清扫机的制作方法
1.本公开涉及一种一边自主地行走一边执行清扫的清扫机。
背景技术:
2.自主行走型的清扫机一边躲避障碍物,一边靠近到障碍物的附近来执行清扫。另一方面,提出一种在障碍物为生物体的情况下以对生物体做出应对的动作执行清扫的清扫机(例如专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-075192号公报
技术实现要素:
6.生物体与其它障碍物不同,不仅存在停止状态的情况,还存在移动的情况。另外,生物体还存在从停止的位置起进行移动的情况。然而,在现有的技术中,难以应对这些生物体特有的动作。
7.本公开是鉴于上述问题点而完成的,其目的在于提供一种能够根据生物体的动作来变更清扫动作的清扫机。
8.为了达成上述目的,本公开的一个方式所涉及的清扫机具备:主体;移动单元,其使主体进行移动;清扫单元,其安装于主体;位置信息获取单元,其获取表示障碍物相对于主体的相对位置关系的位置信息;以及控制装置,其对位置信息进行处理,来控制移动单元和清扫单元。控制装置具备:动作检测部,其基于位置信息来检测障碍物的停止和移动;生物体判定部,其判定障碍物是作为生物体的生物体障碍物还是非生物体障碍物;移动控制部,在被检测出移动的生物体障碍物与主体之间的距离为距离阈值内的情况下,该移动控制部控制移动单元来使主体进行包括停止在内的躲避动作;清扫控制部,其控制移动单元和清扫单元,使得清扫至与被检测出停止的生物体障碍物相距第一距离的位置,并且清扫至与非生物体障碍物相距第二距离的位置,第二距离比第一距离短;以及区域设定部,其将包括停止状态的生物体障碍物的位置的未进行清扫的区域设定为未清扫区域。清扫控制部控制移动单元和清扫单元,使得在对规定的清扫区域的清扫结束之后,如果在未清扫区域内不存在生物体障碍物,则对未清扫区域内进行清扫。
9.根据本公开,能够根据生物体的动作来一边变更清扫的计划一边执行清扫,对于由于停止的生物体而没能清扫到的区域,在生物体移动之后进行清扫。
附图说明
10.图1是示出实施方式所涉及的清扫机的外观的侧视图。
11.图2是示出实施方式所涉及的清扫机的外观的仰视图。
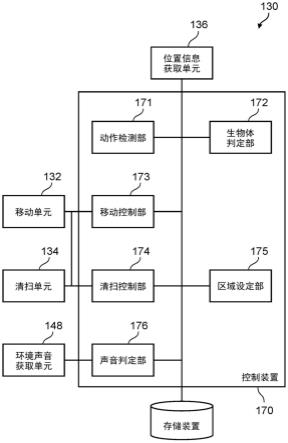
12.图3是示出实施方式所涉及的清扫机所具备的控制装置的功能部的框图。
13.图4是示出实施方式中的楼层地图和清扫计划的图。
14.图5是示出实施方式中的生物体障碍物的位置和清扫机所移动的路径的图。
15.图6是示出实施方式中的作为针对生物体障碍物的躲避距离的第一距离的图。
16.图7是示出实施方式中的在楼层地图上的未清扫区域的图。
17.图8是示出实施方式中的未清扫区域的设定的其它方式的图。
18.图9是示出实施方式所涉及的清扫机所具备的控制装置的动作的流程的流程图。
19.图10是示出实施方式中的使终端装置显示出楼层地图和未清扫区域的状态的图。
具体实施方式
20.下面,参照附图来说明本公开所涉及的清扫机的实施方式。此外,下面的实施方式是为了对本公开进行说明而举出的一个例子,并不旨在对本公开进行限定。例如,在下面的实施方式中示出的形状、构造、材料、构成要素、相对位置关系、连接状态、数值、数式、方法中的各阶段的内容、各阶段的顺序等是一个例子,有时包括未在下面记载的内容。另外,有时使用平行、正交等几何学上的表述,但是这些表述并非表示数学上的严密程度,而是包含实质上容许的误差、偏差等。另外,同时、相同等表述也包含实质上容许的范围。
21.另外,附图是为了对本公开进行说明而进行了适当强调、省略或比例调整的示意性的图,与实际的形状、位置关系以及比例不同。
22.另外,在下面,有时将多个发明作为一个实施方式来进行总括性的说明。另外,将下面记载的内容的一部分设为与本公开有关的任意的构成要素来进行说明。
