清洁机器人的控制方法及控制装置、清洁基站的控制方法与流程
1.本发明涉及家用智能设备技术领域,尤其涉及一种清洁机器人的控制方法及控制装置、清洁基站的控制方法。
背景技术:
2.家用智能设备在人们的生活中发挥着越来越重要的作用。由此,越来越多的家用智能设备出现在人们的生活中。其中,清洁机器人是较为常见的一种家用智能设备。清洁机器人配置有清洁基站,清洁基站设有机器人停靠空间,清洁机器人可以停靠在机器人停靠空间内,进而实现充电、清洗拖布、更换拖布盘等作业。
3.在具体的工作过程中,清洁机器人会频繁地回到清洁基站中进行相应的作业。相关技术涉及的清洁基站通过发射红外光,清洁机器人会感应到红外光,从而来确定回到清洁基站的路径。但是,在清洁基站的左侧或右侧出现障碍物的情况下,清洁基站发出的红外光会投射到障碍物上,进而被障碍物反射至行进在清洁基站前侧的清洁机器人上,进而会对清洁机器人带来干扰,使得清洁机器人误以为自己处于清洁基站的左侧或右侧,最终会导致清洁机器人调节本来已处于正确的回清洁基站的路径,进而导致清洁机器人不容易回到清洁基站中。
技术实现要素:
4.本发明公开一种清洁机器人的控制方法及控制装置、清洁基站的控制方法及控制装置和清洁机器人系统,以解决清洁基站发出的红外光投射到障碍物上,进而反射至行进在清洁基站的前侧的清洁机器人上,而影响清洁机器人回清洁基站问题。
5.为了解决上述技术问题,本发明是这样实现的:
6.第一方面,本技术公开一种清洁机器人的控制方法,所述清洁机器人与清洁基站无线通信连接,所述清洁基站设有前侧红外灯、左侧红外灯和右侧红外灯,所述前侧红外灯可向所述清洁基站的前侧方向发射第一红外线,所述左侧红外灯可向所述清洁基站的左侧方向发射第二红外线,所述右侧红外灯可向所述清洁基站的右侧方向发射第三红外线,所述控制方法包括:
7.检测所述清洁基站周围的障碍物;
8.在所述清洁机器人接收到所述第一红外线,且所述障碍物仅包括左侧障碍物的情况下,发出控制所述左侧红外灯关闭或变暗的第一指令;
9.在所述清洁机器人接收到所述第一红外线,且所述障碍物仅包括右侧障碍物的情况下,发出控制所述右侧红外灯关闭或变暗的第二指令;
10.在所述清洁机器人接收到所述第一红外线,且所述障碍物包括左侧障碍物和右侧障碍物的情况下,发出控制所述左侧红外灯和所述右侧红外灯均关闭或变暗的第三指令。
11.第二方面,本技术还公开一种清洁机器人的控制装置,所述清洁机器人与清洁基站无线通信连接,所述清洁基站设有前侧红外灯、左侧红外灯和右侧红外灯,所述前侧红外
灯可向所述清洁基站的前侧方向发射第一红外线,所述左侧红外灯可向所述清洁基站的左侧方向发射第二红外线,所述右侧红外灯可向所述清洁基站的右侧方向发射第三红外线,所述控制装置包括:
12.检测模块,用于检测所述清洁基站周围的障碍物;
13.第一控制模块,用于在所述清洁机器人接收到所述第一红外线,且所述障碍物仅包括左侧障碍物的情况下,发出控制所述左侧红外灯关闭或变暗的第一指令;
14.第二控制模块,用于在所述清洁机器人接收到所述第一红外线,且所述障碍物仅包括右侧障碍物的情况下,发出控制所述右侧红外灯关闭或变暗的第二指令;
15.第三控制模块,用于在所述清洁机器人接收到所述第一红外线,且所述障碍物包括左侧障碍物和右侧障碍物的情况下,发出控制所述左侧红外灯和所述右侧红外灯均关闭或变暗的第三指令。
16.第三方面,本技术还公开一种清洁基站的控制方法,所述清洁基站与清洁机器人无线通信连接,所述清洁基站设有前侧红外灯、左侧红外灯和右侧红外灯,所述前侧红外灯可向所述清洁基站的前侧方向发射第一红外线,所述左侧红外灯可向所述清洁基站的左侧方向发射第二红外线,所述右侧红外灯可向所述清洁基站的右侧方向发射第三红外线,所述控制方法包括:
17.接收在所述清洁机器人接收到所述第一红外线,且所述障碍物仅包括左侧障碍物的情况下发出的第一指令;
18.响应于所述第一指令,控制所述左侧红外灯关闭或变暗;
19.接收在所述清洁机器人接收到所述第一红外线,且所述障碍物仅包括右侧障碍物的情况下发出的第二指令;
