一种二合一清洁装置的制作方法
1.本实用新型涉及清洁机器人领域。
背景技术:
2.清洁机器人是一种可自动行走对地面进行吸尘、扫地、洗地等地面工作的自动设备。清洁机器人的自动清洁过程的方式具有两种:一种是根据清洁区域面积提前进行路径规划,按路径对地面进行清洁;另一种是随机行走,清洁机器人配合感应器自动回避障碍物并按自身的清扫逻辑拐弯进行下一路径的清扫,逐步完成清洁区域的清洁。
3.但在日常工作中,由于家中地面经常随机摆放物品,清洁机器人会自动避让导致经常出现局部未清洁的区域,以及还会有局部比较脏的区域,需在重复执行一遍或多遍自动清洁过程后才能将清洁区域完全清洁;如果人为挪动或转移该清洁机器人到人为指定位置,让清洁机器人即刻清扫此位置的脏污,按照目前市面上清洁机器人的清扫逻辑很难实现。
技术实现要素:
4.为了克服现有技术的不足,本实用新型提供一种二合一清洁装置。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种二合一清洁装置,包括可自行走清洁的清洁机器人以及可拆手柄,可拆手柄包括安装座以及端部铰接在安装座上的操作杆,所述清洁机器人顶部设有连接座,连接座上设有切换控制部件,所述安装座通过手拆式结构与所述连接座连接,并由安装座上的触发元件触发切换控制部件,所述切换控制部件可实现清洁机器人自动模式和手动模式的切换。
7.所述手拆式结构包括对应吸合的两组强磁铁组件,并分别设置在安装座以及连接座上。
8.所述清洁机器人顶部表面设有敞口并设有装饰盖板盖合该敞口,敞口内设有安装支架形成所述连接座,所述手拆式结构设置在安装支架上。
9.所述敞口与所述安装座外围轮廓贴合。
10.所述安装座包括安装底板、位于安装底板顶部的铰接座以及与所述操作杆固装的铰接头。
11.所述操作杆上设有控制按键,所述安装座上设有控制按键接线端,所述连接座设有与控制按键接线端对接的电路接线端,使控制按键与清洁机器人内的控制电路电连接。
12.所述切换控制部件为霍尔开关,所述安装座上设有感应磁铁触发所述霍尔开关。
13.所述清洁机器人包括设有自行走机构的机身,机身底部设有吸尘部件和擦地部件。
14.所述吸尘部件包括设置在机身底部与垃圾箱连通的吸尘口以及布置在吸尘口内自转动的扫地滚刷,所述垃圾箱设置在机身内并与抽吸风机连通。
15.所述擦地部件包括设置在机身底部的滚筒槽以及布置在滚筒槽内自转动的擦地滚筒,滚筒槽侧壁设有刮条以及吸污口,所述刮条边缘与所述擦地滚筒摩擦接触,机身内设有抽吸泵,吸污口连通抽吸泵产生吸力将刮条刮下的脏污吸走。
16.本实用新型的有益效果是:本实用新型可通过将可拆手柄组装在清洁机器人上,触发清洁机器人切换至手动模式,关闭自行走功能,使其变化为手持式清洁机,用户可把持手柄移动清洁机器人对需要深度清洁的区域进行重点清洁;卸下可拆手柄后,清洁机器人恢复自动模式,依旧继续自行走清洁,实现一机两用,大大提升清洁效果和清洁体验;另一方面,可拆手柄的安装座与清洁机器人之间通过手拆式结构连接,无需采用工具进行紧固,实现可拆手柄与清洁机器人的快速拆装。
附图说明
17.下面结合附图和实施例对本实用新型进一步说明。
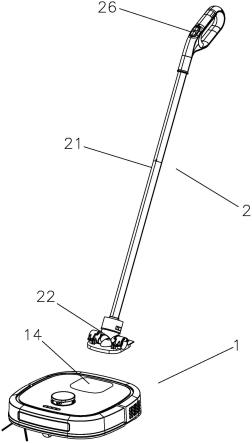
18.图1是本实用新型清洁机器人和可拆手柄的结构示意图;
19.图2是本实用新型连接座的拆分示意图;
20.图3是本实用新型安装座的拆分示意;
21.图4是清洁机器人和可拆手柄组装后的结构示意图
22.图5是清洁机器人的结构示意图;
23.图6是清洁机器人的剖视图;
24.图7是图6的a处放大图。
具体实施方式
