自动炒菜机的制作方法
1.本实用新型涉及一种自动炒菜机。
背景技术:
2.现有的自动炒菜机在炒菜过程中,对锅体内食材进行搅拌主要采用上置搅拌棒搅拌、下置搅拌器搅拌以及锅体旋转这三种结构形式;对锅体的加热则采用加热盘、加热膜和电磁加热等方式。
3.这样一来,会遇到两个问题:一、现有的自动炒菜机结构中发热部分恒定不动,需要采用搅拌杆或者锅体旋转来实现食材转动,但由于部分食材具有黏性,在搅拌或者旋转过程中会贴在锅内一直加热,导致烧焦;二、在烹饪需要翻面的食材,特别是煎鱼时,搅拌杆和锅体旋转均无法解决食材贴在锅上导致烧焦的问题。
技术实现要素:
4.本实用新型要解决的技术问题是为了克服现有技术中自动炒菜机在烹饪时食材容易黏在锅底导致烧焦的缺陷,提供一种自动炒菜机。
5.本实用新型是通过下述技术方案来解决上述技术问题:
6.一种自动炒菜机,所述自动炒菜机包括锅体,所述自动炒菜机还包括移动驱动部,所述移动驱动部驱动所述锅体在第一加热位置和第二加热位置之间切换,所述锅体内设有突出于所述锅体表面的阻挡部,所述阻挡部设置于所述锅体位于所述第一加热位置时的最低点和所述锅体位于所述第二加热位置时的最低点之间。
7.在本方案中,通过在锅体内设置阻挡部,设置移动驱动部驱动锅体在第一加热位置和第二加热位置之间切换,锅体在切换位置过程中,锅体内的食材在阻挡部的阻挡作用下实现翻面,避免食材因过度加热黏在锅底导致烧焦。
8.较佳地,所述锅体具有对称回转轴,当所述锅体位于所述第一加热位置或所述第二加热位置时,所述对称回转轴和竖直方向的夹角介于10
°‑
60
°
之间。
9.在本方案中,锅体位于第一加热位置和第二加热位置时,锅体的对称回转轴和竖直方向之间的夹角介于10
°‑
60
°
,如此设置,避免锅体在加热位置过度倾斜,避免加热时锅体内的食材从锅口洒出。
10.较佳地,所述阻挡部设置于所述锅体底部中心处。
11.在本方案中,通过即将阻挡部设置于锅底底部中心处,使得每次锅体在第一加热位置和第二加热位置之间切换时,食材都能够碰到阻挡部,提高锅体在位置切换过程中的食材翻面的成功率。
12.较佳地,所述移动驱动部用于向所述锅体提供冲击性载荷,在所述冲击性载荷的作用下所述锅体在所述第一加热位置和所述第二加热位置之间切换。
13.在本方案中,通过向锅体施加冲击性载荷,使得锅体在切换位置的过程中,食材均能够跃起从而与阻挡部相接触以实现食材的翻面,提高食材翻面的成功率。
14.较佳地,所述移动驱动部包括第一冲击部和第二冲击部,当所述锅体位于所述第一加热位置时,所述第二冲击部用于向所述锅体提供冲击性载荷以使所述锅体向所述第二加热位置移动;当所述锅体位于所述第二加热位置时,所述第一冲击部用于向所述锅体提供冲击性载荷以使所述锅体向所述第一加热位置移动。
15.在本方案中,分别设置第一冲击部和第二冲击部分别向锅体位于第一加热位置和第二加热位置时提供冲击性载荷,使锅体在变换位置时锅内的食材均能够实现翻面,使食材在烹饪过程中受热更均匀。
16.较佳地,所述第一冲击部和所述第二冲击部均为冲击锤。
17.在本方案中,通过设置冲击锤给锅体提供冲击性载荷,冲击锤的结构简单,能够给锅体稳定可靠地提供冲击性载荷,提高自动炒菜机的运行可靠性。
18.较佳地,所述冲击锤为电磁驱动。
19.在本方案中,通过设置冲击锤为电磁驱动,电磁驱动的冲击锤能够在需要使用时极短时间内通电并输出冲击性载荷,且结构简单无需额外的气路或液压管路,简化了自动炒菜机的结构。
20.较佳地,所述自动炒菜机还具有加热部,所述锅体能够相对于所述加热部实现一第一运动,所述第一运动不同于所述锅体在所述第一加热位置和所述第二加热位置之间切换的运动。
21.在本方案中,锅体相对加热部做第一运动,锅体内的食材也相对锅体发生移动,使得烹饪过程中锅内的食材能够相对锅体移动,提高食材加热的均匀程度。