20.响应于所述第二指令,控制所述右侧红外灯关闭或变暗;
21.接收在所述清洁机器人接收到所述第一红外线,且所述障碍物包括左侧障碍物和右侧障碍物的情况下发出的第三指令;
22.响应于所述第三指令,控制所述左侧红外灯和所述右侧红外灯均关闭或变暗。
23.第四方面,本技术还公开一种清洁基站的控制装置,所述清洁基站与清洁机器人无线通信连接,所述清洁基站设有前侧红外灯、左侧红外灯和右侧红外灯,所述前侧红外灯可向所述清洁基站的前侧方向发射第一红外线,所述左侧红外灯可向所述清洁基站的左侧方向发射第二红外线,所述右侧红外灯可向所述清洁基站的右侧方向发射第三红外线,所述控制装置包括:
24.第一接收模块,用于接收在所述清洁机器人接收到所述第一红外线,且所述障碍物仅包括左侧障碍物的情况下发出的第一指令;
25.第四控制模块,用于响应于所述第一指令,控制所述左侧红外灯关闭或变暗;
26.第二接收模块,用于接收在所述清洁机器人接收到所述第一红外线,且所述障碍物仅包括右侧障碍物的情况下发出的第二指令;
27.第五控制模块,用于响应于所述第二指令,控制所述右侧红外灯关闭或变暗;
28.第三接收模块,用于接收在所述清洁机器人接收到所述第一红外线,且所述障碍物包括左侧障碍物和右侧障碍物的情况下发出的第三指令;
29.第六控制模块,用于响应于所述第三指令,控制所述左侧红外灯和所述右侧红外
灯均关闭或变暗。
30.第五方面:
31.本技术还公开一种清洁机器人系统,包括清洁机器人和清洁基站,所述清洁基站与所述清洁机器人无线通信连接,所述清洁基站设有前侧红外灯、左侧红外灯和右侧红外灯,所述前侧红外灯可向所述清洁基站的前侧方向发射第一红外线,所述左侧红外灯可向所述清洁基站的左侧方向发射第二红外线,所述右侧红外灯可向所述清洁基站的右侧方向发射第三红外线;
32.所述清洁机器人包括第二方面所述的清洁机器人的控制装置。
33.本发明采用的技术方案能够达到以下技术效果:
34.在本技术公开的实施例中,在清洁机器人接收到第一红外线时,说明清洁机器人位于清洁基站的前侧,在检测到清洁基站的左侧和/或右侧存在障碍物时,通过发出控制相应的第一指令、第二指令或第三指令,以使清洁基站左侧红外灯和/或右侧红外灯关闭或变暗,从而避免或缓解左侧红外灯和/或右侧红外灯发出的第二红外线和/或第三红外线被障碍物反射后对行进在清洁基站的前侧的清洁机器人产生不良影响,从而解决了第二红外线和第三红外线碰到障碍物后被反射至行进在清洁基站的前侧的清洁机器人,而对清洁机器人造成干扰而误以为自己在清洁基站的左侧或右侧,进而导致清洁机器人不容易回到清洁基站的问题。
附图说明
35.图1为清洁基站的左侧和右侧均存在障碍物时,在左侧红外灯和右侧红外灯正常发光时,清洁机器人回基站时所接收到红外线的情况;
36.图2为清洁基站仅左侧存在障碍物时,在左侧红外灯正常发光时,清洁机器人回基站时所接收到红外线的情况;
37.图3为清洁基站仅右侧存在障碍物时,在右侧红外灯正常发光时,清洁机器人回基站时所接收到红外线的情况;
38.图4为本发明实施例公开的清洁基站仅左侧存在多个间隔设置的障碍物时,在左侧红外灯正常发光时,清洁机器人回基站时所接收到红外线的情况;
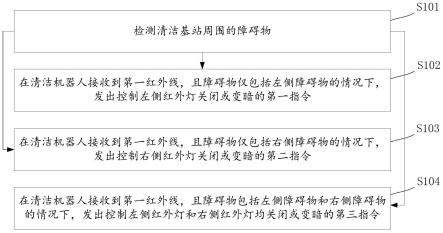
39.图5为本发明实施例公开的清洁机器人的控制方法的流程图;
40.图6为第一种检测清洁基站周围的障碍物的方法流程图;
41.图7为第二种检测清洁基站周围的障碍物的方法流程图;
42.图8为本技术实施例公开的一种清洁机器人的控制装置的结构示意图。
43.附图标记说明:
44.100-清洁机器人、
45.200-清洁基站、
46.310-第一红外线、320-第二红外线、330-第三红外线、
47.410-左侧障碍物、420-右侧障碍物。
具体实施方式
48.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及
相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