23.图1是示出实施方式所涉及的清扫机130的外观的侧视图。图2是示出实施方式所涉及的清扫机130的外观的仰视图。清扫机130是一边自主地移动一边执行清扫的机器人型的清扫机,具备主体131、移动单元132、清扫单元134、位置信息获取单元136以及控制装置170。在本实施方式的情况下,清扫机130具备环境声音获取单元148。
24.主体131是作为清扫机130的构造基础的构造构件。另外,主体131作为对移动单元132、清扫单元134、位置信息获取单元136、控制装置170等进行收容或保持的壳体来发挥功能。在主体131的外周部安装有能够相对于主体131沿径向进行位移的保险杠139。另外,如图2所示,在主体131的底面部设置有用于将灰尘抽吸到主体131的内部的吸入口138。
25.移动单元132是基于来自控制装置170的指示来使清扫机130进行行走的装置。移动单元132不被特别地限定,但在本实施方式的情况下,具备以能够旋转的方式安装于主体131的一对轮子140、向轮子140施加转矩的行走用马达(未图示)以及用于收容行走用马达的壳体141。移动单元132还具备在主体131的底面作为辅助轮来发挥功能的脚轮142。清扫机130的主体131能够通过使移动单元132的两个轮子140独立地旋转,来自如地进行直行、后退、左旋转、右旋转等移动。
26.清扫单元134只要对主体131的下侧或主体131的周边的尘埃、污物进行清扫即可,能够例示通过抽吸来集尘、用拖布、无纺布等来进行擦拭清扫等。在本实施方式的情况下,清扫单元134是用于清扫收集尘埃并将灰尘从吸入口138吸入的部件,具备配置于吸入口138的附近的旋转刷146、使旋转刷146旋转的刷驱动马达147、抽吸部件133等。
27.抽吸部件133是将尘埃从吸入口138吸入并将所吸入的尘埃保持在主体131的内部的部件,具备电动风扇(未图示)以及尘埃保持部143。电动风扇通过抽吸尘埃保持部143的
内部的空气并且使空气排出到主体131的外部,来将灰尘从吸入口138吸入并将灰尘收容在尘埃保持部143内。
28.位置信息获取单元136是获取表示障碍物相对于主体131的相对位置关系的位置信息的装置。位置信息获取单元136对存在于主体131的周围的墙壁、家具等障碍物的方向、距离等进行检测,来获取2.5维的位置信息。另外,还能够根据与由位置信息获取单元136检测出的障碍物的方向和距离的信息分开保持的路径地图、楼层地图等楼层信息来掌握清扫机130自身的位置。
29.位置信息获取单元136的种类不被特别地限定,但例如能够例示发射光并基于被障碍物反射回来的光来检测位置和距离的lidar(light detection and ranging:光探测和测距)、tof(time of flight:飞行时间)摄像机等。除此以外,作为位置信息获取单元136,能够例示将障碍物反射的照明光、自然光以像的形式获取从而基于视差来获取位置和距离的复眼摄像机等。
30.环境声音获取单元148是能够获取环境声音的装置。环境声音获取单元148不被特别地限定,但在本实施方式的情况下,是用于对生物体障碍物周边的环境声音进行获取的具备指向性的麦克风。
31.在本实施方式的情况下,清扫机130具备自身位置检测装置(未图示)。自身位置检测装置基于清扫机130通过移动单元132进行移动的实际状况来检测相对于规定位置的相对自身位置。自身位置检测装置的种类不被特别地限定,例如能够例示对移动单元132所具备的通过行走用马达而旋转的一对轮子140各自的旋转角进行检测的编码器等里程计传感器(odometry sensor)等。另外,也可以具备对清扫机130行走时的加速度进行检测的加速度传感器、对清扫机130转动时的角速度进行检测的角速度传感器等惯性传感器等来作为自身位置检测装置。另外,自身位置检测装置也可以具备lps(local positioning system:局部定位系统)。
