一种具有碰撞检测结构的扫地机器人的制作方法
1.本实用新型涉及扫地机器人领域,尤其是一种具有碰撞检测结构的扫地机器人。
背景技术:
2.随着人民生活水平的提高,自动清洁领域中的扫地机器正逐渐走进人们的家庭生活中去,扫地机器人可以通过驱动轮自行移动,并利用滚刷、拖布等清洁件在移动过程中对待清洁地面进行清洁,当扫地机器人在行走时,经常会与墙体、柜体等障碍物发生碰撞,因此现有的扫地机器人一般会在移动方向上的前置区域中放置碰撞检测组件,碰撞检测组件一般设有碰撞板、碰撞板后方的复位弹性件和碰撞信息传感结构,碰撞板与障碍物相接触后通过复位弹性件进行复位,同时碰撞信息传感结构能够获取碰撞信息,扫地机器人根据该碰撞信息进行位置调整。
3.但目前的碰撞检测组件整体结构较为复杂,弹性件就需要使用至少四个,当一个部件失效将不利于保证机体的性能,同时安装不易。
技术实现要素:
4.本发明人针对上述问题及技术需求,提出了一种具有碰撞检测结构的扫地机器人,本实用新型的技术方案如下:
5.一种具有碰撞检测结构的扫地机器人,包括主体、碰撞板和碰撞检测组件,所述主体包括集尘组件和驱动组件,所述碰撞板设置在所述主体的前端,所述碰撞检测组件安装在所述主体中,所述碰撞检测组件包括检测盒、摆动杆和弹性件,所述摆动杆包括第一钩部和转动部,所述检测盒包括第二钩部、轴部和信号传感器,所述摆动杆通过所述转动部绕所述轴部进行摆动,所述信号传感器安装在所述检测盒中用于获取所述摆动杆的位置信号,所述摆动杆至少一部分位于所述检测盒内部并与所述检测盒的内壁相抵接、剩余部分位于所述检测盒外部并与所述碰撞板相抵接,所述摆动杆位于所述检测盒外部的杆件上设置有第一钩部,所述第二钩部设置在所述检测盒的外部,所述第一钩部和第二钩部通过弹性件连接。
6.其进一步的技术方案为,所述摆动杆位于所述检测盒内部的部分为第一杆件,所述第一杆件上设置有弧形杆,当所述碰撞板与障碍物抵接时,所述弧形杆与所述检测盒的内壁相抵接。
7.其进一步的技术方案为,所述检测盒内设置有与所述弧形杆相配合的弧度部,所述弧度部内设置有安装孔。
8.其进一步的技术方案为,所述摆动杆位于所述检测盒外部的部分为第二杆件,所述第二杆件包括与所述碰撞板抵接的抵接杆和主体杆,所述第一钩部设置在所述主体杆上,所述抵接杆与所述主体杆呈钝角设置。
9.其进一步的技术方案为,所述第一钩部和所述第二钩部在靠近所述弹性件的方向上都分别设置有加强件,所述第一钩部上的加强件抵接在所述摆动杆上,所述第二钩部上
的加强件抵接在所述检测盒的外壁上。
10.其进一步的技术方案为,所述加强件的厚度小于所述第一钩部或所述第二钩部的厚度。
11.其进一步的技术方案为,所述检测盒的内壁上设置有支撑件,所述支撑件用于与所述摆动杆的上表面相抵接。
12.其进一步的技术方案为,所述信号传感器为触动开关。
13.其进一步的技术方案为,所述检测盒设置有缺口,所述轴部设置在所述缺口处。
14.本实用新型的有益技术效果是:摆动杆通过转动部绕轴部进行摆动,检测盒设置有上下盖,能够起到对检测盒内部元器件进行保护的作用,同时方便对检测盒进行批量生产、也便于安装在主体的内部,同时检测盒设置有缺口,轴部设置在缺口处,摆动杆也从该缺口伸出检测盒。
附图说明
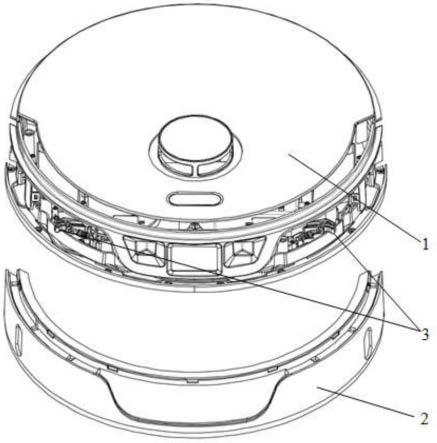
15.图1是本技术的扫地机器人的结构拆解图。
16.图2是本技术的扫地机器人的示意图。
17.图3是本技术的碰撞检测组件的结构拆解图。
18.图4是本技术的碰撞检测组件的常规状态示意图。
19.图5是本技术的碰撞检测组件的碰撞状态示意图。
具体实施方式
20.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
21.如图1和2所示,一种具有碰撞检测结构的扫地机器人,包括主体1、碰撞板2和碰撞检测组件3,主体1包括集尘组件和驱动组件,驱动组件用于驱动主体1进行移动,同时集尘组件能够在主体1移动过程中收集地面脏物,对于扫地机器人的工作模式不是本技术的重点,本领域技术人员依据现有技术即可实现扫地机器人的正常工作,本技术不再过多在此赘述。
