一种基站和清洁系统的制作方法
1.本技术涉及清洁设备技术领域,尤其涉及一种基站和清洁系统。
背景技术:
2.相关技术中,储水箱和集尘箱沿基站的左右方向并排布置在基站上。由于增加基站沿左右方向的宽度尺寸会增加基站的占地面积,因此,基站沿左右方向的宽度十分有限,这就导致储水箱的设计宽度减小,以致于储水箱的容量较小,这样,用户需要多频次地处理储水箱,用户体验感差。
技术实现要素:
3.有鉴于此,本技术实施例期望提供一种基站和清洁系统,能够增大储水箱的容量。
4.为了达到上述目的,本技术实施例的技术方案是这样实现的:
5.本技术实施例一方面公开了一种基站,包括:
6.壳体,所述壳体内形成有容纳腔和放置室,所述容纳腔位于所述放置室的上方;
7.集尘箱,设置在所述放置室内;
8.储水箱组,可拆卸地设置在所述容纳腔内。
9.一实施例中,所述壳体的上侧面形成有外露的取放口,所述取放口与所述容纳腔连通,所述储水箱组能够通过所述取放口进出所述容纳腔。
10.一实施例中,所述储水箱组包括清水箱和污水箱,所述清水箱和所述污水箱沿左右方向并排放置于所述容纳腔中。
11.一实施例中,所述壳体的前侧面形成有与所述放置室连通的放置口,所述集尘箱能够通过所述放置口进出所述放置室。
12.一实施例中,所述基站包括盖板,所述盖板与所述壳体可拆卸连接,以盖合所述放置口。
13.一实施例中,所述储水箱组包括污水箱,所述基站包括污水水路,所述壳体形成有清洗腔和进出口,所述清洗腔位于所述放置室的下方,所述进出口与所述清洗腔连通,清洁机器人能够从所述进出口进出所述清洗腔,所述清洗腔用于清洗所述清洁机器人的清洁件,所述污水水路连通所述清洗腔和所述污水箱。
14.一实施例中,所述基站包括过滤器,所述污水水路包括污水管和污水嘴,所述过滤器设置在所述清洗腔的底壁面上,所述过滤器形成有污水通道和滤水孔,所述滤水孔连通所述清洗腔和所述污水通道,所述污水嘴包括出水口以及与所述出水口连通的负压吸口,所述负压吸口与所述污水通道连通,所述污水管连通所述污水箱和所述出水口。
15.一实施例中,所述基站包括气泵和气管,所述气泵通过所述气管与所述污水箱连通,以在所述污水箱内形成负压。
16.一实施例中,所述储水箱组包括清水箱,所述基站包括主进水水路、进水支路、注水支路、注水口和水泵,所述注水口用于给所述清洁机器人的储水容器注水,所述主进水水
路与所述清水箱连通,所述进水支路的一端连通所述主进水水路,所述进水支路的另一端连通所述清洗腔,所述注水支路的一端连通所述主进水水路,所述注水支路的另一端连通所述注水口,所述水泵设置于所述主进水水路上。
17.一实施例中,所述基站包括风机和尘管组件,所述尘管组件用于连通清洁机器人的尘盒和所述集尘箱,所述风机设置于所述尘管组件上。
18.一实施例中,所述尘盒具有进口和出口,所述尘管组件包括吹气管和集尘管,所述壳体形成有用于与所述进口连通的吹气口和用于与所述出口连通的集尘口,所述集尘管的一端连通所述集尘箱,所述集尘管的另一端连通所述集尘口,所述吹气管的一端通过所述风机连通所述集尘箱,所述吹气管的另一端连通所述吹气口。
19.本技术实施例另一方面公开了一种清洁系统,包括上述实施例中任意一项的基站和清洁机器人。
20.本技术实施例公开了一种基站和清洁系统,通过在壳体内形成容纳腔和放置室,储水箱组可拆卸地设置在容纳腔内,这样,在需要对储水箱组进行加水和/或换水处理时,可以直接将其从容纳腔内拿出进行操作,方便快捷。另一方面,通过将储水箱组和集尘箱沿上下方向布置,避免集尘箱占据基站沿左右方向的宽度空间,储水箱组的宽度可以较大,这样,可以将壳体内上方的更多空间留给储水箱组,以增大储水箱组的容积,这样,便可以减少用户对储水箱组的拿取次数,节省人力,空间利用率高。又一方面,由于用户处理储水箱组的频率要远远高于集尘箱,因此,将容纳腔设置放置室的上方,便于用户在不弯腰或者小幅度弯腰的条件下,便利地取放储水箱组,用户体验感好。