32.本实施方式的清扫机130使用slam(simultaneous localization and mapping:同步定位与地图构建)来获取自身位置。具体而言,一边连续获取里程计和lidar的扫描数据一边进行地图的制作,基于制作出的地图,通过计算来获取自身位置。
33.图3是示出控制装置170的功能部的框图。控制装置170是具备对位置信息获取单元136获取到的位置信息进行处理来控制移动单元132和清扫单元134的处理器的装置。控制装置170具备动作检测部171、生物体判定部172、移动控制部173、清扫控制部174以及区域设定部175来作为通过使处理器执行程序而实现的处理部。在本实施方式的情况下,控制装置170还具备声音判定部176来作为处理部。下面对各处理部进行说明,但说明的顺序与控制装置170的处理流程不一致。此外,在后面记述控制装置170的处理流程。
34.动作检测部171基于从位置信息获取单元136获取到的位置信息来检测障碍物的停止和移动。例如,在清扫机130仅具备lidar来作为位置信息获取单元136的情况下,通过对位置信息的经时变化进行分析来判定障碍物有没有进行动作。另外,在将生物体限定为人的情况下,也可以预先存储踝、腓等与照射lidar的激光的高度位置对应的人的脚在水平面上的截面形状,根据位置信息来追踪脚的截面形状,由此检测移动、停止。
35.具体而言,能够例示以下情况:将lidar点群分割为接近的点的集合(簇),针对每个簇基于与脚的截面形状的相似度来进行判定。另外,餐桌的下方等桌脚、椅子脚等家具的
脚密集的区域能够利用规定的范围内的簇数的密度来进行判定,因此在密度为规定值以上的情况下,也可以将对人的脚进行判断的判定条件(相似度)设得严格。
36.在本实施方式的情况下,动作检测部171除检测障碍物的移动和停止之外,还检测障碍物相对于主体131的相对移动方向。例如,将笔直地朝向主体而来的方向设为0
°
,从而将障碍物的移动方向检测为角度。
37.生物体判定部172判定位置信息获取单元136获取到的障碍物是作为生物体的生物体障碍物还是非生物体障碍物。生物体判定部172的判定方法不被特别地限定。例如也可以是,在由动作检测部171检测出障碍物的移动的情况下,生物体判定部172将移动的障碍物判定为生物体障碍物。另外,也可以是,在原本进行移动的障碍物停止了的情况下,生物体判定部172将进行了移动的障碍物以及存在于停止位置的障碍物判定为生物体障碍物。另外,生物体判定部172也可以预先存储照射lidar的激光的高度位置处的端坐的人的截面形状、盘腿坐的人的截面形状、横卧的人的截面形状等,将根据位置信息获得的形状与所存储的形状进行比较来判定停止的障碍物是生物体障碍物还是非生物体障碍物。
38.此外,也可以是,清扫机130具备红外线传感器,生物体判定部172基于来自红外线传感器的信号在障碍物发出36℃左右的热的情况下,将障碍物判定为生物体障碍物。另外,也可以是,清扫机130具备摄像机,生物体判定部172对来自摄像机的图像进行分析来将障碍物判定为生物体障碍物,并且确定生物体的种类。另外,也可以是,生物体判定部172从环境声音获取单元148获取环境声音,根据人声、脚步声等来将障碍物判定为生物体障碍物。