22.进一步的,碰撞板2设置在主体1的前端,主体1的前端指的是扫地机器人运行方向的前进方向,当扫地机器人在工作过程中时,碰撞板2能够与障碍物相接触,碰撞检测组件3安装在主体1中并与碰撞板2相抵接,由此碰撞检测组件3能够获取碰撞板2的接触信息,避免扫地机器人与障碍物过多接触而损坏。
23.如图3所示,碰撞检测组件3包括检测盒31、摆动杆32和弹性件33,摆动杆32包括第一钩部321和转动部322,检测盒31包括第二钩部311、轴部312和信号传感器313,摆动杆通过转动部322绕轴部312进行摆动,检测盒31设置有上下盖,能够起到对检测盒内部元器件进行保护的作用,同时方便对检测盒进行批量生产、也便于安装在主体1的内部,同时检测盒31设置有缺口34,轴部312设置在缺口34处,摆动杆32也从该缺口34伸出检测盒31。
24.信号传感器313安装在检测盒31内部并用于获取摆动杆32的位置信息,例如,信号传感器313为触动开关,能够输出开闭两个信号,即可获取当前扫地机器人是否发生碰撞。
25.如图4和5所示,分别示出两种摆动杆的状态,如图4所示为摆动杆32的常规状态,处于该状态下时碰撞板2未与障碍物发生碰撞,摆动杆32与信号传感器保持接触状态,扫地机器人确定此时未发生碰撞,按预设道路继续行驶,而如图5所示为摆动杆32发生碰撞的情况,在该状态下时,碰撞板2与障碍物发生碰撞,确定当前扫地机器人前端有障碍物,此时扫地机器人需绕过障碍物进行移动。
26.下面具体描述摆动杆的结构,摆动杆32包括两部分,摆动杆32至少一部分位于检测盒31内部并与检测盒31的内壁相抵接、剩余部分位于检测盒31外部并与碰撞板相抵接,为了便于描述,摆动杆32位于检测盒31内部的部分为第一杆件323,摆动杆32位于检测盒31外部的部分为第二杆件324,第一钩部321和第二钩部311通过弹性件33相连接,由此,弹性件33位于检测盒31的外部,一方面弹性件33能够使得摆动杆32进行摆动并复位,另一方面弹性件33能够帮助碰撞板2在发生碰撞后进行复位操作,将原本的双弹簧件减少成单弹簧件,同时将弹簧件放置在检测盒31外部,简化了扫地机器人的整体结构。
27.如图3和4所示,当扫地机器人未与障碍物发生碰撞时,此时摆动杆受到弹性件的拉力,使得摆动杆的上表面与检测盒的内壁相接触,避免摆动杆进一步的向上摆动,同时,检测盒31的内壁上设置有支撑件315,支撑件315用于与摆动杆上表面相抵接,由此能够避免摆动杆与检测盒的内壁直接接触,保护检测盒的结构完整性,而如图5所示,当扫地机器人与障碍物发生碰撞时,摆动杆受到碰撞板2的推力而摆动,使得摆动杆的下表面与检测盒的内部相接触,但碰撞板给到摆动杆的力远大于弹性件给到摆动杆的力,因此在第一杆件323设置有弧形杆325,当碰撞板2与障碍物抵接时,弧形杆325与检测盒的内壁相抵接,通过弧形结构能够增大接触面积,将压力分散,避免对检测盒和弧形杆造成损伤,同时,检测盒31设置有与弧形杆相配合的弧度部314,弧度部314内设置有安装孔,通过安装孔将检测盒31安装在主体1中,对检测盒31中的空间进行合理利用。
28.第二杆件324包括与碰撞板抵接的抵接杆326和主体杆327,第一钩部321设置在主体杆327上,抵接杆326与主体杆327呈钝角a设置,抵接杆326和主体杆327不在同一直线上,由此摆动杆32与碰撞板接触产生的力与弹性件拉动摆动杆32的力相间隔,避免多个力一起施加在摆动杆同一位置上。
29.如图5所示,同时为了进一步保护第一钩部321和第二钩部311,在第一钩部321和第二钩部311在靠近弹性件33的方向上都分别设置有加强件328,第一钩部321上的加强件328抵接在摆动杆32上,第二钩部311上的加强件328抵接在检测盒31的外壁上,同时加强件328的厚度小于第一钩部321或第二钩部322的厚度,由此更好的保护第一钩部和第二钩部,避免折断的危险。
30.以上所述的仅是本技术的优选实施方式,本实用新型不限于以上实施例。可以理解,本领域技术人员在不脱离本实用新型的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1