供液组件及清洁基站的制作方法
1.本技术属于清洁装备技术领域,具体涉及一种供液组件及清洁基站。
背景技术:
2.洗地机器人可以在家庭环境中实现洗地任务,因洗地耗水量较大,如果需求场所较大,洗地机器人往往会遇到缺水现象。为了让给洗地机器人更加智能化,解放双手,往往通过清洁基站来解决供水问题。当前,常见的清洁基站采用电磁泵从清水箱接近顶部的位置抽水,通过一个电磁阀避免水泵失效时回水,因为空间及成本问题,该种方式的电磁泵的流量有限,难以支撑洗地机器人洗地所需要的大水量需求。
技术实现要素:
3.本技术实施例的目的是提供一种供液组件,能够解决当前供水方式难以满足大水量需求等问题。
4.为了解决上述技术问题,本技术是这样实现的:
5.本技术实施例提供了一种供液组件,包括:水箱、止逆阀、控制阀、出水管路、叶轮泵和清水输送管路;
6.所述止逆阀设置于所述水箱的底部,所述出水管路的一端与所述止逆阀连接,所述出水管路的另一端与所述控制阀的进口端连接,所述控制阀的出口端与所述叶轮泵的进口端连接,所述叶轮泵的出口端与所述清水输送管路连接。
7.本技术实施例还提供了一种清洁基站,包括上述供液组件。
8.在本技术实施例中,止逆阀设置于水箱的底部,出水管路的一端与止逆阀连接,使得出水管路中的清水无法回流至水箱中,如此,即使在叶轮泵失效时,清水也无法回流至水箱中;另外,采用叶轮泵替代电磁泵,相比于电磁泵,叶轮泵具有更大的流量,以便于支撑清洁机器人洗地所需要的大量水的需求,从而可以减少对清洁机器人的补水时间,提高补水效率,进而可以提高清洁机器人的作业效率。
附图说明
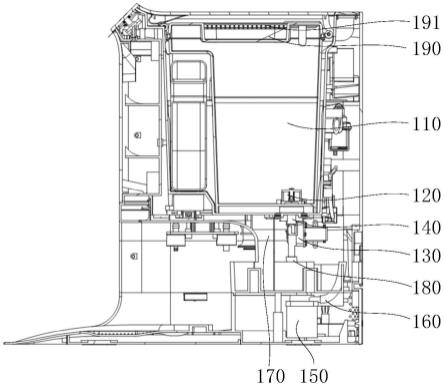
9.图1为本技术实施例公开的清洁基站的第一结构示意图;
10.图2为本技术实施例公开的清洁基站的第二结构示意图。
11.附图标记说明:
12.110-水箱;120-止逆阀;130-控制阀;140-出水管路;150-叶轮泵;160-清水输送管路;170-水箱座;180-软管;190-水箱盖;191-气孔;
13.210-清洁剂输送管路;220-三通管;230-清洁剂泵;240-流体检测传感器。
具体实施方式
14.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
15.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
16.下面结合附图,通过具体的实施例及其应用场景对本技术实施例进行详细地说明。
17.参考图1和图2,本技术实施例公开了一种供液组件,该供液组件可以为清洁机器人补充清水,除此以外,供液组件还可以为清洁机器人补充清洁剂等,以保证清洁机器人的正常清洁作业并提高清洁效果。所公开的供液组件包括水箱110、止逆阀120、控制阀130、出水管路140、叶轮泵150和清水输送管路160。
18.其中,水箱110为基础构件,其可以用于盛装和存储清水,以便于为清洁机器人补水。止逆阀120用于使清水能够沿预设方向流动而无法回流,一些实施例中,止逆阀120设置于水箱110的底部,出水管路140的一端与止逆阀120连接,如此,水箱110中的清水可以经由止逆阀120流入出水管路140,并由出水管路140进行输送,与此同时,通过止逆阀120还可以有效防止出水管路140中的清水回流至水箱110中,从而解决了清水回流的问题。示例性地,水箱110的底部可以开设通孔,止逆阀120安装至通孔中,以便于与出水管路140连接。此处需要说明的是,止逆阀120的具体结构及其工作原理可以参考相关技术,此处不作详细阐述。
19.为了控制出水流量等参数,出水管路140的另一端与控制阀130的进口端连接,如此,通过调节控制阀130的开度可以对出水流量进行控制,以满足多种工况下对于清水流量的需求。示例性地,控制阀130可以为两通电磁阀,其可以更加精确地控制出水流量,当然,控制阀130还可以采用其他形式,本技术实施例对此不作具体限定。另外,出水管路140的另一端与控制阀130的进口端之间可以采用螺纹配合连接,一方面可以方便拆装,便于维修或更换,另一方面还可以保证出水管路140与控制阀130之间的密封性,以缓解泄露问题。