22.较佳地,所述第一运动为旋转运动。
23.在本方案中,第一运动设置为旋转运动,锅体在旋转运动过程中,锅内的食材也能够随之翻动,锅体在旋转过程中起到类似于翻炒食材的效果,使各类调料与食材之间混合更充分。
24.较佳地,所述锅体具有对称回转轴,所述第一运动的旋转轴线为所述对称回转轴。
25.在本方案中,锅体绕对称回转轴回转实现锅内食材的均匀加热,且绕对称回转轴回转使锅体相对于固定架的相对位置不会发生改变,避免因第一运动导致锅体和固定架之间发生干涉。
26.较佳地,所述加热部的覆盖区域小于所述锅体的受热区域。
27.在本方案中,通过将加热部的覆盖区域设置为小于锅体的受热区域,从而锅体在旋转过程中,不同位置的锅体能够分别受热,避免单区域锅体的温度过高导致食材烧焦。
28.较佳地,所述自动炒菜机还包括固定座,所述加热部安装于所述固定座上,所述锅体活动连接于所述固定座。
29.在本方案中,通过设置将加热部设置在固定座上,锅体活动连接于固定座并且可相对固定座移动,实现锅体相对加热部转动以加热锅体的不同区域,使锅体不同位置受热更加均匀,避免锅体局部温度过高导致食材烧焦。
30.较佳地,所述自动炒菜机还包括第一回转驱动部和第二回转驱动部,当所述锅体位于所述第一加热位置时在所述第一回转驱动部的驱动下进行第一运动,同时和所述第二回转驱动部脱离;当所述锅体位于所述第二加热位置时在所述第二回转驱动部的驱动下进行第一运动,同时和所述第一回转驱动部脱离。
31.在本方案中,通过分别设置第一回转驱动部和第二回转驱动部,使锅体在第一加热位置和第二加热位置均能够旋转运动,使锅内食材受热更加均匀。
32.较佳地,所述锅体底部设有突出轴,所述第一回转驱动部和所述第二回转驱动部上分别设有轴套,所述锅体通过所述突出轴和所述轴套连接。
33.在本方案中,通过在锅底设置突出轴,第一回转驱动部和第二回转驱动部和锅体之间通过轴套和突出轴相连,确保能稳定驱动锅体绕对称回转轴回转。
34.本实用新型的积极进步效果在于:
35.本实用新型的自动炒菜机,通过在锅体内设置阻挡部,设置移动驱动部驱动锅体在第一加热位置和第二加热位置之间切换,锅体在切换位置过程中,锅体内的食材在阻挡部的阻挡作用下实现翻面,避免食材因过度加热黏在锅底导致烧焦。
附图说明
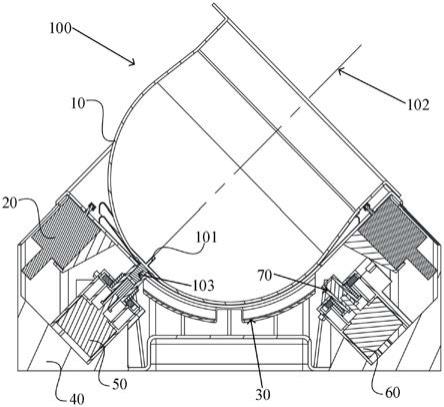
36.图1为本实用新型的自动炒菜机的结构示意图。
37.图2为本实用新型的自动炒菜机做第一运动后的示意图。
38.图3为本实用新型的自动炒菜机的锅体位于第一加热位置的示意图。
39.图4为本实用新型的自动炒菜机的锅体位于第二加热位置的示意图。
40.图5为图3中自动炒菜机的锅体位于第一加热位置时第一回转驱动部和突出轴连接的局部放大图。
41.图6为图3中自动炒菜机的锅体位于第一加热位置时第二回转驱动部和锅体脱离连接的局部放大图。
42.附图标记说明:
43.自动炒菜机100
44.锅体10
45.阻挡部101
46.对称回转轴102
47.突出轴103
48.移动驱动部20
49.第一冲击部201
50.第二冲击部202
51.加热部30
52.固定座40
53.第一回转驱动部50
54.第二回转驱动部60
55.轴套70
56.食材80
具体实施方式
57.下面通过实施例的方式进一步说明本实用新型,但并不因此将本实用新型限制在实施例的范围之中。