49.以下结合附图1至图8,详细说明本发明各个实施例公开的技术方案。
50.请参考图1至图4,本发明实施例公开一种清洁机器人100的控制方法,其中,所公开的清洁机器人100与清洁基站200组成清洁机器人系统。清洁机器人100与清洁基站200无线通信连接,例如通过蓝牙、wifi等无线通信方式连接。清洁机器人100可在清洁基站200的机器人停靠空间内进行充电、清洗拖布、更换拖布等作业。
51.清洁基站200设有前侧红外灯、左侧红外灯和右侧红外灯。前侧红外灯可向清洁基站200的前侧方向发射第一红外线310,左侧红外灯可向清洁基站200的左侧方向发射第二红外线320,右侧红外灯可向清洁基站200的右侧方向发射第三红外线330。第一红外线310、第二红外线320和第三红外线330可以是不同频率或不同波长的红外线,从而方便清洁机器人100对第一红外线310、第二红外线320和第三红外线330的识别。
52.需要说明的是,机器人停靠空间有进出口,以供清洁机器人通过进出口进出机器人停靠空间。本文中,进出口的朝向为前侧方向。
53.清洁机器人100需要回清洁基站200进行相应的作业时,通常只有检测到自己位于清洁基站200的前侧时才会进行回清洁基站200的动作。在清洁基站200的周围不存在障碍物时,清洁机器人100通常只能检测到第一红外线310、第二红外线320和第三红外线330中的一者。在清洁机器人100只检测到第一红外线310的情况下,说明清洁机器人100处于清洁基站200的前侧,清洁机器人100可以直接行进到清洁基站200的机器人停靠空间内进行相应的作业。在清洁机器人100只检测到第二红外线320和第三红外线330中的一者的情况下,说明清洁机器人100位于清洁基站200的左侧或者右侧,此时清洁机器人100想要回到清洁基站200需要向清洁基站200的前侧方向移动,在移动的过程中清洁机器人100可以始终处于接收红外线的状态,也可以是周期性的接收红外线的状态,直至清洁机器人100只检测到第一红外线310时,可以确认清洁机器人100位于清洁基站200的前侧方向,从而清洁机器人100可以行进至清洁基站200。
54.在清洁机器人100没有接收到第一红外线310、第二红外线320和第三红外线330中的任一者时,清洁机器人100可以始终处于能接收红外线的状态,也可以是周期性处于能接收红外线的状态,并进行相应的行进动作,直至接收到第一红外线310、第二红外线320和第三红外线330中的一者后,进行上述的相应操作。然而,在很多时候,清洁基站200的周围会存在各种障碍物,例如在清洁基站200的周围存在墙体、电器、家具等障碍物,在第二红外线320和第三红外线330碰到障碍物后会被反射至行进在清洁基站200的前侧的清洁机器人100,而对清洁机器人100造成干扰而误以为自己在清洁基站200的左侧或右侧,从而会导致清洁机器人100调节原本处于正确的回清洁基站200的路径,进而导致清洁机器人100不容易回到清洁基站200中。为了解决第二红外线320和第三红外线330碰到障碍物后会被反射至行进在清洁基站200的前侧的清洁机器人100,而对清洁机器人100造成干扰而误以为自己在清洁基站200的左侧或右侧,进而导致清洁机器人100不容易回到清洁基站200的问题,请参考图5,本技术公开的控制方法包括:
55.s101,检测清洁基站200周围的障碍物。
56.检测清洁基站200周围的障碍物可以是在清洁机器人100出站的过程中,或者是在清洁机器人100回清洁基站200的过程中进行检测的。清洁机器人100可以根据接收到的第一红外线310、第二红外线320和第三红外线330来检测清洁基站200的周围是否存在障碍物,并可以确定障碍物位于清洁基站200的前侧、左侧或右侧。检测清洁基站200周围的障碍物也可以是在清洁机器人100出站后进行清扫任务的过程中进行检测,清洁机器人100可以通过在进行清扫任务时形成的清扫地图来检测清洁基站200的周围是否存在障碍物,并可以确定障碍物位于清洁基站200的前侧、左侧或右侧。