25.参照图1至图4的一种二合一清洁装置,包括可自行走清洁的清洁机器人1以及可拆手柄2,可拆手柄2包括安装座22以及端部铰接在安装座22上的操作杆21,清洁机器人1顶部设有连接座3,连接座3上设有切换控制部件4,安装座22通过手拆式结构9与连接座3连接,手拆式结构9可以为:活动卡扣结构或磁吸结构等无需工具即可实现连接的安装结构,以方便安装座22与连接座3实现快速拆装,安装座22上设有触发元件触发切换控制部件4,切换控制部件4可采用霍尔开关,霍尔开关与清洁机器人1的控制电路电连接,安装座22上设有感应磁铁27作为触发元件,当安装座22与连接座3组合使可拆手柄2与清洁机器人1实现组装,感应磁铁27触发霍尔开关闭合产生电信号传输给控制电路,令清洁机器人1切换至手动模式,关闭自行走功能,使其变化为手持式清洁机,用户可把持手柄移动清洁机器人1对需要深度清洁的区域进行重点清洁;卸下可拆手柄2后,清洁机器人1恢复自动模式,依旧继续自行走清洁,实现一机两用,大大提升清洁效果和清洁体验。
26.本实施例中,手拆式结构9采用磁吸结构,包括对应吸合的两组强磁铁组件91,分别设置在安装座22以及连接座3上,利用磁性吸合的原理,使安装座22与连接座3之间无需布置过多的结构,只需保持安装座22与连接座3所接触的表面相对平整,令两组强磁铁组件91可平行贴合即可,可大大简化设计以及加工制造的工序,节省制作成本。采用两组强磁铁组件91相对吸合,两者之间的吸合力强,可保证安装座22和连接座3稳定连接。为了进一步使安装座22和连接座3之间的连接更加紧固,清洁机器人1顶部表面设有敞口13,敞口13内设有安装支架并设有手拆式结构9形成连接座3,安装座22嵌装进入敞口13内连接座3相连;
敞口13与安装座22外围轮廓贴合,通过敞口13对安装座22实现良好的平移方向限位作用,有利于用户手持可拆手柄2推动机器人移动实现手动清洁;卸下手柄后,敞口13还配备有装饰盖板14,盖合该敞口13挡水挡尘,且避免敞口13影响清洁机器人1的外观一致性。
27.作为优选,安装座22包括安装底板23、位于安装底板23顶部的铰接座24以及与操作杆21固装的铰接头25,结构简单且有利于进行手拆式结构9的加工布置。操作杆21上设有控制按键26,安装座22上设有控制按键接线端28,连接座3设有与控制按键接线端28对接的电路接线端31,安装头与连接座3组合时,控制按键接线端28插入电路接线端31,使操作杆21上的控制按键26与清洁机器人1内的控制电路电连接。
28.如图5至图7所示的清洁机器人,包括设有自行走机构12的机身11,以及设置在机身11底部实现地面清洁的吸尘部件5和擦地部件6。吸尘部件5包括设置在机身11底部与垃圾箱51连通的吸尘口52以及布置在吸尘口52内自转动的扫地滚刷53,垃圾箱51设置在机身11内并与抽吸风机54连通,驱动扫地滚刷53的滚刷马达设置在垃圾箱51旁,抽吸风机54对垃圾箱51内进行抽风排气,使吸尘口52产生吸力,同时通过扫地滚刷53转动扬起地面的灰尘以及将垃圾卷起,由吸尘口52吸入垃圾箱51内,实现清洁机器人1的吸尘功能。擦地部件6包括设置在机身11底部的滚筒槽61以及布置在滚筒槽61内自转动的擦地滚筒62,滚筒槽61侧壁设有刮条63以及吸污口64,清洁机器人1还设有喷水部件73对擦地滚筒62进行湿润,擦地滚筒62由滚筒马达带动对地面的脏污进行旋转擦拭清洁,实现清洁机器人1的擦地功能,本实施例中的清洁机器人1,还可将擦地部件6形成的脏水回收,刮条63边缘与所述擦地滚筒62摩擦接触,机身11内设有抽吸泵65,吸污口64连通抽吸泵65产生吸力将刮条63刮下的脏污吸走,进入清洁机器人1内暂时存储。
29.自动模式下,吸尘部件5、擦地部件6同时启动,并在清洁机器人1设定好的逻辑下,由自行走机构12带动;吸尘部件5位于机身11中部,根据清洁机器人1的前进方向,擦地部件6位于吸尘部件5后方,实现清洁机器人1先扫地后擦地的清洁工作,符合家庭常规的清洁方式。
30.当用户想自行进行局部地面的清洁时,将可拆手柄2组装在清洁机器人1上,触发清洁机器人1切换至手动模式,此时,清洁机器人1停止自行走机构12关闭自行走功能,吸尘部件5、擦地部件6暂停工作,通过操作杆21上的控制按键26选择启动吸尘功能或擦地功能或同时开启,根据用户需求选择启动吸尘功能和擦地功能配合实现手动清洁。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1