附图说明
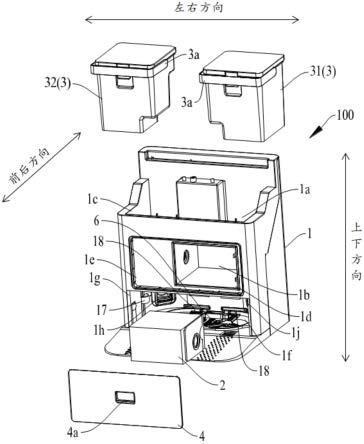
21.图1为本技术一实施例提供的一种基站的爆炸示意图;
22.图2为本技术另一实施例提供的一种基站的结构示意图;
23.图3为图1中污水箱、污水水路、气泵和气管的结构示意图;
24.图4为图1中清水箱、主进水水路、进水支路、注水支路、注水口、水泵和分水嘴的结构示意图;
25.图5为图1中风机、尘管组件和集成箱的结构示意图;
26.图6为本技术实施例提供的一种尘盒的结构示意图。
27.附图标记说明
28.基站100;壳体1;容纳腔1a;放置室1b;取放口1c;放置口1d;凹槽1e;清洗腔1f;进出口1g;吹气口1h;集尘口1j;集尘箱2;储水箱组3;提手3a;清水箱31;污水箱32;盖板4;扣手4a;污水水路5;污水管51;污水嘴52;过滤器6;气泵7;气管8;主进水水路9;进水支路10;注水支路11;注水口12;水泵13;分水嘴14;风机15;尘管组件16;吹气管161;集尘管162;导向轮17;烘干风道18;充电端子19;尘盒200;进口201;出口202。
具体实施方式
29.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的技术特征可以相互组合,具体实施方式中的详细描述应理解为本技术宗旨的解释说明,不应视为对本技术的不当限制。
30.下面结合附图及具体实施例对本技术再做进一步详细的说明。本技术实施例中的“第一”、“第二”等描述,仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含地包括至少一个特征。在本技术实施例的描述中,“多个”的含义是至少两个,例如两个、三个等,除非另有明确具体的限定。
31.本技术实施例一方面提供了一种基站,基站100用于清洁机器人。
32.请参阅图1和图2,基站100包括壳体1、集尘箱2和储水箱组3。壳体1内形成有容纳腔1a和放置室1b,容纳腔1a位于放置室1b的上方。集尘箱2设置在放置室1b内。储水箱组3可拆卸地设置在容纳腔1a内。
33.需要说明的是,由于清洗清洁机器人的清洁件以及给清洁机器人的储水容器加水需要耗费较多的水量,这样,导致清洁机器人在执行2到3次清洁任务后就需要对储水箱组的水进行添加和更换,而对于集尘箱来说,由于其体积较大,因此,可以很长时间处理一次,如一个月处理一次,这样,用户处理储水箱组的频率要远远高于集尘箱。
34.本实施例通过在壳体1内形成容纳腔1a和放置室1b,储水箱组3可拆卸地设置在容纳腔1a内,这样,在需要对储水箱组3进行加水和/或换水处理时,可以直接将其从容纳腔1a内拿出进行操作,方便快捷。另一方面,通过将储水箱组3和集尘箱2沿上下方向布置,避免集尘箱2占据基站100沿左右方向的宽度空间,储水箱组3的宽度可以较大,这样,可以将壳体1内上方的更多空间留给储水箱组3,以增大储水箱组3的容积,这样,便可以减少用户对储水箱组3的拿取次数,节省人力,空间利用率高。又一方面,由于用户处理储水箱组3的频率要远远高于集尘箱2,因此,将容纳腔1a设置放置室1b的上方,便于用户在不弯腰或者小幅度弯腰的条件下,便利地取放储水箱组3,用户体验感好。
35.本技术实施例另一方面提供了一种清洁系统,包括本技术实施例中任意一项的基站100和清洁机器人。
