圆轨迹与锅体的中心重合。
12.作为本发明的进一步方案:所述炒菜机构包括与悬臂固定连接的第四电机,第四电机的输出轴延伸至锅盖的内部并固定安装有固定座,主锥齿轮活动套设在固定座上且与锅盖活动卡合,固定座的表面贯穿并转动安装有两个传动轴,从锥齿轮和翻炒头分别固定安装在传动轴的两端。
13.作为本发明的进一步方案:所述泵体、油水进口和油水出口依次分为油泵和水泵、油进口和水进口以及油出口和水出口。
14.作为本发明的进一步方案:所述送菜机构包括与机身固定连接的第一电机,第一电机的输出轴固定安装有支杆,支杆的外表面活动套设有料盘,料盘的表面放置有用于收纳食材的若干个收纳组件,每个收纳组件上均固定安装有与倒菜机构位置对应的金属块。
15.作为本发明的进一步方案:所述收纳组件为底部镂空设计的收纳盒,金属块设置在收纳盒远离支杆的表面。
16.作为本发明的进一步方案:所述倒菜机构包括与机身固定连接的第二电机和支架,第二电机的输出轴固定安装有丝杆,丝杆的外表面螺纹连接有滑块,滑块的内部活动套设有与支架固定连接的光轴,支架的表面开设有弧形槽,弧形槽的内部滑动安装有与滑块转动连接的支杆,支架的内部固定安装有主轴,主轴的外表面活动套设有与连杆转动连接的中间块,中间块靠近送菜机构的表面固定安装有与金属块位置对应的电磁铁。
17.作为本发明的进一步方案:所述收纳组件包括壳体,壳体的底部可拆卸连接有收集筒,壳体的内部活动安装有隔环,隔板和壳体的底壁均贯穿开设有若干个沥水孔,壳体的外表面固定安装有与电磁铁位置对应的金属块,金属块和壳体共同滑动安装有凸块,凸块相对凸出金属块且靠近壳体的端部固定安装有弹簧,凸块与隔环之间转动连接有短杆。
18.本发明还提供如下技术方案:一种自动炒菜机器人的控制方法,包括以下步骤,
19.s1:启动电磁炉开始加热并启动泵体自动加油;
20.s2:启动翻盖机构将锅盖与锅体分离,然后启动倒菜机构将送菜机构内的一部分食材倒入锅体,再通过翻盖机构将锅盖与锅体闭合,并启动炒菜机构转动翻炒;
21.s3:启动翻盖机构将锅盖与锅体分离,然后启动送菜机构将剩余食材调至与倒菜机构对应,再启动倒菜机构将送菜机构内的剩余食材倒入锅体内,接着通过翻盖机构将锅盖与锅体闭合,并启动炒菜机构转动翻炒完成炒菜;
22.s4:启动翻盖机构将锅盖与锅体分离并将菜品取出,然后通过翻盖机构将锅盖与锅体闭合并启动泵体自动加水,最后启动炒菜机构持续搅动以实现对锅体和炒菜机构的清洗。
23.与现有技术相比,本发明的有益效果是:通过送菜机构、倒菜机构、翻盖机构和电磁炉等之间的配合,可以实现升温更高受热更快更均匀,大大节省菜品的完成时间,且更加适用于小炒类菜品的高温快速爆炒,满足实际炒菜的口感需求。整体结构在布置时采用主控部分侧置的方式,在避免电磁干扰的同时,更加方便后期清洁和养护,且占用空间更小,在有限的空间里,电磁炉的设计可以进一步避免互相干扰和电磁影响,进而保证温度稳定。在炒菜过程中可以实现自动加油和加水,更加卫生高效,炒菜完毕后可以实现锅体和炒菜
机构的有效清洁,进一步减轻使用者的劳动负担。设置的倒菜机构在送料入锅体时,具有非匀速可完全送料的好处,下料更干净利用率更高,实用性更高。
附图说明
24.下面结合附图和实施例对本发明进一步说明:
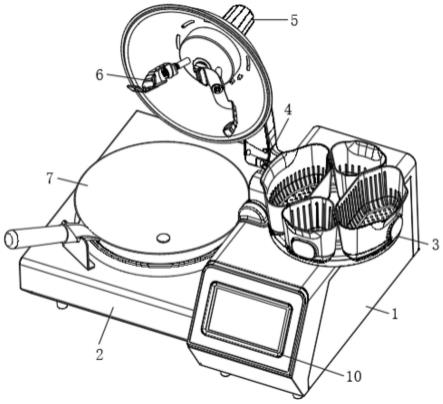
25.图1为本发明的整体结构立体图;
26.图2为本发明的整体结构仰视图;
27.图3为本发明的炒菜机构结构示意图;
28.图4为本发明的炒菜机构爆炸图;