58.如图3和图4所示,本实用新型提供了一种自动炒菜机100。自动炒菜机100包括锅体10,锅体10内有圆球形腔体用于容纳食材80。锅体10的底部为圆球形,锅体10的顶部为圆环形。自动炒菜机100还包括移动驱动部20,移动驱动部20抵靠于锅体10的圆环形部位,移动驱动部20在控制下向锅体10提供驱动力,以驱动锅体10在第一加热位置和第二加热位置之间切换。如图3所示锅体10处于第一加热位置,如图4所示的锅体10处于第二加热位置。锅体10内设有突出于锅体10表面的阻挡部101,阻挡部101自锅体10底部向锅体10内的圆球形腔突出。如图3所示,锅体10处于第一加热位置时,锅体10对板状食材80的b面进行加热,加热过程保证锅体10稳定不动的状态或小范围左右晃动,实现对板状食材80的b面单面煎,当b面煎好后,移动驱动部20驱动锅体10向第二加热位置切换,在锅体10切换位置的过程中,锅内的食材80由于惯性作用被抛起,同时在抛起的过程中受到阻挡部101的阻碍而翻转,从而当锅体10切换至第二加热位置后,食材80的a面与锅体10接触受热,从而实现对食材80的a面的煎烤。为了确保食材80在抛起的过程中能够触碰到阻挡部101,阻挡部101设置于锅体10位于第一加热位置时的最低点和锅体10位于第二加热位置时的最低点之间,从而保证在锅体10切换位置的过程中食材80能够碰到阻挡部101从而实现翻面。
59.如图1所示,锅体10具有对称回转轴102,对称回转轴102不是一根实体的轴而是一根空间概念上的轴,对称回转轴102即锅体10的对称轴,锅体10绕对称回转轴102对称。为了防止锅内的食材80在烹饪过程中从锅体10内洒出,当锅体10位于第一加热位置或第二加热位置时,对称回转轴102和竖直方向的夹角介于10
°‑
60
°
之间。优选的,本实施例的锅体10位于第一加热位置或第二加热位置时,对称回转轴102和竖直方向之间的夹角为45
°
,设置为45
°
能够防止因倾角过小导致锅体10在第一加热位置和第二加热位置之间切换时位置变换程度过小,致使食材80翻面的成功率降低;也能够避免因倾角过大导致锅体10在第一加热位置和第二加热位置之间切换时移动过于剧烈导致锅体10内的食材80洒出。
60.在本实施例中,对称回转轴102和竖直方向之间的夹角介于10
°‑
60
°
之间。在其他实施例中,该夹角也可以小于10
°
或稍稍大于60
°
,但该夹角也不能过于靠近0
°
,以防锅体10在切换位置时因位置变化过小食材10无法翻面。该夹角也可以稍稍大于60
°
,例如可以为65
°
或70
°
等,但不能过大,例如不能为接近90
°
的角度,若该角度接近90
°
,容易出现锅体10切换位置后食材80因惯性从锅体10内飞出。
61.在本实施例中,阻挡部101设置于锅体10底部中心处,即对称回转轴102和锅体10相交处。阻挡部101为自锅体10底部向锅体10内球形腔突起的杆状物体,阻挡部101设置于锅体10底部中心处能够提高食材80在抛起的过程中在阻挡部101阻碍作用下翻面的成功率,锅体10每次在第一加热位置和第二加热位置之间切换时,食材80尽可能地能够碰到阻挡部101,从而实现食材80的翻面。在其他实施例中,阻挡部101也可以不设置于锅体10底部的中心处,可以稍稍偏离于锅体10的底部中心,只要阻挡部101设置于锅体10位于第一加热位置时的最低点(即图3所示锅体10处于第一加热位置时锅体10竖直方向的最低点)和锅体10位于第二加热位置时的最低点(即图4所示锅体10处于第二加热位置时锅体10竖直方向的最低点)之间即可。
62.移动驱动部20用于向锅体10提供冲击性载荷,在冲击性载荷的作用下锅体10在第一加热位置和第二加热位置之间切换。在本实施例中,冲击性载荷指的是载荷的加速度是阶跃变化的,而移动驱动部20如何将冲击性载荷加给锅体10的并不做限制。冲击性载荷的
施加形式不限于对锅体10的推动、拉动或是其他的方式。在其他实施例中,移动驱动部20向锅体10施加的载荷也可以不是冲击性载荷,即移动驱动部20施加给锅体10的载荷的不是阶跃变化也可以,只要载荷驱动锅体10切换位置时能使锅体10内部的食材80被抛起即可。