39.在被检测出移动的障碍物与主体131之间的距离为距离阈值内的情况下,移动控制部173控制移动单元132来使主体131进行包括停止在内的躲避动作。距离阈值既可以是预先决定的恒定值,也可以基于障碍物与主体131的相对移动速度而改变。在本实施方式的情况下,如果基于由动作检测部171检测出的障碍物的移动方向和主体131的移动方向而移动的障碍物与主体131将来不会发生碰撞,则移动控制部173控制移动单元132,使得主体131继续移动。例如,也可以是,移动控制部173从动作检测部171获取移动的障碍物的移动方向和与移动方向正交的方向上的障碍物的宽度,在考虑障碍物的宽度和移动方向、以及主体131的宽度和移动方向而能够估计为障碍物与主体131会接触的情况下,设为障碍物与主体131将来会碰撞而使主体131进行躲避动作。具体的躲避动作能够例示暂时停止、使主体131以与障碍物之间的距离为规定距离以上的方式进行移动的迂回动作等。此外,在由生物体判定部172进行的是生物体障碍物还是非生物体障碍物的判定的准确度为中等程度的情况下,可以使以下动作也包含在躲避动作中,该动作是:使主体131暂时停止、减速、或者以与障碍物之间的距离为规定距离的方式进行动作,并使生物体判定部172再次进行障碍物是否为生物体的判定。例如在位置信息获取单元136为lidar的情况下,与障碍物之间的距离越短,则能够越详细且越多地获取障碍物的信息,因此生物体判定部172的判定精度提高,能够使主体131执行更有效的躲避动作。
40.清扫控制部174事先获取如图4所示的楼层地图。另外,清扫控制部174事先获取在图4中以箭头表示的那样的清扫计划。在楼层地图中预先登记有墙壁、柱子、隔板、家具等非生物体障碍物210的配置。清扫控制部174一边使用所获取到的楼层地图一边按照清扫计划控制移动单元132和清扫单元134来执行清扫。在本实施方式的情况下,将图4所示的整个清扫区域分割为多个区域(在本实施方式中为四个区域),并针对其中的每个区域设定了清扫
计划。清扫控制部174针对每个区域执行清扫。
41.在如图5所示那样对生物体障碍物200的附近进行清扫的情况下,清扫控制部174控制移动单元132和清扫单元134,使得如图6所示那样清扫至与生物体障碍物200相距第一距离201的位置,上述的生物体障碍物200是通过动作检测部171而被检测出停止的障碍物且由生物体判定部172判定为是生物体障碍物。也就是说,清扫控制部174控制移动单元132,使得以与生物体障碍物200分离第一距离201的状态躲避生物体障碍物200。另外,清扫控制部174控制移动单元132和清扫单元134,使得清扫至与非生物体障碍物210相距第二距离的位置,第二距离比第一距离201短。
42.第一距离201不被具体地限定,但例如被设定为即使在停止的生物体障碍物200改变姿势那样的情况下也不会与主体131接触的程度的距离。第二距离例如被设定为旋转刷146的前端部与非生物体障碍物210接触的程度的距离。
43.此外,在由后述的区域设定部175设定了未清扫区域的情况下,清扫控制部174控制移动单元132和清扫单元134,使得在按照清扫计划对规定的清扫区域(在本实施方式中为四个区域中的一个)的清扫结束之后,如果在所设定的未清扫区域内不存在生物体障碍物,则对未清扫区域内进行清扫。由此,能够自主地对由于生物体障碍物的存在而没能清扫到的区域进行清扫,从而能够达成清扫计划。
44.另外,在由后述的声音判定部176判定为在停止的生物体障碍物200的周边环境声音中包含从音频设备发出的声音的情况下,清扫控制部174控制移动单元132和清扫单元134中的至少一方,以抑制从主体131传到生物体障碍物200的声音。例如,通过控制移动单元132和清扫单元134,使得清扫至与障碍物相距比第一距离201长的第三距离的位置,能够抑制从主体131传到生物体障碍物200的声音。另外,通过抑制主体131的移动速度、抑制清扫单元134的抽吸力、抑制旋转刷的旋转速度等也能够抑制从主体131传到生物体障碍物200的声音。