29.图5为本发明的倒菜机构结构示意图;
30.图6为本发明的倒菜机构爆炸图;
31.图7为本发明的支架和弧形槽结构示意图;
32.图8为本发明的送菜机构爆炸图;
33.图9为本发明的翻盖机构结构示意图;
34.图10为本发明的第一风扇和第二风扇结构示意图;
35.图11为本发明的壳体和收集筒结构示意图;
36.图12为本发明的隔环结构示意图。
37.图中:1、机身;2、电磁炉;3、送菜机构;4、倒菜机构;5、翻盖机构;6、炒菜机构;7、锅体;8、第一风扇;9、罩壳;10、控制面板;11、油水进口;12、测温装置;13、第二风扇;301、第一电机;302、支杆;303、料盘;304、收纳组件;3041、壳体;3042、收集筒;3043、凸块;3044、隔环;3045、短杆;401、第二电机;402、支架;403、丝杆;404、滑块;405、光轴;406、主轴;407、中间块;408、电磁铁;409、连杆;410、弧形槽;501、第三电机;502、传动齿轮;503、锅盖;504、悬臂;601、第四电机;602、固定座;603、主锥齿轮;604、传动轴;605、从锥齿轮;606、翻炒头。
具体实施方式
38.实施例一:
39.请参阅图1、图2和图10,本发明实施例提供一种自动炒菜机器人,面向市场主要定位为小炒类菜品,其包括机身1,机身1的左侧壁固定安装有电磁炉2,电磁炉2上活动设置有锅体7,电磁炉2对锅体7进行加热进行炒菜,锅体7在电磁炉2上可放置可取下。机身1的表面贯穿设置有用于放置食材的送菜机构3、将送菜机构3的食材转运给锅体7的倒菜机构4以及与锅体7位置对应的翻盖机构5,翻盖机构5包括悬臂504、与悬臂504可拆卸连接的锅盖503以及与悬臂504固定连接且延伸至锅盖503内的油水出口,本实施例中锅盖503与悬臂504之间采用磁吸式连接,拆装更加方便,且初始状态时锅盖503与锅体7呈闭合状态;悬臂504与锅盖503共同固定连接有炒菜机构6,炒菜机构6包括主锥齿轮603、与主锥齿轮603传动连接的从锥齿轮605与从锥齿轮605同轴传动的翻炒头606。
40.机身1的内部固定安装有泵体(图中未示出),机身1的后表面固定安装有与泵体进口相接通的油水进口11,泵体的出口通过软管与油水出口接通;本实施中泵体分为油泵和水泵,油水进口11分为油进口和水进口,油进口和水进口分别通过管道与外部储油设备和储水设备接通,油水出口分为油出口和水出口。机身1的前表面固定嵌合有控制面板10,控
制面板10与泵体、电磁炉2、送菜机构3、倒菜机构4、翻盖机构5和炒菜机构6均电连接,其中储油设备、储水设备和控制面板10均为现有的成熟技术,在这里不做详细说明。
41.在本实施例中,优选的:使用时首先将相应食材按炒菜的步骤放入送菜机构3内,再通过控制面板10启动电磁炉2对锅体7进行加热并启动泵体自动加油;然后通过控制面板10启动翻盖机构5将锅盖503与锅体7分离,接着启动倒菜机构4将送菜机构3内的一部分食材倒入锅体7;再然后通过控制面板10启动翻盖机构5将锅盖503与锅体7闭合,并启动炒菜机构6转动对食材进行翻炒,此时电磁炉2保持加热状态;
42.翻炒过程中,通过锅盖503可以看到炒菜机构6的转动以及炒菜过程;在此过程中关闭炒菜机构6并通过控制面板10启动翻盖机构5将锅盖503与锅体7分离,然后启动倒菜机构4将送菜机构3内的剩余食材倒入锅体7内,此时可手动加入适量调味料,也可以将调味料放入送菜机构3中自动送入;接着通过控制面板10启动翻盖机构5将锅盖503与锅体7闭合,并启动送菜机构3将剩余食材调至与倒菜机构4对应,再启动炒菜机构6转动继续翻炒完成炒菜,在此过程中若需要加水则控制面板10还会启动泵体自动加水。
