一种可拆卸的水箱及清洁机器人的制作方法
1.本实用新型涉及清洁机器人技术,特别是一种可拆卸水箱的清洁机器人。
背景技术:
2.随着机器人相关技术的发展,特别是自主导航移动技术的日趋成熟,越来越多的机器人被广泛应用在各行各业,比如具备自主移动的清洁机器人,用于对地面的清洁。
3.清洁机器人根据被清洁垃圾的不同,分为扫地机器人、洗地机器人,扫洗一体机器人等。扫地机器人一般是针对干垃圾(如纸屑、毛发、沙子等)进行清洁,洗地机器人一般是针对湿垃圾(油污、汤汁、污渍等)进行清洁,扫洗一体机器人就结合了扫地机器人和洗地机器人的特点,既可以清洁干垃圾也可以清洁湿垃圾,是目前和未来的一个发展方向。
4.传统的扫地机器人由于针对的是干垃圾,是不需要设计水箱的,而洗地机器人和扫洗一体机器人由于都需要清洁湿垃圾,且湿垃圾清洁后容易在地面留下污渍,如果清洁过程中没有水辅助,是很难清洁干净的,甚至,为了达到更好的清洁效果以及提高机器人的自动化程度,机器人需要利用水对清洁模块定时或实时进行自清洁,所以这两种机器人必须要有可容纳水的水箱。
5.目前市面上常见清洁机器人的有以下三种做法:
6.1.把水箱设计在基站端,机器人定时返回基站对拖布进行润湿或清洁,采取这种方案的一般是家用扫洗一体机器人,由于家用机体积的限制,无法在机器人本体上设计水箱。
7.2.由于家用机体积的限制,有些厂商在机器人本体端设计了一个很小的水箱,这种方案只能对拖布进行润湿,水箱的水不足以清洁拖布,需要人为清洁拖布,同时清洁面积小。
8.3.把水箱设计在机器人本体端,这种方案主要针对的是商用清洁机器人,因为商用清洁机器人对体积的要求并不是太严格,目前市场上的商用清洁机器人出于低成本考虑,常常把水箱和机身做成一体,这样做法虽然结构简单,成本低,但是体验不好,因为机器人常常需要补给清水以及排放污水,这就需要把整个机器人移动到补水点或排污点,非常不方便。
9.因此,针对这种情况,本实用新型提供一种可拆卸的水箱及清洁机器人,可拆卸的水箱,包括清水箱和污水箱,左右对称布置于机器人的后方,底盘之上;清水箱,用于储存供清洁地面和清洁滚刷的清水,污水箱,用于储存清洁地面和清洁滚刷后被抽吸上来的污水和固体垃圾,当清洁机器人需要补清水或者排污水的时候,可以单独拆卸清水箱或污水箱进行补清水或排污水操作,不需要把整机移动到补水点或排污点,水箱的拆卸和安装过程简单易用,方便快捷,用户体验良好。
技术实现要素:
10.本实用新型的技术方案如下:
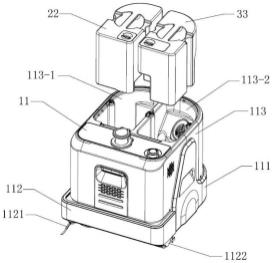
11.本实用新型涉及的一种可拆卸的水箱及清洁机器人,清洁机器人主要包含机器人本体11、清水箱22和污水箱33。其中,机器人本体11主要由底盘111、清洁模块112、机器人机身 113等组成。
12.其中,底盘111提供清洁机器人自主移动的能力,清洁模块112布置于底盘的前方,主要包含边刷1121和滚刷1122,具有清洁地面干垃圾和湿垃圾的功能。
13.其中,机器人机身113具有可容纳清水箱22和污水箱33的容纳空间,分清水箱容纳仓113-1和污水箱容纳仓113-2,两容纳仓左右并列对称布置于机身的后方,并且开口朝上。
14.其中,清水箱容纳仓113-1底部具有入水接口113-1a和出水接口113-1b结构特征,入水接口113-1a用于与清水箱的出水阀223相接,出水接口113-1b与出水管(图中未标出) 相接,使得清水箱22与机器人机身113实现管路相通,保证清水箱22中的水可以被抽到清洁模块112处,供地面或滚刷的清洁使用。
15.其中,污水箱容纳仓113-2,前下方设置有一抽吸接口113-2a,抽吸接口113-2a外圈包裹着第一密封件1131,后下方设置有一排气接口113-2b,排气接口113-2b外圈包裹着第二密封件1132,密封件为软性材质,如硅橡胶、tpu、tpe等,第一密封件1131和第二密封件1132都具有“喇叭”形的边沿。
