一种智能扫洗消杀一体机器人的制作方法
本技术涉及清洁设备,尤其涉及一种适用室内的智能扫洗消杀一体机器人。
背景技术:
1、伴随着人们对生活质量要求的不断提高,相应地对环境卫生的要求也越来越高。于是出现了许多清洁地面的设备,用以改善环境卫生,常用的清洁设备有吸尘器、自动拖布机以及洗地机等。
2、现有的洗地机结构都比较单一,采用的通常都是半自动的形式进行工作的,在使用的过程中通常都需要安排一名操作员进行操作,这样在使用的时候会增加劳动成本,使用不方便,除此之外,手动驾驶操作在洗地过程中容易造成对清扫区域的遗漏,工作效率较低。
3、现有的智能洗地机器人虽然可以智能清洗地面,但普遍为家居清洁机器人,清洁面积过小,续航时间短,无法对大范围的地面进行有效清洗,而且现有的智能洗地机器人还存在结构复杂、体积庞大等问题,无法对室内的各个区域进行清洁,移动过程中其无法通过房门或者进入电梯,整机的造价和维护成本均较高。
4、再者,现有洗地机器人没有消毒功能,只能人为的在水箱中添加消毒水,用以给地面清洗消毒,消毒范围较小,做不到全方位细菌消杀。
5、故而,亟需提出一种新的技术方案来解决现有技术中存在的问题。
技术实现思路
1、本技术提供一种适用室内的智能扫洗消杀一体机器人,用以解决现有技术中的洗地机器人难以进行大范围室内地面自主清洗及细菌消杀的问题。
2、为了实现上述目的,本技术提供如下技术方案:
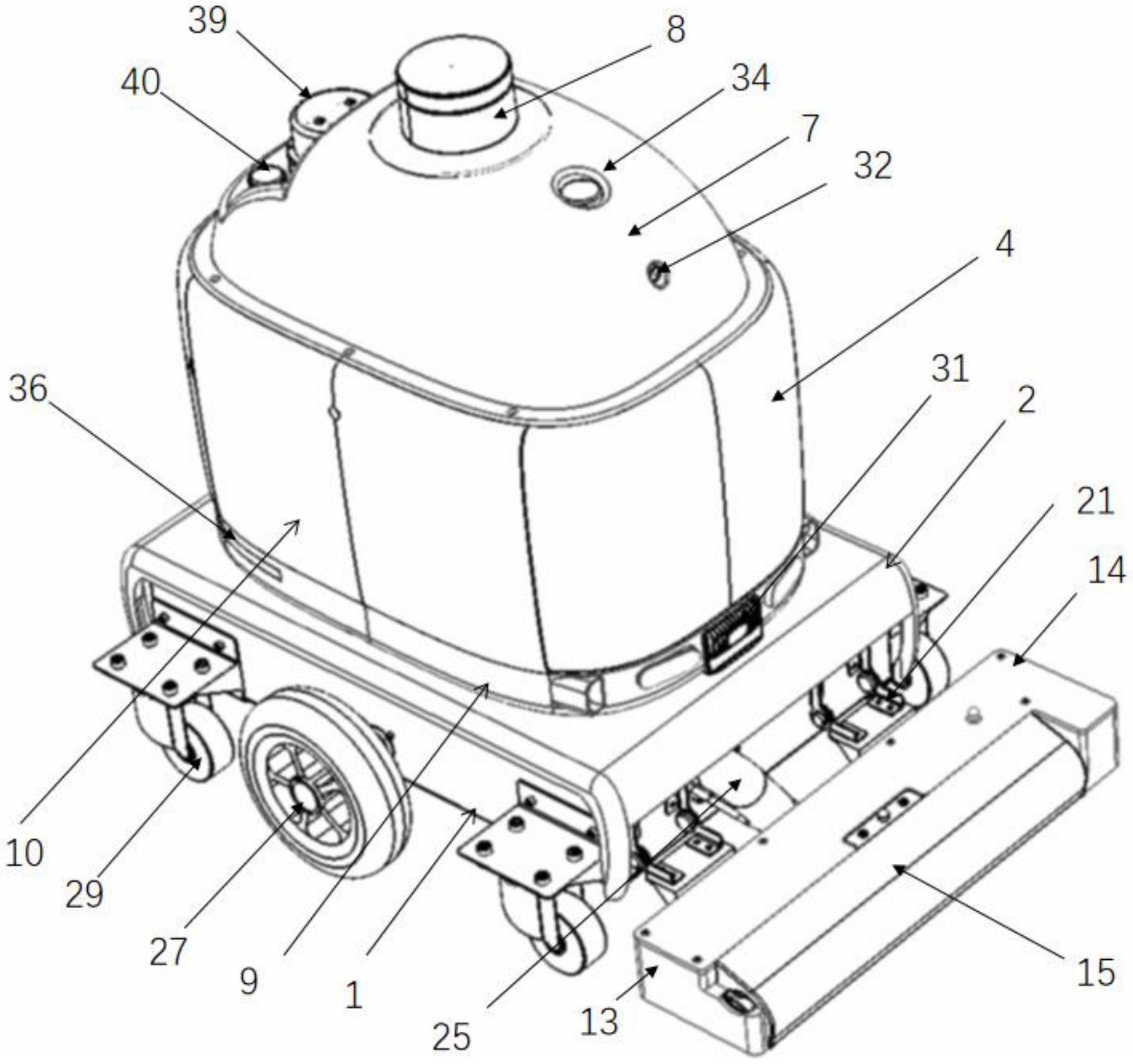
3、本技术提供一种智能扫洗消杀一体机器人,包括底盘、设置在底盘上的机舱、集成在所述机舱内的消杀喷雾模块、集污模块、上位机模块和下位机模块,以及连接在底座一侧的清洁模块,所述底座上还设置有行走模块;
4、所述行走模块包括多个滚轮及驱动所述滚轮滚动的驱动电机;
5、所述清洁模块包括清洁模块舱体、设置在所述清洁模块舱体内的滚刷及滚刷电机,所述机舱内还设置有清水供给组件,所述清水供给组件用以实现对滚刷的喷水湿润,所述滚刷在滚刷电机的驱动下实现对地面的清洁且产生污水;所述清水供给组件包括清水箱、清水电机及蠕动泵;
6、所述集污模块包括污水管、污水箱、污水电机、污水泵,所述污水泵在所述污水电机的驱动下实现对污水的抽吸,且将抽吸的污水排至污水箱内;
7、所述消杀喷雾模块包括消杀水箱、消杀棉棒和雾化片,所述消杀棉棒自所述消杀水箱中吸收消毒水,且将吸收的消毒水传输至所述雾化片上,所述雾化片用以将传输至其上的消毒水雾化为消毒水雾;
8、所述清水箱、污水箱及消杀水箱中分别设置有水位监测装置,所述水位监测装置与上位机模块相连;