43.炒完菜后通过控制面板10启动翻盖机构5将锅盖503与锅体7分离,然后将菜品取出,接着控制面板10启动翻盖机构5将锅盖503与锅体7闭合并启动泵体自动加水,最后启动炒菜机构6持续转动搅动,实现对锅体7和炒菜机构6的有效清洗,此时电磁炉2处于关闭状态。
44.通过送菜机构3、倒菜机构4、翻盖机构5和炒菜机构6等结构的配合,可以实现炒菜一系列过程的自动化,同时因为可以升温更高受热更快更均匀,大大节省了菜品的完成时间,且更加适用于小炒类菜品的高温快速爆炒,满足实际炒菜的口感需求。在炒菜过程中可以实现自动加油和加水,更加卫生高效,炒菜完毕后可以实现锅体7和炒菜机构6的有效清洁,进一步减轻使用者的劳动负担。整体结构在布置时采用主控部分侧置的方式,在避免电磁干扰的同时,更加方便后期清洁和养护,且占用空间更小,使用场景和条件更广;在有限的空间里,电磁炉2的内部设计可以进一步避免互相干扰和电磁影响,进而保证温度稳定。设置的倒菜机构4在送料入锅体7时,具有非匀速可完全送料的好处,整体的实用性更高。
45.实施例二:
46.请参阅图1至图10,在实施例一的基础上,电磁炉2的上表面呈弧形凹陷设置,用于放置锅体7,电磁炉2的内部固定安装有与控制面板10电连接的电路板、将电路板完全罩住的罩壳9以及用于加热锅体7的电磁线盘,本实施例中锅体7采用圆底铁锅,电磁线盘呈环形设计,配合电磁炉2凹陷形成的环形加热模式,可达到极限功率3500瓦;电磁炉2的底壁且位于电磁线盘的正下方固定安装有两个第一风扇8,罩壳9的上表面固定嵌合有第二风扇13,电磁炉2的底部且对应第一风扇8和两个第二风扇13的位置采用镂空设计,电磁线盘的中心还固定嵌合有测温装置12,对炒菜的过程中温度进行监控。第一风扇8和第二风扇13配合底部镂空设计形成底吸式,从底下抽入冷风,热风从后部吹出往上,而第一风扇8配合罩壳9,形成对电路板的独立风道设计,在有限的空间里,采用电路板和电磁线盘散热分离设计,避免互相干扰,以及电磁影响,保证的主控板的温度控制达到较高的稳定性。
47.送菜机构3包括与机身1内顶壁固定连接且与控制面板10电连接的第一电机301,第一电机301的输出轴固定安装有支杆302,支杆302为异型杆且为非圆形,支杆302的外表面活动套设有料盘303,异型设计的支杆302可以带动料盘303转动,料盘303的上表面开设
有凹槽,凹槽的内部放置有用于收纳食材的若干个收纳组件304,每个收纳组件304上均固定安装有与倒菜机构4位置对应的金属块,本实施例中收纳组件304为底部镂空设计的收纳盒,金属块设置在收纳盒远离支杆302的表面。整体采用旋转型结构,方便产品后期升级增加或者根据菜品实时调整收纳盒个数以及修改收纳盒大小的目的,收纳盒既可以盛放食材也可以盛放调味料,有效节省空间达到更高利用率,并且该设计达到了分离以及隔离食材的目的,区别于传统工艺中带有内外传动造成的出现油或者水流入设备内部的问题。