16.清水箱22,由清水箱本体221、清水箱盖222、出水阀223、出水阀固定件224组成。
17.清水箱本体221,具有一个由塑胶围成的腔体,腔体在顶部中间位置形成一个把手结构特征221a,方便清水箱的拆卸与安装;清水箱本体221的前方顶部开设有一开口221b,开口221b为清水的入口,使用一清水箱盖222密封,清水箱盖222,为软胶材质,如硅橡胶、tpu、tpe等;清水箱本体221的前方底部开设有一开口221c,开口处安装有出水阀 223,通出水阀固定件224进行固定和密封。
18.出水阀223,由出水阀本体2231、出水阀盖2232、阀芯2233、弹簧2234组成。出水阀223上有入水口223a和出水口223b,在正常状态下,阀芯2233在弹簧2234的弹力作用下使得阀芯2233堵住出水口223a,此时出水阀223为闭合状态,水流无法通过,特别地,为了提高闭合效果,阀芯2233靠近出水口223a侧设计了一层软胶2233-1,在弹簧的弹力作用下软胶2233-1被一定程度的挤压,提高了软胶2233-1和出水口223a之间的密封效果。保证清水箱22在取出后,补水的过程中不发生漏水现象。
19.污水箱33,由污水箱本体331、污水箱盖332、固液分离器333、水汽过滤器334组成。
20.污水箱本体331,具有一个由塑胶围成的腔体,腔体在顶部中间位置形成一个把手结构特征331a,方便污水箱的拆卸与安装;腔体的前方设置有一抽吸管道331b,抽吸管道 331b为污水箱33的原身特征,抽吸管道331b的露在腔体外侧的一端为第一抽吸入口331b
‑ꢀ
1,延伸在腔体内部的另一端为第二抽吸入口331b-2;腔体的后方设置有一排气管道331c,排气管道331c为污水箱本体331的原身特征,排气管道331c的露在腔体外侧的一端为第一排气出口331c-1,延伸在腔体内部的另一端为第二排气入口331c-2;
21.污水箱本体331的顶部开设有一开口331d,开口331d下在设置有固液分离器333,固液分离器333为一方形的塑胶过滤器,固液分离器333的上方设计有入口管道333a,入口管道 333a为固液分离器333的原身特征,入口管道333a的露在固液分离器外侧的一端为第一入口333a-1,延伸在固液分离器内部的另一端为第二入口333a-2;固液分离器333的下方设计有用于过滤大颗粒垃圾的过滤孔333b,固液分离器333的入口管道333a与污水箱本体
331 的抽吸管道331b同轴安装放置,使得固液分离器333的入口管道333a的第二入口333a-2 对齐污水箱本体331的抽吸管道331b的第二抽吸入口331b-2。
22.污水箱盖332,为软胶材质,如硅橡胶、tpu、tpe等,安装带污水箱本体331的顶部的开口处331d,由于采用软胶材质,一方面可以对开口处进行密封,一方面可以方便拆卸和安装,便于取出固液分离器333,实现大颗粒固体垃圾和污水的分类排污。
23.水汽过滤器334,为一过滤棉,放置在污水箱本体331的排气管道331c第一排气出口331c-1和第二排气车出口331c-2之间,具有过滤水汽的作用,防止水汽进入风机(图中未标出),
24.当清水箱22安装到机器人机身11的清水箱容纳仓113-1时,清水箱容纳仓113-1的入水接口113-1a内有一凸台结构特征t,凸台结构特征t把阀芯2233往上顶开,出水口223b被打开,此时清水箱内的水可以流出来。
25.当污水箱33安装到机器人机身11的污水箱容纳仓113-2后,第一密封件1131和第二密封件1132“喇叭”形的边沿被挤压,使得第一密封件1131与污水箱本体331的第一抽吸入口331b-1的外围、第二密封件1132与污水箱本体331的第一排气出口331c-1的外围实现密封,保证污水箱33内部腔体的气密性。