63.如图2所示,在本实施例中,移动驱动部20包括第一冲击部201和第二冲击部202。第二冲击部202用于向锅体10提供冲击性载荷以使锅体10向第二加热位置移动。当锅体10位于第一加热位置时,第二冲击部202抵靠于锅体10的右侧壁。自动炒菜机100的控制系统没有向第二冲击部202发送冲击信号时,第二冲击部202仅仅抵靠于锅体10而不动作;当自动炒菜机100的控制系统判断需要将锅体10自第一加热位置切换至第二加热位置时,控制系统向第二冲击部202发送动作信号,第二冲击部202接收到动作信号后给锅体10提供加速度阶跃变化的冲击性载荷,锅体10摆动至如图4所示的第二加热位置。当锅体10位于第二加热位置时,第一冲击部201用于向锅体10提供冲击性载荷以使锅体10向第一加热位置移动。当锅体10位于第二加热位置时,第一冲击部201抵靠于锅体10的左侧壁。自动炒菜机100的控制系统没有向第一冲击部201发送冲击信号时,第一冲击部201仅仅抵靠于锅体10而不动作;当自动炒菜机100的控制系统判断需要将锅体10自第二加热位置切换至第一加热位置时,控制系统向第一冲击部201发送动作信号,第一冲击部201接收到动作信号后给锅体10提供加速度阶跃变化的冲击性载荷,锅体10摆动至如图3所示的第一加热位置,锅体10在摆动过程中锅内的食材80首先由于惯性作用被抛起,随后食材80在阻挡部101的阻碍作用下会翻面并落在锅体10内。
64.在其他实施例中,移动驱动部20也可以设有一个第一冲击部201而不设有第二冲击部202,采用第一冲击部201锅体10自第一加热位置推向第二加热位置,在第一冲击部201设置磁吸装置将锅体10自第二加热位置吸回第一加热位置。
65.如图3所示,第一冲击部201和第二冲击部202均为冲击锤,且冲击锤为电磁驱动。当锅体10位于第一加热位置时,第二冲击部202的冲击锤的锤头抵靠于锅体10的右侧壁,当第二冲击部202收到来自自动炒菜机100的控制系统的信号后,第二冲击部202内的电磁线圈迅速充能并驱动冲击锤向锅体10输出一个瞬时力f,瞬时力f与竖直方向的夹角β介于-60
°
至90
°
之间,本实施例中优选夹角β=5
°
。第二冲击部202和第一冲击部201的结构相同,在此不做过多赘述。二者的区别仅在于第二冲击部202和第一冲击部201设置的位置不同,第一冲击部201设置于锅体10位于第二加热位置时抵靠于锅体10的左侧壁。在其他实施例中,第一冲击部201或第二冲击部202也可以为电磁铁和永磁体组合的形式实现,将永磁体安装于锅体10的侧壁上,需要推动锅体10时,给电磁铁通电,并根据磁铁之间异性相斥的远离推动锅体10在第一加热位置和第二加热位置之间切换。在其他实施例中,也可以采用气缸推动或液压等动力源推动锅体10。
66.自动炒菜机100还具有加热部30,加热部30设置于锅体10处于第一加热位置或第二加热位置时竖直方向的下部。锅体10能够相对于加热部30实现一第一运动,第一运动不同于锅体10在第一加热位置和第二加热位置之间切换的运动。锅体10上和加热部30相对的区域为受热区域,锅体10相对于加热部30运动从而改变锅体10上和加热部30相对的受热区域,从而使提高锅体10上各个区域受热的均匀程度,提高烹饪效果。
67.如图2所示,第一运动为旋转运动,锅体10能够旋转,以改变加热部30相对的锅体10的受热区域,提高锅体10各个区域受热的均匀程度,并且在旋转的过程中,黏在锅底的食
材80可以因旋转被带至较高的位置,且在重力作用下能够自然下落,避免长时间黏在锅底加热导致食材80烧焦。
68.锅体10具有对称回转轴102,在本实施例中,第一运动的旋转轴线为对称回转轴102,旋转运动的回转轴线为锅体10的对称回转轴102,从而锅体10在旋转时不会产生沿锅体10直径方向(即垂直于锅体10的对称回转轴102方向)的横向运动。在其他实施例中,第一运动的旋转轴线也可以不是对称回转轴102,即锅体10的自转的回转轴不是对称回转轴102而是其他轴线,只要锅体10转动时不会和自动炒菜机100其他部分干涉以及可以实现锅体10内的食材80翻滚搅拌即可。