20.控制阀130的出口端与叶轮泵150的进口端连接,叶轮泵150的出口端与清水输送管路160连接,如此,在叶轮泵150的驱动作用下,清水可以进入清水输送管路160,通过清水输送管路160将清水输送至预设位置,以便于为清洁机器人补水。
21.基于上述设置,在本技术实施例中,止逆阀120设置于水箱110的底部,出水管路140的一端与止逆阀120连接,使得出水管路140中的清水无法回流至水箱110中,如此,即使在叶轮泵150失效时,清水也无法回流至水箱110中;另外,采用叶轮泵150替代电磁泵,相比于电磁泵,叶轮泵150具有更大的流量,以便于支撑清洁机器人洗地所需要的大量水的需求,从而可以减少对清洁机器人的补水时间,提高补水效率,进而可以提高清洁机器人的作业效率。
22.为实现对水箱110的支撑和稳固作用,供液组件还可以包括水箱座170,该水箱座
170设置于水箱110的下方,以便于对水箱110进行支撑,以保证水箱110安装的稳固性。示例性地,水箱座170可以设有与水箱110的形状相适应的安装槽,在安装时,可以将水箱110的至少部分嵌入安装槽中,一方面可以实现对水箱110的支撑作用,另一方面还可以对水箱110的侧部进行限位,以保证水箱110的稳定性。当然,水箱座170还可以设有承载平面,在安装时,可以将水箱110的底端面放置于承载平面上,以通过承载平面支撑水箱110。
23.为实现对出水管路140和控制阀130的安装,一些实施例中,出水管路140和控制阀130均采用紧固件安装至水箱座170,如此,在紧固件的紧固作用下,出水管路140和控制阀130均相对于水箱座170保持相对静止,以防止出水管路140和控制阀130随意移动造成零部件之间相互碰撞而导致零部件损坏。
24.示例性地,紧固件可以包括套箍和螺钉,其中,套箍套设在出水管路140的外侧,通过螺钉将套箍安装至水箱座170,由此,在螺钉和套箍的作用下,出水管路140被牢牢限制在水箱座170而不会随意移动。另外,控制阀130可以设有安装孔,螺钉穿入安装孔后与水箱座170螺纹连接,从而可以将控制阀130牢牢固定在水箱座170,以防止控制阀130随意移动。
25.当然,采用上述安装方式还可以便于出水管路140和控制阀130的拆装,以方便维修或更换。
26.为防止清水泄露,一些实施例中,出水管路140与水箱座170之间设有第一密封件,通过第一密封件可以实现对出水管路140与水箱座170之间的密封作用,除此以外,第一密封件还可以用于实现水箱110与水箱座170之间的密封,从而可以有效缓解出水管路140破裂、脱落而形成漏水的问题,如,补水出现异常时,可以通过控制阀130直接锁死出水,因此,可以有效缓解清水泄露的问题。
27.另一些实施例中,出水管路140的另一端与控制阀130的连接处设有第二密封件,通过第二密封件可以对出水管路140与控制阀130的连接处进行密封,以防止连接处出现泄漏。示例性地,第二密封件可以为密封圈、密封环、密封垫等构件,其可以对出水管路140与控制阀130的连接处的一圈进行全方位密封,从而可以保证连接处具有较佳的密封性能。另外,第二密封件可以采用硅胶材质,其具有良好的可变形性,从而可以产生较佳的密封性。
28.考虑到控制阀130与叶轮泵150之间相隔一定的距离,一些实施例中,供液组件还可以包括软管180,该软管180连接于控制阀130的出口端与叶轮泵150的进口端之间。基于此,通过软管180的可变形性,可以进行随意弯曲变形,从而可以适应控制阀130与叶轮泵150之间复杂的相对位置关系。示例性地,软管180可以为塑料管、橡胶管等,既可以保证使用寿命,又可以随意弯曲变形,以满足不同的工况需求。