36.本实施例的清洗系统,基站100可以给清洁机器人提供换水和集尘功能,从而延长清洁机器人的工作时长。通过在壳体1内形成容纳腔1a和放置室1b,储水箱组3可拆卸地设置在容纳腔1a内,这样,在需要对储水箱组3进行加水和/或换水处理时,可以直接将其从容纳腔1a内拿出进行操作,方便快捷。其次,将容纳腔1a设置放置室1b的上方,这样,可以将壳体1内上方的更多空间留给储水箱组3,以增大储水箱组3的容积,使其可以储存更多的水,这样,便可以减少用户对储水箱组3的拿取次数,节省人力,空间利用率高,用户体验感好。
37.一实施例中,清洁机器人可以包括控制单元和行走结构,控制单元可以控制行走结构自主行走和清洁件自主作业。以行走结构为滚轮为例,控制单元控制滚轮滚动以带动清洁机器人运动,清洁机器人行走过程中,清洁件可以清洁地面。
38.清洁机器人的外观形状不限,示例性的,清洁机器人可以大致呈扁平的圆盘形。
39.清洁件用于与待清洁面例如地面、桌面等接触以清洁待清洁面。清洁件可以相对地面滚动、旋转或滑动等等,以便清洁件摩擦待清洁面,这样通过清洁件摩擦被清洁面以达到清洁的目的。
40.示例性的,清洁件包括但不限于滚刷和/或抹布等等。
41.清洁件的外观形状不限,示例性的,清洁件可以大致呈圆形。
42.一实施例中,请参阅图1,壳体1的上侧面形成有外露的取放口1c,取放口1c与容纳腔1a连通,储水箱组3能够通过取放口1c进出容纳腔1a。这样,由于储水箱组3的上方没有阻
挡,当用户在需要对使用频次较高的储水箱组3进行加水或者换水时,可以通过外露的取放口1c直接对其进行操作处理,方便快捷,易于实现。可以理解的是,设计外露的取放口1c是为了将位于容纳腔1a内的储水箱组3的部分裸露出来,便于用户对其进行操作处理。
43.示例性的,一实施例中,储水箱组3的材质可以是透明的材质,如亚克力材质,这样,用户可以外露的取放口1c观察储水箱组3的容量,便于用户及时处理。
44.一实施例中,请参阅图1至图4,储水箱组3上形成有提手3a。这样,可以更加便捷对储水箱组3的进行操作处理。
45.一实施例中,请参阅图1和图2,储水箱组3包括清水箱31和污水箱32,清水箱31和污水箱32沿左右方向并排放置于容纳腔1a中。示例性的,污水箱32可以放置在容纳腔1a内的左侧,清水箱31可以放置在容纳腔1a内的右侧。这样,通过沿左右方向并排放置在容纳腔1a内,一方面,可以在不增大基站100的体积的前提下,以提高清水箱31和污水箱32的容量;另一方面,可以方便后续对清水箱31和污水箱32的管道进行安装,避免两者的管道互相干涉。
46.清水箱31用于给清洁机器人的储水容器补充清水。污水箱32用于收集清洗清洁件产生的污水。
47.一实施例中,清水箱31的外周面和污水箱32的外周面均形成有第一导向结构,容纳腔1a的周向壁形成有第二导向结构,第一导向结构和第二导向结构中的一个为导向槽,第一导向结构和第二导向结构中的另一个为导向块,导向槽与导向块形状适配,导向块与导向槽滑动配合。示例性的,第一导向结构为导向槽,第二导向结构为导向块,也就是说,清水箱31和污水箱32的外周面上形成有导向槽,容纳腔1a的周向壁上形成有导向块,这样,便不会增大容纳腔1a的体积,即不会增大基站100的体积,占地面积小。
48.在一些实施例中,第一导向结构为导向块,第二导向结构为导向槽。这样,便不会减小清水箱31和污水箱32的体积,使其能够存储更多水,减少用户对清水箱31和污水箱32的处理频率。
49.一实施例中,请参阅图1,壳体1的前侧面形成有与放置室1b连通的放置口1d,集尘箱2能够通过放置口1d进出放置室1b。这样,用户可以从前侧对集尘箱2进行拿取和装入,操作较为方便。
50.需要说明的是,上下方向、前后方向和左右方向相互垂直,共同构成三维垂直坐标系。