57.s102,在清洁机器人100接收到第一红外线310,且障碍物仅包括左侧障碍物410的情况下,发出控制左侧红外灯关闭或变暗的第一指令。
58.左侧红外灯变暗是指将左侧红外灯的亮度降低至预设亮度(该预设亮度比正常发光的亮度低),使得左侧红外灯发出的第二红外线320经障碍物反射后不会干扰清洁机器人100,例如无法使清洁机器人100接收到第二红外线320。在左侧红外灯关闭或变暗后,将会避免第二红外线320对清洁机器人100造成干扰。
59.s103,在清洁机器人100接收到第一红外线310,且障碍物仅包括右侧障碍物420的情况下,发出控制右侧红外灯关闭或变暗的第二指令。
60.右侧红外灯变暗是指将右侧红外灯的亮度降低至预设亮度,使得右侧红外灯发出的第三红外线330经障碍物反射后不会干扰清洁机器人100,例如无法使清洁机器人100接收到第三红外线330。在右侧红外灯关闭或变暗后,将会避免第三红外线330对清洁机器人100造成干扰。
61.s104,在清洁机器人100接收到第一红外线310,且障碍物包括左侧障碍物410和右侧障碍物420的情况下,发出控制左侧红外灯和右侧红外灯均关闭或变暗的第三指令。
62.需要说明的是,控制左侧红外灯和右侧红外灯变暗或变亮可以通过控制相应的电流强度来控制左侧红外灯和右侧红外灯的发射强度,以使左侧红外灯和右侧红外灯变暗或变亮。
63.检测清洁基站200周围的障碍物无论是在清洁机器人100出站的过程中,还是在清洁机器人100回清洁基站200的过程中,又或是在清洁机器人100出站后进行清扫任务的过程中进行检测,都是可以是在检测到清洁基站200的左侧和/或右侧存在障碍物时,控制相应的左侧红外灯和/或右红外灯关闭或变暗。在清洁机器人100出站的过程中,或在清洁机器人100出站后进行清扫任务的过程中检测障碍物的方式中,在清洁机器人100回清洁基站200之前已经根据检测结果以对左侧红外灯和/或右侧红外灯进行相应的控制,清洁机器人100在回清洁基站200的过程将不会受到障碍物反射的干扰信号,进而使得回站工作较为顺畅。在清洁机器人100回清洁基站200的过程中检测障碍物的方式中,清洁机器人100可以在回清洁基站200的过程中实时检测,并进行相应的控制。
64.在本技术公开的实施例中,在清洁机器人100接收到第一红外线310时,说明清洁机器人100位于清洁基站200的前侧,在检测到清洁基站200的左侧和/或右侧存在障碍物时,通过发出控制相应的第一指令、第二指令或第三指令,以使清洁基站200左侧红外灯和/或右侧红外灯关闭或变暗,从而避免或缓解左侧红外灯和/或右侧红外灯发出的第二红外线320和/或第三红外线330被障碍物反射后对行进在清洁基站200的前侧的清洁机器人100产生不良影响,从而解决了第二红外线320和第三红外线330碰到障碍物后被反射至行进在
清洁基站200的前侧的清洁机器人100,而对清洁机器人100造成干扰而误以为自己在清洁基站200的左侧或右侧,进而导致清洁机器人100不容易回到清洁基站200的问题。
65.为了检测清洁基站200周围的障碍物,清洁机器人100可以具有环境构图模块。清洁机器人100在出站后进行清扫的过程中,清洁机器人100可以通过环境构图模块获取清洁基站200周围的清扫地图,具体的,清洁机器人100可以是在首次出清洁基站200时,清洁机器人100在运动的过程中,通过环境构图模块构建清扫地图,从而也获取到了清洁基站200周围的环境信息,进而可以从清扫地图上确定清洁基站200周围是否存在障碍物。
66.请参考图6,在本技术公开的控制方法中,检测清洁基站200周围的障碍物,即s101,包括:
67.s201,通过环境构图模块检测清扫地图。
68.清洁机器人100可以是在首次出清洁基站200时,清洁机器人100先进行无序的运动,通过环境构图模块获取运动过程中的环境信息,从而将获取到的环境信息通过分析、组合等过程构建成清扫地图。清洁机器人100在其他出站进行清扫任务的过程中,可以通过环境构图模块构建的清扫地图,与首次出站形成的清扫地图比较以确认障碍物。当然,也可以直接分析清扫过程中形成的清扫地图确认障碍物。