45.如图7所示,区域设定部175将包括停止状态的生物体障碍物200的位置的未清扫的区域设定为未清扫区域300。未清扫区域300的设定方法不被特别地限定,但例如区域设定部175记录主体131按照清扫计划行走的实际状况,将包含于清扫计划且主体131没能行走到的区域设定为未清扫区域。由此,如图7中由a示出的区域那样,将由于被生物体障碍物200遮挡而没能清扫到的区域也设定为未清扫区域。
46.此外,也可以是,在如图8中由b示出的区域那样的在被非生物体障碍物210包围的区域的面积为面积阈值以下的区域内存在生物体障碍物200的情况下,区域设定部175中止对该区域内进行清扫的控制,并将被非生物体障碍物210包围的区域设定为未清扫区域300。由此,能够防止在厨房等狭窄的场所中有人存在的情况下,清扫机130靠近到人的脚边而妨碍人的作业的情况。
47.另外,即使是由于生物体障碍物200的存在而设定为未清扫区域300的区域,在餐桌的下方等桌脚、椅子脚等家具的脚密集的区域中,区域设定部175也可以将所设定的未清扫区域300解除。这是由于,在家具脚密集的区域,家具的脚的截面形状与人的脚的截面形状相似,因此发生误判定的可能性高,主体131进入家具脚密集的区域到脱离家具脚密集的区域为止的时间长变。
48.声音判定部176判定在被检测出停止的生物体障碍物200的周边的环境声音中是
否存在从音频设备发出的声音即音频设备声音。音频设备例如是电视、音响等,是利用扬声器来发出声音的装置。音频设备声音的判定方法不被特别地限定,但例如从扬声器发出的人的对话、歌声、演奏等包含于音频设备声音,以单调的周期产生的声音、以恒定的音量产生的声音等被从音频设备声音中排除。
49.接着,对清扫机130所具备的控制装置170的控制动作进行说明。图9是示出控制装置170的控制动作的流程的流程图。
50.清扫机130按照所设定的清扫计划执行清扫直到该清扫计划结束(s101)。在清扫期间,使用位置信息获取单元136来依次获取障碍物的位置信息(s102)。此外,清扫机130使用位置信息获取单元136和自身位置检测装置等来一边识别在楼层地图中的自身位置一边推进清扫计划。
51.动作检测部171基于位置信息获取单元136依次获取到的位置信息,来检测障碍物的动作(s103)。在距离阈值以内的障碍物正在移动的情况下,移动控制部173控制移动单元132以使主体131进行躲避动作,直到原则上判断为障碍物离开了距离阈值以上为止(s104)。此外,在障碍物远离主体131的情况下、或者在能够预测为主体131与移动的障碍物不会接触的情况下,还有时考虑障碍物与主体131的相对移动方向而不使主体131暂时停止。
52.接着,判定停止且不存在于楼层地图的障碍物是否为生物体(s105)。在障碍物为非生物体障碍物210的情况下,以靠近非生物体障碍物210至与非生物体障碍物210的距离为第二距离的方式执行清扫(s106)。此外,对于存在于楼层地图的非生物体障碍物210,也按照清扫计划以靠近至第二距离的方式执行清扫。
53.在障碍物是生物体障碍物200且生物体障碍物200的周围的环境声音中包含音频设备声音的情况下(s107),通过一边以与生物体障碍物200分离第三距离的状态躲避生物体障碍物200一边执行清扫等的静音模式来进行清扫(s108)。在生物体障碍物200的周围的环境声音中不包含音频设备声音的情况下(s107),以不是静音模式的通常模式,一边以与生物体障碍物200分离第一距离的状态躲避生物体障碍物200一边执行清扫(s109)。
54.接着,区域设定部175将由于一边躲避停止状态的生物体障碍物200一边执行清扫而没能清扫到的区域设定为未清扫区域300(s110)。执行上面的处理,直到针对每个区域的清扫计划结束为止(s101),如果一个区域的清扫计划结束(s101:“是”),则清扫控制部174基于来自位置信息获取单元136的位置信息来确认在所设定的未清扫区域300中是否存在生物体障碍物200(s111)。在清扫计划结束的阶段无法确认未清扫区域300中有没有生物体障碍物200的情况下,清扫控制部174使主体131移动到能够确认未清扫区域300的位置。在未清扫区域300中不存在生物体障碍物200的情况下,清扫控制部174对未清扫区域300执行清扫(s112)。此外,区域设定部将被执行了清扫后的未清扫区域300视作清扫完毕来进行处理。