26.为了避免清水箱22和污水箱33在清洁机器人工作过程发生晃动,在机器人机身113 上方设置压紧装置1133,压紧装置1133由压紧件11331、弹簧11332、螺栓11333组成,分 3组分别布置在清水箱容纳仓113-1和污水箱容纳仓113-2中间的边缘。压紧件11331在弹簧11332作用下压紧水箱,同时压紧件11331可以绕着螺栓11333的轴线转动,通过转动压紧件11331可以使得水箱处于压紧状态或松开状态,压紧机构简单,效果好,使用方便,同时提高清水箱22和污水箱33的拆卸与安装的便利性。
27.本实用新型技术方案的详细阐述
28.本实用新型技术方案具体如下:
29.本实用新型涉及的一种可拆卸的水箱及清洁机器人,其整体结构示意图如附图1所示。工作原理如下:
30.本实用新型提供的一种可拆卸的水箱及清洁机器人,可拆卸的水箱,包括清水箱和污水箱,左右并列对称布置于清洁机器人机身的后方且底盘之上;清水箱,用于储存供清洁地面和清洁滚刷的清水,污水箱,用于储存清洁地面和清洁滚刷后被抽吸上来的污水和固体垃圾,当机器人在清洁作业时,清水箱的水被抽到滚刷上面,滚刷在有水的情况下可以对地面进行清洁,地面上的固体垃圾和污水一起被抽吸到污水箱,首先经过固液分离器,固体大颗粒垃圾被过滤掉,小颗粒垃圾和污水被抽吸到污水箱内部,当清洁机器人需要补清水或者排污水的时候,可以单独拆卸清水箱或污水箱进行补清水或排污水操作,不需要把整机移动到补水点或排污点,水箱的拆卸和安装过程简单易用,方便快捷,用户体验良好。
具体实施方式:
31.一种可拆卸的水箱及清洁机器人,清洁机器人主要包含机器人本体11、清水箱22和污水箱 33。其中,机器人本体11主要由底盘111、清洁模块112、机器人机身113等组成。
32.其中,底盘111提供清洁机器人自主移动的能力,清洁模块112布置于底盘的前方,主要包含边刷1121和滚刷1122,具有清洁地面干垃圾和湿垃圾的功能。
33.其中,机器人机身113具有可容纳清水箱22和污水箱33的容纳空间,分清水箱容纳仓113-1和污水箱容纳仓113-2,两容纳仓左右并列对称布置于机身的后方,并且开口朝上。
34.其中,清水箱容纳仓113-1底部具有入水接口113-1a和出水接口113-1b结构特征,入水接口113-1a用于与清水箱的出水阀223相接,出水接口113-1b与出水管(图中未标出) 相接,使得清水箱22与机器人机身113实现管路相通,保证清水箱22中的水可以被抽到清洁模块112处,供地面或滚刷的清洁使用。
35.其中,污水箱容纳仓113-2,前下方设置有一抽吸接口113-2a,抽吸接口113-2a外圈包裹着第一密封件1131,后下方设置有一排气接口113-2b,排气接口113-2b外圈包裹着第二密封件1132,密封件为软性材质,如硅橡胶、tpu、tpe等,第一密封件1131和第二密封件1132都具有“喇叭”形的边沿。
36.清水箱22,由清水箱本体221、清水箱盖222、出水阀223、出水阀固定件224组成。
37.清水箱本体221,具有一个由塑胶围成的腔体,腔体在顶部中间位置形成一个把手结构特征221a,方便清水箱的拆卸与安装;清水箱本体221的前方顶部开设有一开口221b,开口221b为清水的入口,使用一清水箱盖222密封,清水箱盖222,为软胶材质,如硅橡胶、tpu、tpe等;清水箱本体221的前方底部开设有一开口221c,开口处安装有出水阀 223,通出水阀固定件224进行固定和密封。
38.出水阀223,由出水阀本体2231、出水阀盖2232、阀芯2233、弹簧2234组成。出水阀223上有入水口223a和出水口223b,在正常状态下,阀芯2233在弹簧2234的弹力作用下使得阀芯2233堵住出水口223a,此时出水阀223为闭合状态,水流无法通过,特别地,为了提高闭合效果,阀芯2233靠近出水口223a侧设计了一层软胶2233-1,在弹簧的弹力作用下软胶2233-1被一定程度的挤压,提高了软胶2233-1和出水口223a之间的密封效果。保证清水箱22在取出后,补水的过程中不发生漏水现象。