9、所述上位机模块用以接收信号且根据所述信号对下位机模块发出控制信号;
10、所述下位机模块用以接收上位机模块发出的信号,且根据接收的信号对所述消杀喷雾模块、集污模块、清洁模块和行走模块输出控制信号。
11、上述技术方案进一步的,所述底盘包括底板和围设在底板边缘的裙边,所述底板和裙边围成腔体结构,所述腔体结构内集成有管道和电线。
12、进一步的,所述底盘上形成有与所述行走模块对应的安装位。
13、进一步的,所述多个滚轮包括四个万向轮和相对设置的两个主动轮,两个所述主动轮通过主动轮轴相连,所述主动轮轴与所述驱动电机相连,所述驱动电机用以实现对所述主动轮的滚动驱动;所述主动轮轴设置在所述底板的中心位置,两个所述万向轮相对设置且位于所述主动轮轴的一侧,另外两个所述万向轮相对设置且位于所述主动轮轴的另一侧。
14、进一步的,所述驱动电机与所述下位机模块相连,所述驱动电机自所述下位机模块接收控制信号,以实现对所述主动轮的启停控制。
15、进一步的,所述清洁模块舱体上形成污水收集口,所述污水收集口与污水管相连。
16、进一步的,所述清洁模块舱体为长条状结构件,所述清洁模块舱体的一侧形成槽状安装座,所述滚刷安装在所述槽状安装座内,所述槽状安装座上设置有与所述滚刷适配的滚刷挡板。
17、进一步的,所述清洁模块舱体上盖设有清洁模块上盖,所述清洁模块上盖与所述清洁模块舱体卡扣连接。
18、进一步的,所述清洁模块舱体的另一侧形成连接座,所述连接座与所述底盘通过阻尼铰链相连。
19、进一步的,所述滚刷电机与所述下位机模块相连,所述滚刷电机自所述下位机模块接收控制信号,以实现对所述滚刷的动作控制。
20、进一步的,所述清水供给组件包括清水管道,所述蠕动泵用以实现对所述清水箱内的清水的抽吸,且将抽吸的清水排至滚刷上。
21、进一步的,所述蠕动泵具有进水端和抽水端,所述蠕动泵的出水端与清水管道的一端相连,所述清水管道的另一端设置有清洁喷嘴,所述蠕动泵用以实现对清洁喷嘴的出水量及出水动作的控制,所述蠕动泵抽吸的清水通过所述清洁喷嘴喷射至所述滚刷上。
22、进一步的,所述蠕动泵与所述下位机模块相连,所述蠕动泵自所述下位机模块接收控制信号,以实现对所述清洁喷嘴的出水量及出水动作的控制。
23、进一步的,所述机舱由第一舱门、第二舱门、舱体左侧板、舱体右侧板和顶盖围成,所述第一舱门、舱体右侧板、第二舱门、舱体左侧板依次首尾相连形成筒体结构,所述筒体结构的一端安装在所述底盘上,另一端安装有所述顶盖,所述筒体结构靠近所述底盘的侧壁上设置围设有一圈围罩,其中,所述第一舱门和第二舱门相对设置,所述舱体左侧板和舱体右侧板相对设置。