48.倒菜机构4包括与机身1内侧壁固定连接且与控制面板10电连接的第二电机401以及固定嵌合在机身1上的支架402,第二电机401的输出轴固定安装有丝杆403,丝杆403的外表面螺纹连接有滑块404,滑块404的内部活动套设有与支架402固定连接的光轴405,通过光轴405可实现滑块404限位进而带动滑块404相对支架402移动;支架402的表面开设有弧形槽410,弧形槽410的内部滑动安装有与滑块404转动连接的支杆302,本实施例中弧形槽410、支杆302和光轴405均设置有两个,其稳定性更佳;支架402的内部固定安装有主轴406,主轴406的外表面活动套设有与连杆409转动连接的中间块407,中间块407靠近收纳盒的表面固定安装有与金属块位置对应的电磁铁408。倒菜机构4使用丝杆403传动结构,以达到在运动过程中非匀速的效果。
49.翻盖机构5包括与机身1内侧壁固定连接且与控制面板10电连接的第三电机501,电机的输出轴和悬臂504的外表面均固定安装有传动齿轮502且两个传动齿轮502传动连接,悬臂504呈空心设计且贯穿机身1并与其转动连接,悬臂504沿着机身1转动的圆轨迹与锅体7的中心刚好重合,使得锅盖503可以将锅体7盖住。悬臂504的悬空式侧边固定设计以及空心设计,方便客户使用过程中清理以及安装过程中的电线和管道布置,并保证了稳定性。
50.炒菜机构6包括与悬臂504固定连接且与控制面板10电连接的第四电机601,第四电机601设置在锅盖503和悬臂504之间,第四电机601的输出轴延伸至锅盖503的内部并固定安装有固定座602,固定座602的内部向第四电机601方向凸出形成有圆台,主锥齿轮603活动套设在固定座602的圆台外表面,同时主锥齿轮603的上表面设置有卡槽(图4示出),锅盖503的内部设置有卡块(图9示出),当固定座602装配后主锥齿轮603的卡槽与锅盖503的卡块刚好卡合形成限位,此时主锥齿轮603无法转动;固定座602的表面贯穿并转动安装有两个传动轴604,传动轴604呈倾斜设计且两个传动轴604以主锥齿轮603为对称轴呈对称设置,从锥齿轮605和翻炒头606分别固定安装在传动轴604的顶端和底端;翻炒头606呈u形设计,且每个端部的多个面均设置有倒角,更加贴合锅底,可以达到在旋转的同时完全贴合锅体7,避免出现局部粘锅的问题。
51.在本实施例中,优选的:使用时首先将相应食材按炒菜的步骤依次放入收纳盒内,再通过控制面板10和电路板启动电磁线盘对锅体7进行加热,然后启动油泵自动加油;接着通过控制面板10启动第三电机501,第三电机501通过传动齿轮502传动带动悬臂504转动,悬臂504带动锅盖503与锅体7分离,再启动第二电机401和电磁铁408,电磁铁408与收纳盒上的金属块吸附,第二电机401通过丝杆403和光轴405等结构带动滑块404和连杆409竖直上升,连杆409上升时在弧形槽410的导向下可以带动中间块407向锅体7转动,中间块407带动电磁铁408、金属块和收纳盒同步转动,将一个收纳盒内的食材倒入锅体7内;再然后通过控制面板10启动第三电机501通过传动齿轮502和悬臂504将锅盖503与锅体7闭合,并启动
第四电机601带动固定座602转动,固定座602带动传动轴604和从锥齿轮605转动,因为主锥齿轮603不动且与从锥齿轮605传动,所以从锥齿轮605在随着固定座602转动时还会自转动,从锥齿轮605通过传动轴604带动翻炒头606同步运动,对食材进行翻炒且此时电磁炉2对锅体7保持加热状态。
52.翻炒过程中,控制面板10关闭第四电机601停止翻炒头606的翻炒运动,并启动第三电机501通过传动齿轮502和悬臂504将锅盖503与锅体7分离,然后启动第一电机301带动支杆302转动,支杆302带动料盘303和上方的收纳盒转动,此时空的收纳盒错开,而盛料的收纳盒转动至与中间块407位置对应,再启动第二电机401通过丝杆403、光轴405、滑块404和连杆409等结构的配合,带动中间块407、电磁铁408、金属块和盛料的收纳盒向锅体7转动,将收纳盒内的食材再倒入锅体7内;因为设置有四个收纳盒,而第一个收纳盒已经在上步工序送料完毕,所以该过程总共需要重复进行三次,当然也可以根据实际菜品需求调节次数。