69.s202,从清扫地图中确定清洁基站周围的障碍物。
70.通过分析清扫地图,可以确认清洁基站200周围是否存在障碍物。例如分析在清扫地图的左侧、右侧或前侧一定范围内是否存在遮挡物。
71.本技术通过环境构图模块检测到清扫地图后,可以一目了然的从清扫地图上获取到清洁基站200周围的环境信息,从而充分利用了自身的环境构图模块来对清扫地图进行建模、分析,从而确定清洁基站200周围的障碍物。具体确定过程为现有技术,在此不再赘述。
72.请参考图7,在另一种检测清洁基站200周围的障碍物的控制方法中,检测清洁基站200周围的障碍物的步骤,即s101,包括:
73.s301,在清洁机器人100接收到第一红外线310的情况下,检测清洁机器人100是否接收到第二红外线320或第三红外线330。
74.由于第一红外线310、第二红外线320和第三红外线330可以是不同频率或不同波长的红外线,从而可以实现对第一红外线310、第二红外线320和第三红外线330的区分。
75.s302,在清洁机器人100仅接收到第一红外线310和第二红外线320的情况下,确定清洁机器人100周围的障碍物仅包括左侧障碍物410。
76.s303,在清洁机器人100仅接收到第一红外线310和第三红外线330的情况下,确定清洁机器人100周围的障碍物仅包括右侧障碍物420。
77.s304,在清洁机器人100接收到第一红外线310、第二红外线320和第三红外线330的情况下,确定清洁机器人100周围的障碍物包括左侧障碍物410和右侧障碍物420。
78.具体的,清洁机器人100具有红外接收模块,从而可以接收清洁基站200发出的红外线。清洁机器人100在接收到第一红外线310的情况下,说明清洁机器人100位于清洁基站200的前侧,而清洁机器人100还接收到了第二红外线320和/或第三红外线330,说明第二红外线320和/或第三红外线330经相应的清洁基站200的左侧和/或右侧的障碍物反射后被清洁机器人100接收,从而说明清洁基站200的左侧和/或右侧存在障碍物。
79.在清洁机器人100出清洁基站200的过程中检测清洁基站200周围的障碍物的方式中,清洁机器人100从清洁基站200的前侧出站,此时清洁机器人100能够接收到第一红外线,在出站的过程中接收到第二红外线或第三红外线,说明左侧和/或右侧存在障碍物将第二红外线和/或第三红外线反射至清洁机器人100。
80.在清洁机器人100回清洁基站200的过程检测清洁基站200周围的障碍物的方式实质是红外召回,使得清洁机器人100的红外接收模块根据接收到的红外线的种类,来判断自己的所处的位置,并纠正自己的行进路线,使得清洁机器人100感应到第一红外线310时,向前行进并最终回到清洁基站200的机器人停靠空间内。此时,清洁机器人100靠着接收红外线来指引线路,从而回到清洁基站200中,从而充分利用了自身已有的功能来实现障碍物的判断。
81.在清洁机器人100通过对接收到的红外线进行分析来检测清洁基站200周围是否存在障碍物的方式中,检测清洁机器人100是否接收到第二红外线320或第三红外线330,包括:
82.步骤a1,控制清洁机器人100在当前方向往复运行多次的情况下,检测清洁机器人100是否接收到第二红外线320或第三红外线330。
83.通过清洁机器人100在当前方向往复运行多次来确定到底有没有接收到第二红外线320和/或第三红外线330,从而有利于更准确的检测是否接收到第二红外线320和/或第三红外线330,进而使得对障碍物的判断更准确。往复运行可以在预设长度的区域内进行。
84.进一步的,本技术公开的控制方法还包括:
85.步骤b1,在清洁机器人100仅接收到第一红外线310的情况下,控制清洁机器人100在当前行进方向上进行行进。
86.在清洁机器人100在出清洁基站200的过程中或在回清洁基站200的过程中仅接收到第一红外线310的情况,说明清洁基站200的周围没有障碍物,清洁及机器人100可以正常行进以实现清洁机器人100出清洁基站200或回清洁基站200。