24、进一步的,所述围罩上设置有led灯和第一激光雷达,所述第一激光雷达设置在所述机舱的头部,所述led灯设置在所述机舱的尾部,所述第一激光雷达为面阵激光雷达。
25、进一步的,所述顶盖上设置有紧急开关和摄像头,所述紧急开关用以实现对所述智能扫洗消杀一体机器人的紧急制动,所述摄像头与上位机模块相连,所述上位机模块通过所述摄像头采集环境信息。
26、进一步的,所述顶盖上设置有上顶板,所述上顶板上设置有第二激光雷达。
27、进一步的,所述第一激光雷达和第二激光雷达分别与所述上位机模块相连,所述上位机模块通过所述第一激光雷达、第二激光雷达和摄像头中的一个或多个采集环境信息,且根据采集获得的信息规划得到清洁路线,所述上位机根据所述清洁路线向下位机模块发出控制信号,所述下位机模块控制所述行走模块按照所述清洁路线行驶。
28、进一步的,所述第二激光雷达用以实现对行走状态下的所述智能扫洗消杀一体机器人的实时定位、打点,以及建立清洁地图、进行清洁路线规划。
29、进一步的,所述面阵激光雷达用以实现对行走状态下的智能扫洗消杀一体机器人前方的障碍物的探测,当所述面阵激光雷达探测到障碍物时,所述上位机模块通过下位机模块向所述行走模块的驱动电机发出控制信号,所述驱动电机接收所述信号后控制所述滚轮的滚动动作,以实现所述智能扫洗消杀一体机器人的自主避障。
30、进一步的,所述外部终端设备与所述上位机模块信号连接,所述外部终端设备通过所述摄像头获取所述智能扫洗消杀一体机器人的外界环境图像信息,操作人员通过所述外部终端设备向所述上位机模块输出控制信号,所述下位机模块自所述上位机模块接收信号后根据接收的信号对所述消杀喷雾模块、集污模块、清洁模块和行走模块输出控制信号。
31、进一步的,所述清水箱中的水位监测装置用以监测所述清水箱中的清水水位,所述污水箱中的水位监测装置用以监测所述污水箱中的污水水位,所述消杀水箱中的水位监测装置用以监测所述消杀水箱中的消毒水水位。
32、进一步的,所述上位机模块内预存有清水水位最小值、污水水位最大值及消毒水水位最小值,所述上位机模块实时获取每个所述水位监测装置的数值信号,当所述上位机模块监测到有一个所述水位监测装置输出的数值信号超过与其对应的极值时,所述上位机模块向所述下位机模块发出水位预警信号,所述下位机模块对所述行走模块输出动作控制信号,所述行走模块动作且将所述智能扫洗消杀一体机器人移动至预设停靠点。
33、相比现有技术,本技术具有以下有益效果:
34、1、本技术提供的智能扫洗消杀一体机器人上集成了消杀喷雾模块、集污模块、上位机模块、下位机模块、清洁模块及行走模块,行走模块可实现智能扫洗消杀一体机器人的任意方位的移动,清洁模块可实现清洁扫洗功能,消杀喷雾模块可实现杀毒喷雾功能,集污模块可实现边清洗边集污的功能,下位机模块可接收指令信号从而对智能扫洗消杀一体机器人进行动作控制,上位机模块可以实现智能扫洗消杀一体机器人的自动清洁模式,免除人工操作,当然,本技术提供的智能扫洗消杀一体机器人的上位机模块也可以接收外部终端设备的信号,通过该外部终端设备的远程操作也可实现人为对智能扫洗消杀一体机器人的控制。本技术提供的智能扫洗消杀一体机器人的清水箱、污水箱及消杀水箱中分别设置有水位监测装置,水位监测装置与上位机模块相连,当上位机模块监测到一个水位监测装置输出的水箱水位到达预设极值时,上位机模块向下位机模块输出水位预警信号,下位机模块控制行走模块动作,智能扫洗消杀一体机器人返回预设停靠点进行清水、消毒水补充及污水排放。因此,本技术提供的智能扫洗消杀一体机器人实现了大范围的地面自主清洗,且在上位机模块的控制下可以实现自动巡航清洁。
35、2、本技术提供的智能扫洗消杀一体机器人上设置有第一激光雷达、第二激光雷达和摄像头,这些均是信息采集装置可以用来收集外界环境信息,通过上位机模块输出清洁路线,智能扫洗消杀一体机器人按照该清洁路线完成清洁作业,不存在遗漏问题。进一步的,激光雷达的设置还可以帮助智能扫洗消杀一体机器人自主避障,自主识别路线,可通过电梯实现楼层改换。
36、3、本技术提供的智能扫洗消杀一体机器人可被人为控制操作,操作人员可通过外部终端设备向智能扫洗消杀一体机器人的上位机模块发送信号,外部终端设备通过智能扫洗消杀一体机器人上的摄像头获取外界环境图像信息,操作人员通过外部终端设备向上位机模块输出控制信号,下位机模块自上位机模块接收到控制信号后,根据接收的信号对消杀喷雾模块、集污模块、清洁模块和行走模块输出控制信号,实现远程清洁操控。
37、4、本技术提供的智能扫洗消杀一体机器人适用于室内大型场所,可人为操作也可无人驾驶自动清洁,清洁时使用清洁模块的滚刷对地面进行清洁,并通过清洁模块下端的污水收集口(吸尘口)将产生的污水回收到污水箱内,再通过机舱中的消杀喷雾模块对周围进行喷雾消杀,能有效清洗地面,对周围环境进行消毒,该机器人可自主洗扫消杀一体化,整体结构紧凑,体积小,造价和维护成本低,能通过电梯自主改换楼层,扫洗消杀范围大,续航时间长。
- 还没有人留言评论。精彩留言会获得点赞!