55.针对划分出的每个清扫区域执行上面的处理,但由于存在生物体障碍物200而没能清扫到的未清扫区域300被进行保存,直至整个清扫区域的清扫计划结束为止。
56.根据上面的实施方式所涉及的清扫机130,在距离阈值内存在移动的障碍物的情况下,通过暂时停止主体131的移动,能够避免碰撞。另外,针对停止的生物体障碍物200,能够通过与该生物体障碍物200隔开比与非生物体障碍物210隔开的距离更远的距离执行清
扫,来应对生物体障碍物200的突然的姿势变化等。
57.除此以外,基于停止的生物体障碍物200终会移动这一见解,能够通过在规定的区域的清扫计划结束之后对由于生物体障碍物200的存在而没能清扫到的未清扫区域300进行清扫,来达成清扫计划。
58.另外,在生物体障碍物200的周边的环境声音中包含音频设备声音的情况下,能够估计为生物体障碍物200正在收看电视或鉴赏音乐等,从而抑制生物体障碍物200听见的清扫机130的声音,来缓和清扫执行期间的噪音。
59.此外,本公开不限定于上述实施方式。例如,也可以将本说明书中记载的构成要素任意地进行组合或者将构成要素中的若干个排除而实现的其它实施方式设为本公开的实施方式。另外,在不脱离本公开的主旨、即权利要求书所记载的语句所示的意思的范围内能够对上述实施方式实施本领域技术人员所想到的各种变形而获得的变形例也包含于本公开。
60.例如,对将整个清扫区域分割为四个区域且每当对一个区域的清扫结束时对未清扫区域进行清扫的情况进行了说明,但也可以在整个清扫区域结束之后对未清扫区域进行清扫。
61.另外,也可以是,在清扫时间超过了规定的时间时,即使是在对一个区域的清扫结束之后或者对整个区域的清扫结束之后也不执行未清扫区域的清扫。
62.另外,也可以是,清扫机130具备能够与例如智能手机那样的终端装置进行通信的通信单元,来向终端装置发送清扫机130所具备的楼层地图,发送表示楼层地图中的未清扫区域的位置和范围的未清扫信息。图10是示出使终端装置160显示出楼层地图和未清扫区域的状态的图。终端装置160也可以具备将未清扫信息叠加于所接收到的楼层地图上来进行显示的显示单元161和显示控制部(未图示)。
63.另外,也可以是,终端装置160具备受理部,该受理部根据使用者对显示单元161所显示的未清扫区域的触摸等来受理在对规定的区域的清扫结束之后是否进行清扫的输入,终端装置160将所受理的受理信息发送到清扫机130。也可以是,获取到受理信息的清扫控制部174按照受理信息来执行对未清扫区域300的清扫。
64.产业上的可利用性
65.本公开能够利用于自主地行走来对规定的区域进行清扫的清扫机。
66.附图标记说明
67.130:清扫机;131:主体;132:移动单元;133:抽吸部件;134:清扫单元;136:位置信息获取单元;138:吸入口;139:保险杠;140:轮子;141:壳体;142:脚轮;143:尘埃保持部;146:旋转刷;147:刷驱动马达;148:环境声音获取单元;160:终端装置;161:显示单元;170:控制装置;171:动作检测部;172:生物体判定部;173:移动控制部;174:清扫控制部;175:区域设定部;176:声音判定部;200:生物体障碍物;201:第一距离;210:非生物体障碍物;300:未清扫区域。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1