53.剩余食材全部倒入锅体7后,通过控制面板10启动第三电机501通过传动齿轮502和悬臂504将锅盖503与锅体7闭合,并启动第四电机601通过固定座602、传动轴604、从锥齿轮605和主锥齿轮603等结构的配合,带动翻炒头606沿着主锥齿轮603转动并沿着传动轴604自转动,对锅体7内的食材持续翻炒最终完成炒菜,在此过程中若需要加水则控制面板10还会启动水泵自动加水。
54.炒完菜后通过控制面板10、第三电机501、传动齿轮502和悬臂504带动锅盖503与锅体7分离,然后将菜品取出,接着通过控制面板10、第三电机501、传动齿轮502和悬臂504带动锅盖503与锅体7闭合并启动水泵自动加水,最后通过第四电机601、固定座602、传动轴604、从锥齿轮605和主锥齿轮603等结构的配合,带动翻炒头606沿着主锥齿轮603转动并沿着传动轴604自转动,进行持续转动搅拌,实现对锅体7和翻炒头606的有效清洗,此时电磁炉2处于关闭状态。
55.通过悬臂504、收纳盒、连杆409和从锥齿轮605等结构的配合,可以实现炒菜一系列过程的自动化,同时因为采用环形加热模式并搭配圆形锅底,可以升温更高受热更快更均匀,大大节省了菜品的完成时间,且更加适用于小炒类菜品的高温快速爆炒,满足实际炒菜的口感需求。在炒菜过程中配合伸入锅盖503的油水进口11,可以实现自动加油和加水且更加卫生高效,炒菜完毕后可以实现锅体7和翻炒的有效清洁,进一步减轻使用者的劳动负担。整体结构在布置时采用主控部分侧置的方式,在避免电磁干扰的同时,更加方便后期清洁和养护,且占用空间更小,在有限的空间里,采用电路板和电磁线盘散热分离设计,进一步避免互相干扰和电磁影响,保证电路板的温度控制达到较高稳定性。设置弧形槽410对连杆409进行导向,在送料入锅体7时,有一个瞬时变速过程,具有非匀速可完全送料的好处,下料更干净利用率更高,满足了实际使用中的更多需求。
56.实施例三:
57.请参阅图1至图12,在实施例二的基础上,收纳组件304包括壳体3041,壳体3041的底部可拆卸连接有收集筒3042,本实施例中收集筒3042与壳体3041呈螺纹连接,拆装方便;壳体3041的内部活动安装有隔环3044,隔环3044为杯状体,隔板和壳体3041的底壁均贯穿开设有若干个沥水孔,此时隔环3044和壳体3041的沥水孔对应;壳体3041的外表面固定安装有与电磁铁408位置对应的金属块,金属块和壳体3041共同滑动安装有凸块3043,凸块
3043相对凸出金属块且靠近壳体3041的端部固定安装有弹簧(图中未示出),弹簧用于凸块3043移动后的复位;凸块3043安装弹簧的表面转动安装有短杆3045,短杆3045的远离凸块3043的端部与隔环3044转动连接。
58.在本实施例中,优选的:当食材放入壳体3041内后,食材上的水分从沥水孔经隔环3044和壳体3041流入收集筒3042的内部。在启动电磁铁408时,电磁铁408与壳体3041上的金属块吸附,并将凸块3043挤入壳体3041的内部,凸块3043在移动时挤压弹簧并推动短杆3045水平移动,短杆3045则带动隔环3044沿着壳体3041的内壁转动,使得隔环3044上的沥水孔与壳体3041的沥水孔错位,进而隔环3044可对壳体3041上的沥水孔实现封闭;在启动第二电机401通过丝杆403、光轴405、滑块404和连杆409等结构的配合,带动中间块407、电磁铁408、金属块和壳体3041向锅体7转动,将壳体3041内的食材倒入锅体7内。
