一种手握食物加工器的单向大行程升降机构的制作方法
1.本实用新型涉及食物处理器领域,更具体的说是涉及一种手握食物加工器的单向大行程升降机构。
背景技术:
2.在食物处理器中,包括手握式设备,其主要用来切割或搅拌食物等,其内设置有升降机构、刀片和轴体,轴体的顶部与刀片可拆卸连接,通过升降机构来带动轴体转动并且往复升降运动,通过刀片来对食物进行加工;
3.其中,现有的升降机构,其将用于带动轴体转动的转动部和用于带动轴体升降的升降部结合在一起,并通过动力机构来提供动力,因升降部设置于转动部的内侧,即转动部设置于升降部的外围,使得升降部内的升降件的高度受限,导致轴体的升降距离受限。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种手握食物加工器的单向大行程升降机构,用于扩大轴体升降的距离范围。
5.为实现上述目的,本实用新型提供了如下技术方案:一种手握食物加工器的单向大行程升降机构,包括壳体以及与所述壳体连接的管体,所述壳体内设置有传动件、轴体以及传动机构,所述传动件和所述轴体滑动连接,所述管体内设置有升降机构,所述升降机构包括限位件以及转动连接于所述轴体上的套管,所述套管外侧面开设有首尾相连的螺旋槽,所述限位件转动连接于所述管体内,并滑动于所述螺旋槽内,所述传动机构包括传动部以及下齿圈,所述轴体穿过所述下齿圈,所述下齿圈与所述套管固定连接,工作时,动力机构通过所述传动件带动所述轴体与所述下齿圈转动,以使所述轴体转动的同时往复升降运动,所述轴体与所述下齿圈之间存在转速差。
6.作为本实用新型的进一步改进,所述传动件内开设有通孔,所述通孔内侧面开设有多个滑槽,所述轴体外侧面一体成型有多个凸条,所述凸条滑动于对应的所述滑槽内。
7.作为本实用新型的进一步改进,所述传动部包括上齿圈、架体以及转动件,所述上齿圈与所述壳体固定连接,所述转动件转动连接于所述架体上,所述转动件包括上齿环以及下齿环,所述上齿环与所述上齿圈和所述传动件啮合,所述下齿环与所述下齿圈啮合,所述上齿环与所述下齿环之间设置有圆环,部分所述圆环位于所述上齿圈与所述下齿圈形成的间隙中。
8.作为本实用新型的进一步改进,所述转动件设置有三个,并沿所述轴体周向均匀分布。
9.作为本实用新型的进一步改进,所述架体包括上盘以及下盘,所述上盘与所述下盘之间固定连接,所述转动件转动连接于所述上盘与所述下盘之间。
10.作为本实用新型的进一步改进,所述上齿环与所述下齿环之间存在齿数差。
11.作为本实用新型的进一步改进,所述管体内固定连接有上架,所述上架底部固定
连接有下架,所述上架底部开设有第一半圆孔,所述下架顶部开设有第二半圆孔,所述第一半圆孔与所述第二半圆孔形成连接孔,所述限位件转动连接于所述连接孔内。
12.作为本实用新型的进一步改进,所述螺旋槽包括第一螺旋段以及第二螺旋段,所述第一螺旋段与所述第二螺旋段相互交叉,并且所述第一螺旋段的顶部与所述第二螺旋段的顶部相连,所述第一螺旋段的尾部与所述第二螺旋段的尾部相连。
13.作为本实用新型的进一步改进,所述轴体上固定连接有上定位件与下定位件,所述套管活动连接于所述上定位件与所述下定位件之间,所述套管包括连接段以及升降段,所述连接段的横截面呈多边形状,所述下齿圈上开设有多边形孔,所述连接段与所述多边形孔嵌合,所述升降段的横截面呈圆形,所述螺旋槽开设于所述升降段外侧面。
14.本实用新型的有益效果:本实用新型中将螺旋槽设置于套管外,并将套管设置于管体内,使得套管的长度可以根据需要进行设计,扩大轴体的升降距离范围,并且实现了轴体转动的同时,进行升降,扩大了刀片可以切割的范围,另外通过插杆与插孔过盈配合的方式进行安装,减少螺栓等标准件的使用,上架与下架亦呈管状,可以维持上架与下架外表面的光滑度,并且使得上架与下架之间无需重叠,减少厚度。
附图说明
15.图1是本实用新型的立体结构示意图;
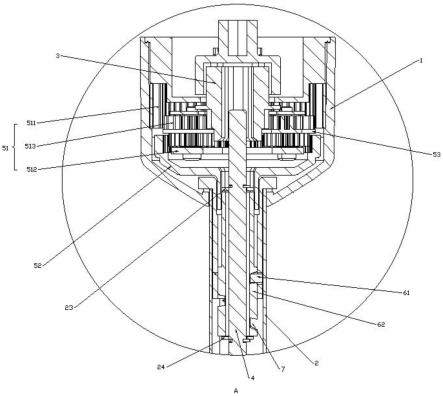