51.示例性的,一实施例中,放置口1d的形状不限,例如,放置口1d的形状可以为正方形、长方形或者圆形等。放置口1d的面积大于集尘箱2的面积,具体以能够装入进集尘箱2为准。
52.一实施例中,请参阅图1和图2,基站100包括盖板4,盖板4与壳体1可拆卸连接,以盖合放置口1d。通过盖板4盖合放置口1d,以增加基站100整体的美观度。
53.示例性的,壳体1上靠近放置口1d的出形成有凹槽1e,盖板4可拆卸设置在凹槽1e内,这样,一方面,由于盖板4没有凸出壳体1上面,可以提高基站100的整体美观性;另一方面,还可以对集尘箱2等零件进行保护。
54.示例性的,一实施例中,盖板4与壳体1的可拆卸方式可以是磁吸、卡接或者螺接等,例如,盖板4靠近壳体1的一面形成有磁铁,凹槽1e内形成有与盖板4磁铁磁性相异的磁
铁,通过磁吸的方式将盖板4设置在凹槽1e内,可以避免在壳体1和盖板4上打孔影响美观。
55.一实施例中,请参阅图1或图2,盖板4上形成有扣手4a。示例性的,扣手4a的设置位置不限,例如扣手4a可以设置在盖板4的中间位置,这样,可以通过扣拉扣手4a,以实现对集尘箱2的拿取和装入,操作方便。
56.一实施例中,请参阅图1至图3,储水箱组3包括污水箱32,基站100包括污水水路5,壳体1形成有清洗腔1f和进出口1g,清洗腔1f位于放置室1b的下方,进出口1g与清洗腔1f连通,清洁机器人能够从进出口1g进出清洗腔1f,清洗腔1f用于清洗清洁机器人的清洁件。这样,当清洁机器人完成对待清洁面的清洗后,可以从进出口1g进入清洗腔1f内,以对清洁件进行清洗。
57.污水水路5连通清洗腔1f和污水箱32。这样,可以将清洗完清洁件的污水通过污水水路5暂存在污水箱32,避免污水与空气接触,影响空气质量,用户体验感好,且也便于用户对污水进行统一处理。
58.一实施例中,请参阅图1至图3,基站100包括过滤器6,污水水路5包括污水管51和污水嘴52,过滤器6设置在清洗腔1f的底壁面上,过滤器6形成有污水通道和滤水孔,滤水孔连通清洗腔1f和污水通道。这样,可以将污水和夹杂在污水中的小颗粒垃圾通过滤水孔收集在污水通道内,以便于后续进行统一处理。
59.污水嘴52包括出水口以及与出水口连通的负压吸口,负压吸口与污水通道连通,污水管51连通污水箱32和出水口。这样,污水通道内的污水和小颗粒垃圾可以及时通过负压吸口进行吸取,然后通过出水口由污水管51排进污水箱32内,避免留存在污水通道内太久产生异味。
60.一实施例中,请参阅图3,基站100包括气泵7和气管8,气泵7通过气管8与污水箱32连通,以在污水箱32内形成负压。示例性的,气泵7工作,通过气管8抽取污水箱32内的气体,以在污水箱32形成负压,为了平衡压力,污水箱32通过污水管51向污水通道内污水进行抽取,这样便完成了对污水的存储,效率高,吸取能力强。
61.一实施例中,请参阅图4,储水箱组3包括清水箱31,基站100包括主进水水路9、进水支路10、注水支路11、注水口12和水泵13,注水口12用于给清洁机器人的储水容器注水,主注水水路与清水箱31连通,进水支路10的一端连通主进水水路9,进水支路10的另一端连通清洗腔1f。示例性的,主进水水路9远离清水箱31的一端安装有分水嘴14,分水嘴14上具有多个分水口,进水支路10一端远离清洗腔1f的一端与分水嘴14上多个分水口中的一个连通,这样,在清洗清洁件时,进水支路10可以通过主进水水路9与清水箱31连通,将清水箱31的清水导入清洗腔1f内,为后续清洁件的清洗提供源源不断的水源。
62.注水支路11的一端连通主进水水路9,注水支路11的另一端连通注水口12。示例性的,注水支路11远离注水口12的一端与分水嘴14上多个分水口中的一个连通,这样,在清洗清洁件的同时,注水支路11可以通过主进水水路9与清水箱31连通,将清水箱31的清水通过注水口12导入清洁机器人的储水容器中,便于清洁机器人在清理待清洁面时,可以对一些灰尘或者纸屑等较轻和较小的垃圾进行打湿处理,方便清洁机器人进行清扫。