59.倒料完毕后第二电机401带动中间块407、电磁铁408、金属块和壳体3041复位,当需要倒入下一个壳体3041内的食材时,通过第一电机301、支杆302和料盘303等结构的配合,带动四个壳体3041转动,此时电磁铁408已关闭,空的壳体3041以及对应的金属块错开,在弹簧和连杆409的作用下,隔环3044和凸块3043自动复位,空壳体3041内的沥水孔恢复流通状态;而下一个盛料的壳体3041转动至与电磁铁408对应,启动电磁铁408通过金属块、凸块3043、连杆409和弹簧等结构的配合,又带动该壳体3041的隔环3044转动使得沥水孔封闭,再通过第二电机401、光轴405、滑块404和连杆409等结构的配合,带动盛料的壳体3041向锅体7转动完成送料,并依次往复。
60.实施例二中,虽然通过电磁铁408、金属块、丝杆403和连杆409等结构的配合,可以实现壳体3041向锅体7方向的转动完成送料,但是在送料过程中会出现水滴飞扬的情况,随着壳体3041的持续转动,会使得多个部件都附着大量水滴,进而影响整体的使用,存在一定的使用局限性。相比于实施例二,通过电磁铁408、金属块、凸块3043和隔环3044等结构的配合,当电磁铁408与金属块吸附时,可以带动隔环3044沿着壳体3041内部转动将沥水孔封闭,进而在壳体3041转动送料时不会出现水滴飞扬的情况,不会对整体使用产生影响;当电磁铁408与金属块分离后,可以带动隔环3044自动复位以恢复沥水孔流通,不会影响后续壳体3041的使用以及对食材的沥水;同时收集筒3042与壳体3041螺纹连接,拆装和清理均十分方便,适用性更强。
61.实施例四:
62.请参阅图1至图12,本发明实施例提供一种自动炒菜机器人的控制方法:第一步首先通过控制面板10启动电磁炉2开始加热并启动泵体自动加油;第二步通过控制面板10启动翻盖机构5将锅盖503与锅体7分离,然后启动倒菜机构4将送菜机构3内的一部分食材倒入锅体7(此时的食材需要按照炒菜步骤依次摆放);第三步通过控制面板10启动翻盖机构5将锅盖503与锅体7闭合,并启动炒菜机构6转动翻炒,此时电磁炉2保持加热状态;第四步通过控制面板10启动翻盖机构5将锅盖503与锅体7分离,并启动送菜机构3将剩余食材调至与倒菜机构4对应,倒菜机构4将送菜机构3内的剩余食材倒入锅体7内,此时手动可加入适量调味料,也可以将调味料放入送菜机构3中;第五步通过控制面板10启动翻盖机构5将锅盖503与锅体7闭合,再启动炒菜机构6转动翻炒完成炒菜,在此过程中若需要加水则控制面板10还会启动泵体自动加水;第六步炒完菜后先启动翻盖机构5将锅盖503与锅体7分离将菜品取出,然后控制面板10启动翻盖机构5将锅盖503与锅体7闭合并启动泵体自动加水,再启
动炒菜机构6持续搅动,实现对锅体7和炒菜机构6的有效清洗,此时电磁炉2处于关闭状态。
63.炒菜流程是由使用者自行预先编排,采用什么火力、炒多久、什么时候下油、加多少油、什么时候下哪个料、什么时候下水等等,都是使用者配合控制面板10自行设定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1