16.图2是本实用新型的剖视图;
17.图3是本实用新型图2中a处的放大示意图;
18.图4是本实用新型中下齿圈处的结构示意图;
19.图5是本实用新型中传动件的结构示意图;
20.图6是本实用新型中转动件处的结构示意图;
21.图7是本实用新型中螺旋槽处的结构示意图;
22.图8是本实用新型中套管处的结构示意图;
23.图9是本实用新型中架体处的结构示意图。
24.附图标记:1、壳体;2、管体;21、上架;211、第一半圆孔;22、下架;221、第二半圆孔;23、上定位件;24、下定位件;3、传动件;31、通孔;32、滑槽;4、轴体;41、凸条;51、传动部;511、上齿圈;512、架体;513、转动件;52、下齿圈;53、圆环;61、限位件;62、套管;621、连接段;622、升降段;7、螺旋槽;71、第一螺旋段;72、第二螺旋段。
具体实施方式
25.下面结合附图和实施例,对本实用新型进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
26.参照图1至图9所示,本实施例的一种手握食物加工器的单向大行程升降机构,包括壳体1以及与壳体1连接的管体2,壳体1与管体2之间卡接,通过卡扣连接的方式进行连接,壳体1内设置有传动件3、轴体4以及传动机构,传动件3和轴体4滑动连接,管体2内设置有升降机构,升降机构包括限位件61以及转动连接于轴体4上的套管62,套管62外侧面开设
有首尾相连的螺旋槽7,限位件61转动连接于管体2内,并滑动于螺旋槽7内;
27.参照图8所示,限位件61包括圆柱头以及与圆柱头固定连接的弧形体,圆柱头与套管62转动连接,弧形体滑动于螺旋槽7内,可以使得弧形体在螺旋槽7内能沿着螺旋槽7的方向,改变其滑动方向;
28.将螺旋槽7设置于套管62外,并将套管62设置于管体2内,使得套管62的长度可以根据需要进行设计,扩大轴体4的升降距离范围。
29.传动机构包括传动部51以及下齿圈52,轴体4穿过下齿圈52,下齿圈52与套管62固定连接,使得当下齿圈52转动时,能够带动套管62转动;
30.工作时,动力机构通过传动件3带动轴体4与下齿圈52转动,以使轴体4转动的同时往复升降运动,轴体4与下齿圈52之间存在转速差,使得套管62与轴体4 之间存在转速差,转速差使得限位件61在螺旋槽7内的位置不断发生改变,从而能带动轴体4往复升降;
31.动力机构可以为电机,用于为传动件3的转动提供动力,从而使得传动件3 可以带动轴体4和下齿圈52转动,电机的输出轴上固定连接套件,套件内开设有凹槽,凹槽内开设有若干个定位槽,多个定位槽沿轴体4的周向均匀分布,传动件3外侧面一体成型有若干个定位条,定位条竖直设置,多个定位条沿轴体4的周向均匀分布,并且定位条可以嵌入对应的定位槽内,形成传动件3与套件之间的连接,连接方式便捷。
32.参照图3和图5所示,传动件3内开设有通孔31,通孔31贯穿整个传动件3,使得轴体4可以沿整个通孔31的深度方向移动,可以根据不同的需要,来设定传动件3的高度,从而来设定不同深度的通孔31,使得轴体4的升降距离扩大,通孔31内侧面开设有多个滑槽32,轴体4外侧面一体成型有多个凸条41,凸条41滑动于对应的滑槽32内,一方面可以使得轴体4能实现滑动,即升降,另一方面使得传动件3转动的时候能够带动轴体4转动。
33.参照图3所示,传动部51包括上齿圈511、架体512以及转动件513,上齿圈 511与壳体1固定连接,转动件513转动连接于架体512上,转动件513包括上齿环以及下齿环,上齿环与上齿圈511和传动件3啮合,传动件3外侧面设置有齿面,下齿环与下齿圈52啮合,上齿环与下齿环之间设置有圆环53,部分圆环53位于上齿圈511与下齿圈52形成的间隙中;
34.因上齿圈511的固定连接,使得转动件513在被传动件3带动而自转的情况下,绕着轴体4周向转动,即自转加公转同时进行,因转动件513公转和转速差,从而带动下齿圈52转动。