87.本技术公开一种清洁机器人100的控制装置,清洁机器人100与清洁基站200无线通信连接,清洁基站200设有前侧红外灯、左侧红外灯和右侧红外灯,前侧红外灯可向清洁基站200的前侧方向发射第一红外线310,左侧红外灯可向清洁基站200的左侧方向发射第二红外线320,右侧红外灯可向清洁基站200的右侧方向发射第三红外线330。需要说明的是,本实施例中清洁基站200和清洁机器人100与上述实施例公开的清洁基站200和清洁机器人100具有相同或相似之处,彼此可以相互参照。请参考图8,所公开的控制装置包括检测模块801、第一控制模块802、第二控制模块803、第三控制模块804,其中:
88.检测模块801,用于检测清洁基站200周围的障碍物。
89.第一控制模块802,用于在清洁机器人100接收到第一红外线310,且障碍物仅包括左侧障碍物410的情况下,发出控制左侧红外灯关闭或变暗的第一指令。
90.第二控制模块803,用于在清洁机器人100接收到第一红外线310,且障碍物仅包括右侧障碍物420的情况下,发出控制右侧红外灯关闭或变暗的第二指令。
91.第三控制模块804,用于在清洁机器人100接收到第一红外线310,且障碍物包括左侧障碍物410和右侧障碍物420的情况下,发出控制左侧红外灯和右侧红外灯均关闭或变暗的第三指令。
92.本实施例公开的清洁机器人100的控制装置中各个模块所实现的功能与上述控制方法中的步骤具有相同或相似之处,相同或相似之处可以相互参照,这里不再赘述。
93.为了检测清洁基站200周围的障碍物,清洁机器人100还可以具有环境构图模块。所公开检测模块801可以包括第一检测子模块和第一确定子模块,其中:
94.第一检测子模块,用于通过环境构图模块检测清扫地图。
95.第一确定子模块,用于从清扫地图中确定基站周围的所述障碍物。
96.在另一种检测清洁基站200周围障碍物的方式种,检测模块801可以包括第二检测子模块、第二确定子模块、第三确定子模块和第四确定子模块,其中:
97.第二检测子模块,用于在清洁机器人100接收到第一红外线310的情况下,检测清洁机器人100是否接收到第二红外线320或第三红外线330。
98.第二确定子模块,用于在清洁机器人100仅接收到第一红外线310和第二红外线320的情况下,确定清洁机器人100周围的障碍物仅包括左侧障碍物410。
99.第三确定子模块,用于在清洁机器人100仅接收到第一红外线310和第三红外线330的情况下,确定清洁机器人100周围的障碍物仅包括右侧障碍物420。
100.第四确定子模块,用于在清洁机器人100接收到第一红外线310、第二红外线320和第三红外线330的情况下,确定清洁机器人100周围的障碍物包括左侧障碍物410和右侧障碍物420。
101.为了清洁机器人100更准确的判断是否接收到的第二红外线320和/或第三红外线330,所公开的控制装置还可以包括第七控制模块,第七控制模块用于控制清洁机器人100在当前方向往复运行多次。
102.第二检测子模块用于控制清洁机器人100在当前方向往复运行多次的情况下,检测清洁机器人100是否接收到第二红外线320或所述第三红外线330。
103.控制装置还可以包括第八控制模块,第八控制模块用于在清洁机器人100仅接收到第一红外线310的情况下,控制清洁机器人100在当前行进方向上进行行进。
104.本实施例公开的清洁机器人100的控制装置中各个模块所实现的功能与上述实施例中控制方法中的步骤具有相同或相似之处,相同或相似之处可以相互参照,这里不再赘述。
105.本技术还公开一种清洁基站200的控制方法,清洁基站200与清洁机器人100无线通信连接,清洁基站200设有前侧红外灯、左侧红外灯和右侧红外灯,前侧红外灯可向清洁基站200的前侧方向发射第一红外线310,左侧红外灯可向清洁基站200的左侧方向发射第二红外线320,右侧红外灯可向清洁基站200的右侧方向发射第三红外线330。本实施例中的清洁机器人100及清洁基站200与上述实施例中清洁机器人100和清洁基站200具有相同或相似之处,彼此可以相互参照。本实施例公开的控制方法包括:
106.步骤c1,接收在清洁机器人100接收到第一红外线310,且障碍物仅包括左侧障碍物410的情况下发出的第一指令。
107.步骤c2,响应于第一指令,控制左侧红外灯关闭或变暗。
108.步骤c3,接收在清洁机器人100接收到第一红外线310,且障碍物仅包括右侧障碍物420的情况下发出的第二指令。
109.步骤c4,响应于第二指令,控制右侧红外灯关闭或变暗。
110.步骤c5,接收在清洁机器人100接收到第一红外线310,且障碍物包括左侧障碍物410和右侧障碍物420的情况下发出的第三指令。
111.步骤c6,响应于第三指令,控制左侧红外灯和右侧红外灯均关闭或变暗。
112.本实施例中第一指令、第二指令和第三指令与上述实施例中的第一指令、第二指令和第三指令具有相同之处,彼此可以相互参照。
113.在本技术公开的实施例中,清洁基站200接收在清洁机器人100接收到第一红外线310时,且障碍物包括左侧障碍物410和/右侧障碍物420的情况下发出相应的指令,并响应于相应的指令控制左侧红外灯和/或右侧红外灯关闭或变暗,从而避免或缓解左侧红外灯和/或右侧红外灯发出的第二红外线320和/或第三红外线330被障碍物反射后对行进在清洁基站200的前侧的清洁机器人100产生不良影响,从而解决了第二红外线320和第三红外线330碰到障碍物后被反射至行进在清洁基站200的前侧的清洁机器人100,而对清洁机器人100造成干扰而误以为自己在清洁基站200的左侧或右侧,进而导致清洁机器人100不容易回到清洁基站200的问题。
114.本技术还公开一种清洁基站200的控制装置,清洁基站200与清洁机器人100无线通信连接,清洁基站200设有前侧红外灯、左侧红外灯和右侧红外灯,前侧红外灯可向清洁基站200的前侧方向发射第一红外线310,左侧红外灯可向清洁基站200的左侧方向发射第二红外线320,右侧红外灯可向清洁基站200的右侧方向发射第三红外线330,所公开控制装置包括第一接收模块、第四控制模块、第二接收模块、第五控制模块、第三接收模块和第六控制模块,其中:
115.第一接收模块,用于接收在清洁机器人100接收到第一红外线310,且障碍物仅包括左侧障碍物410的情况下发出的第一指令。
116.第四控制模块,用于响应于第一指令,控制左侧红外灯关闭或变暗。
117.第二接收模块,用于接收在清洁机器人100接收到第一红外线310,且障碍物仅包括右侧障碍物420的情况下发出的第二指令。
118.第五控制模块,用于响应于第二指令,控制右侧红外灯关闭或变暗。
119.第三接收模块,用于接收在清洁机器人100接收到第一红外线310,且障碍物包括左侧障碍物410和右侧障碍物420的情况下发出的第三指令。
120.第六控制模块,用于响应于第三指令,控制左侧红外灯和右侧红外灯均关闭或变暗。
121.本实施例中清洁基站200的控制装置中的各个模块所实现的功能与上述实施例中的控制方法的步骤具有相同或相似之处,彼此可以相互参照,这里不再赘述。
122.本技术还公开一种清洁机器人系统,所公开的清洁机器人系统包括清洁机器人和清洁基站。清洁基站与清洁机器人无线通信连接,清洁基站设有前侧红外灯、左侧红外灯和右侧红外灯,前侧红外灯可向清洁基站的前侧方向发射第一红外线,左侧红外灯可向清洁基站的左侧方向发射第二红外线,右侧红外灯可向清洁基站的右侧方向发射第三红外线。清洁机器人包括上述实施例公开的清洁机器人的控制装置。
123.在一些实施例中,清洁基站还包括上述实施例公开的一种清洁基站的控制装置。
124.本发明上文实施例中重点描述的是各个实施例之间的不同,各个实施例之间不同的优化特征只要不矛盾,均可以组合形成更优的实施例,考虑到行文简洁,在此则不再赘
述。
125.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1