63.水泵13设置于主进水水路9上。这样,可以加大对清水箱31内清水的抽取,确保清洗清洁件和为储水容器注水时能够快速地导入清水,效率高。
64.一实施例中,请参阅图5和图6,基站100包括风机15和尘管组件16,尘管组件16用
于连通清洁机器人的尘盒200和集尘箱2,风机15设置于尘管组件16上。这样,通过风机15运转可以将尘盒200内的垃圾通过尘管组件16收集在集尘箱2内,由于集成箱的容积较大,可以容纳更多的垃圾,以减少用户处理尘盒200的次数,节省人力,用户体验感好。
65.一实施例中,请参阅图5和图6,尘盒200具有进口201和出口202。示例性的,进口201和出口202可以设置在尘盒200沿壳体1左右方向的两端。尘管组件16包括吹气管161和集尘管162,壳体1形成有用于与进口201连通的吹气口1h和用于与出口202连通的集尘口1j。示例性的,吹气口1h和集尘口1j可以设置在清洗腔1f内。集尘管162的一端连通集尘箱2,集尘管162的另一端连通集尘口1j,吹气管161的一端通过风机15连通集尘箱2,吹气管161的另一端连通吹气口1h。这里,风机15工作,以驱动气流以在集尘箱2内形成压差,集尘箱2通过集尘管162对尘盒200内进行吸取,这样,尘盒200内的垃圾会随着气流一起导入集尘箱2内,然后气流随着风机15和吹气管161通过进口201重新进入尘盒200内,循环如此,而垃圾则会留在集尘箱2内,以完成对尘盒200内垃圾的收集。
66.一实施例中,请参阅图1和图2,清洗腔1f的内壁面上设置有可转动地导向轮17,导向轮17用于将清洁机器人导向至清洗腔1f中的预设区域。这样,一方面,可以避免清洁机器人与清洗腔1f的内壁面直接接触造成损伤的情况,提高其使用寿命;另一方面,将清洁机器人导向至预设区域,可以使尘盒200的出口202和进口201就自动与尘管组件16的集尘口1j和吹气口1h对其连通,自动化程度高。
67.一实施例中,清洁机器人包括第一通讯模块,基站100包括第二通讯模块,清洁机器人和基站100之间可以通过第一通讯模块和第二通讯模块通讯。例如可以通过第一通讯模块和第二通讯模块进行无线通讯,清洁机器人自行返回至清洗腔1f。
68.示例性的,第一通讯模块和第二通讯模块可以包括但不限于蓝牙模块、无线保真(wireless fidelity,wifi)模块、第四代或第五代(4th generation/5th generation,4g/5g)通信模块或红外线模块等无线数据通信模块中的一种或多种。
69.基站100还可以用于为清洁机器人提供充电和/或烘干等等功能。
70.一实施例中,请参阅图1和图2,基站100包括设置于壳体1上的风干机和烘干风道18,烘干风道18连通风干机和清洗槽。风干机通过烘干风道18向清洗腔1f通风,以便快速烘干清洁件。
71.一实施例中,请参阅图1和图2,基站100包括充电端子19以及与充电端子19电连接的电源模块,清洁机器人位于清洗腔1f中的状态下,清洁机器人可以与充电端子19电连接,实现充电。电源模块用于将市电的交流电转换为直流电,充电端子19使用直流电对清洁机器人进行充电。
72.以上所述,仅为本技术的较佳实施例而已,并非用于限定本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所有的任何修改、等同替换、改进等,均包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1