35.上齿圈511与下齿圈52的内侧面均开设有齿面,齿面的齿数不同,存在齿数差,上齿环与下齿环之间存在齿数差,整体使得下齿圈52的转速与轴体4的转速不同,即下齿圈52的转速与传动件3的转速不同;
36.上齿圈511与下齿圈52之间形成间隙,即上齿圈511与下齿圈52之间存在间隔空间,转动件513在转动过程中,部分圆环53始终位于该间隙中,使得圆环53 上下移动的空间被限定,从而转动件513上下移动的空间被限定,因此,无需通过轴承来连接架体512,即可实现架体512的安装,并实现架体512随着转动件513 的转动而转动。
37.参照图6、图7和图9所示,转动件513设置有三个,并沿轴体4周向均匀分布,使得转动件513的公转和自转更加的稳定。
38.参照图9所示,架体512包括上盘以及下盘,上盘与下盘之间固定连接,转动件513转动连接于上盘与下盘之间,上盘与下盘之间通过螺栓等标准件进行固定,限定上盘与下
盘之间的距离。
39.参照图7所示,管体2内固定连接有上架21,上架21底部固定连接有下架22,上架21底部开设有插孔,下架22顶部固定连接有插杆,通过插杆与插孔过盈配合的方式进行安装,减少螺栓等标准件的使用,上架21与下架22亦呈管状,可以维持上架21与下架22外表面的光滑度,并且使得上架21与下架22之间无需重叠,减少厚度;
40.上架21底部开设有第一半圆孔211,下架22顶部开设有第二半圆孔221,第一半圆孔211与第二半圆孔221形成连接孔,限位件61转动连接于连接孔内,可以通过第一半圆孔211和第二半圆孔221来固定轴承,通过轴承来连接限位件61。
41.参照图8所示,螺旋槽7包括第一螺旋段71以及第二螺旋段72,第一螺旋段 71与第二螺旋段72相互交叉,并且第一螺旋段71的顶部与第二螺旋段72的顶部相连,第一螺旋段71的尾部与第二螺旋段72的尾部相连,当限位件61从第一螺旋段71的尾部出发进行移动,沿着第一螺旋段71的设置方向移动至其顶部,随后从第一螺旋段71的顶部移动至第二螺旋段72的顶部,并沿第二螺旋段72的设置方向移动至其尾部,随后进入第一螺旋段71的尾部,如此循环,实现套管62 的往复升降,从而实现轴体4的往复升降。
42.参照图3所示,轴体4上固定连接有上定位件23与下定位件24,套管62活动连接于上定位件23与下定位件24之间,简化了套管62的安装方式,减少了轴承等标准件的使用,可以使得轴体4与套管62之间的间隙更小,从而减少管体2的外径,使得手握食物加工器整体的体积更小。
43.参照图8所示,套管62包括连接段621以及升降段622,连接段621的横截面呈多边形状,下齿圈52上开设有多边形孔,连接段621与多边形孔嵌合,通过将连接段621的横截面设置为多边形状的方式,来使得下齿盘转动带动套管62转动,并且因上定位件23和下定位件24的存在,使得套管62在上定位件23和下定位件24之间活动时,始终嵌于多边形孔内,无需安装轴承等零部件,简化了安装方式使得套管62安装在上定位件23和下定位件24之间,可以存在安装误差,并且减少了因需要轴承而带来的套管62外径尺寸,减少了整体管体2的外径。
44.升降段622的横截面呈圆形,螺旋槽7开设于升降段622外侧面,便于螺旋槽 7的设置。
45.工作原理:工作时,电机通过其轴上的套件与传动件3连接,使得带动传动件3转动,传动件3通过与上齿环啮合,从而带动转动件513转动,使得转动件513 自转,因上齿环与上齿圈511啮合,上齿圈511固定于壳体1上,因此,转动件513 围绕轴体4公转,并因上齿环与下齿环之间存在齿数差,会带动下齿圈52转动,从而带动套管62转动,使得限位件61在螺旋槽7内滑动,带动轴体4往复升降运动,轴体4的底部延伸出管体2,并固定连接有刀片,通过刀片对食物进行切割处理。
46.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1