69.加热部30的覆盖区域小于锅体10的受热区域,加热部30的覆盖区域为加热部30与锅体10相对的能够加热锅体10的面积。加热部30设置于锅体10沿竖直方向的底部,加热部30仅能对锅体10沿竖直方向的底部的一块区域进行加热。锅体10在进行第一运动绕对称回转轴102回转时,在回转前已经被加热部30加热的区域随着锅体10的自转远离加热部30,之前未被加热的区域随着锅体10的自转转至和加热部30相对并被加热部30加热。随着锅体10绕对称回转轴102的自转,锅体10上各个区域都能够被加热部30加热,提高锅体10各部分加热的均匀性,避免锅体10上部分区域温度过高,导致锅体10内某部分食材80被烧焦的情况。
70.自动炒菜机100还包括固定座40,固定座40用于固定安装自动炒菜机100上各个部分,固定座40本身固定安装于操作台的台面上。加热部30安装于固定座40上,加热部30固定安装于固定座40的中间处,并与锅体10的底部相对,且加热部30距离锅体10的距离不可过远以避免加热部30对锅体10的加热效果太差甚至无法加热锅体10。锅体10活动连接于固定座40,锅体10整体活动连接于固定座40,且锅体10安装于固定座40上后锅体10能够在第一加热位置和第二加热位置之间切换,同时锅体10位于第一加热位置或第二加热位置时锅体10能够绕对称回转轴102自转。
71.在本实施例中,自动炒菜机100还包括第一回转驱动部50和第二回转驱动部60,第一回转驱动部50和第二回转驱动部60均具有驱动电机,驱动电机用于驱动锅体10绕对称回转轴102回转。如图5所示,当锅体10位于第一加热位置时,锅体10在第一回转驱动部50的驱动下进行第一运动,如图6所示,此时锅体10和第二回转驱动部60之间并无连接。与此相对,如图4所示,当锅体10位于第二加热位置时,锅体10在第二回转驱动部60的驱动下进行第一运动,此时锅体10和第一回转驱动部50之间并无连接。第一回转驱动部50或第二回转驱动部60与锅体10连接时,第一回转驱动部50或第二回转驱动部60的驱动电机输出轴和锅体10表面的切面垂直连接,电机输出轴和锅体10表面垂直连接从而驱动锅体10旋转时,锅体10的旋转仅有绕电机输出轴旋转运动而不会有绕其他轴的旋转运动,在保证锅体10转动的同时简化了锅体10转动运动,提高锅体10在旋转时的稳定性。
72.在其他实施例中,自动炒菜机100也可以只设有一个第一回转驱动部50或第二回转驱动部60。
73.在本实施例中,锅体10底部设有突出轴103,突出轴103自锅体10的底部沿对称回转轴102的方向向远离于锅体10的方向伸出。第一回转驱动部50和第二回转驱动部60上分别设有轴套70,锅体10通过突出轴103和轴套70连接。轴套70的内表面和突出轴103配合连接,在本实施例中,突出轴103为正六面体轴,突出轴103的侧面数量越多能够降低轴套70和突出轴103配合时的难度。
74.在其他实施例中,也可以在锅体10的底部设置凹槽,第一回转驱动部50和第二回转驱动部60上分别设有突出的转动轴并用于伸入锅体10底部的凹槽中,转动轴和凹槽相配合驱动锅体10转动。
75.虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本实用新型的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本实用新型的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1