39.污水箱33,由污水箱本体331、污水箱盖332、固液分离器333、水汽过滤器334组成。
40.污水箱本体331,具有一个由塑胶围成的腔体,腔体在顶部中间位置形成一个把手结构特征331a,方便污水箱的拆卸与安装;腔体的前方设置有一抽吸管道331b,抽吸管道 331b为污水箱33的原身特征,抽吸管道331b的露在腔体外侧的一端为第一抽吸入口331b
‑ꢀ
1,延伸在腔体内部的另一端为第二抽吸入口331b-2;腔体的后方设置有一排气管道331c,排气管道331c为污水箱本体331的原身特征,排气管道331c的露在腔体外侧的一端为第一排气出口331c-1,延伸在腔体内部的另一端为第二排气入口331c-2;
41.污水箱本体331的顶部开设有一开口331d,开口331d下在设置有固液分离器333,固液分离器333为一方形的塑胶过滤器,固液分离器333的上方设计有入口管道333a,入口管道333a为固液分离器333的原身特征,入口管道333a的露在固液分离器外侧的一端为第一入口333a-1,延伸在固液分离器内部的另一端为第二入口333a-2;固液分离器333的下方设计有用于过滤大颗粒垃圾的过滤孔333b,固液分离器333的入口管道333a与污水箱本体331 的抽吸管道331b同轴安装放置,使得固液分离器333的入口管道333a的第二入口333a-2 对齐污水箱本体331的抽吸管道331b的第二抽吸入口331b-2。
42.污水箱盖332,为软胶材质,如硅橡胶、tpu、tpe等,安装带污水箱本体331的顶部的开口处331d,由于采用软胶材质,一方面可以对开口处进行密封,一方面可以方便拆卸和安装,便于取出固液分离器333,实现大颗粒固体垃圾和污水的分类排污。
43.水汽过滤器334,为一过滤棉,放置在污水箱本体331的排气管道331c第一排气出口331c-1和第二排气车出口331c-2之间,具有过滤水汽的作用,防止水汽进入风机(图中未标出),当清水箱22安装到机器人机身11的清水箱容纳仓113-1时,清水箱容纳仓113-1 的入水接口113-1a内有一凸台结构特征t,凸台结构特征t把阀芯2233往上顶开,出水口 223b被打开,此时清水箱内的水可以流出来。
44.当污水箱33安装到机器人机身11的污水箱容纳仓113-2后,第一密封件1131和第二密封件1132“喇叭”形的边沿被挤压,使得第一密封件1131与污水箱本体331的第一抽吸入口331b-1的外围、第二密封件1132与污水箱本体331的第一排气出口331c-1的外围实现密封,保证污水箱33内部腔体的气密性。
45.为了避免清水箱22和污水箱33在清洁机器人工作过程发生晃动,在机器人机身113 上方设置压紧装置1133,压紧装置1133由压紧件11331、弹簧11332、螺栓11333组成,分 3组分别布置在清水箱容纳仓113-1和污水箱容纳仓113-2中间的边缘。压紧件11331在弹簧11332作用下压紧水箱,同时压紧件11331可以绕着螺栓11333的轴线转动,通过转动压紧件11331可以使得水箱处于压紧状态或松开状态,压紧机构简单,效果好,使用方便,同时提高清水箱22和污水箱33的拆卸与安装的便利性。
附图说明
46.附图1清洁机器人水箱的整体结构示意图。
47.附图2清水箱和污水箱与机身连接定示意图。
48.附图3清水箱结构示意图。
49.附图4污水箱结构示意图。
50.附图5清水箱安装的前后状态示意图。
51.附图6压紧模块结构以及压紧过程示意图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1