29.为方便对水箱110加水,一些实施例中,水箱110的顶部可以设有可启闭的水箱盖190,当需要加水时,可以将水箱盖190开启,以通过外部供水系统对水箱110进行加水,以保证水箱110中的清水充足;当不需要加水时,可以将水箱盖190关闭,以防止外部灰尘、杂质等进入水箱110而污染清水,甚至出现堵塞出水管路140、控制阀130,损坏叶轮泵150等情况,从而可以保证供液组件的正常运行。
30.为平衡水箱110内外气压,水箱盖190可以开设有气孔191,该气孔191可以连通水箱110内部与水箱110外部,使水箱110内部气压与水箱110外部气压平衡,从而可以使水箱110中的清水能够流出而不受气压影响。
31.为防止外界灰尘、杂质等通过气孔191进入到水箱110内部而污染清水,在设计气
孔191时,可以使气孔191的孔径相对较小,以便于阻挡灰尘、杂质等;当然,为保证气流顺畅流通,可以设置多个气孔191,具体可以是,水箱盖190的侧部或顶部可以设置一排孔径相对较小的气孔191,既可以阻挡灰尘、杂质等,又可以保证气流畅通。
32.在其他实施例中,气孔191处还可以铺设过滤网,以便于阻挡灰尘、杂质等进入水箱110内部而无法清水。
33.为提高清洁效果,供液组件还可以包括清洁剂输送管路210,通过清洁剂输送管路210可以输送清洁剂,以通过清洁剂提高清洁效果。
34.考虑到清洁剂与清水混合形成的混合液,既可以保证良好的清洁效果,又可以实现一次输送而减少清洁剂输送管路210的尺寸,一些实施例中,供液组件还可以包括三通管220,其中,清水输送管路160的出口端与三通管220的其中一个进口连接,清洁剂输送管路210的出口端与三通管220的另一个进口连接,三通管220的出口用于输出清水和清洁剂混合后的混合液。基于此,通过三通管220可以将清水输送管路160输送的清水与清洁剂输送管路210输送的清洁剂混合,形成清水与清洁剂的混合液,并经由共用管路输送至清洁机器人,以便于对清洁机器人补充混合液,而清洁机器人通过采用混合液清洗地面可以提高对地面的清洁效果。
35.为防止清水压力较大而通过三通管220回流至清洁剂输送管路210中,一些实施例中,清水输送管路160的出口端的轴线与清洁剂输送管路210的出口端的轴线之间的夹角小于或等于30
°
,具体可以包括10
°
、15
°
、20
°
、25
°
、30
°
等等,当然,还可以包括其他度数,本技术实施例对此不作具体限定。
36.通过上述设置,可以有效防止清水输送管路160中的清水通过三通管220进入清洁剂管路中并进入清洁剂泵230,使清洁剂泵230反转,从而可以对清洁剂泵230起到保护作用,以防止清洁剂泵230反转而影响其使用寿命。
37.可选地,清水输送管路160的内径可以为5.5mm,清洁剂输送管路210的内径可以为1.75mm,以保证清水和清洁剂各自供应顺畅,当然,各自还可以是其他尺寸,本技术实施例对此不作具体限定。
38.一些实施例中,清洁剂输送管路210的远离三通管220的一端连接有清洁剂泵230,清洁剂泵230的进口端用于与清洁剂容器连接,如此,在清洁剂泵230的驱动作用下,清洁剂容器中的清洁剂可以沿着清洁剂输送管路210流动,并经由三通管220混合至清水中,以形成清水与清洁剂的混合液,最终通过共用管路输送至清洁机器人而实现对清洁机器人补水。示例性地,清洁剂泵230可以采用蠕动泵,当然,还可以采用其他类型的泵,以保证清洁剂的供应。
39.进一步地,清洁剂输送管路210中可以设有流体检测传感器240,通过流体检测传感器240可以实时检测清洁剂的输送流量,当流体检测传感器240无法检测到清洁剂输送管路210中有清洁剂流动时,表明清洁剂容器中的清洁剂用尽,此时可以通过流体检测传感器240向控制系统或警报系统发送信号,以便于提醒工作人员及时更换清洁剂容器,从而可以保证清洁剂供应充足。此处需要说明的是,流体检测传感器240的具体结构及其工作原理均可参考相关技术,此处不作详细阐述。
40.基于上述供液组件,本技术实施例还公开了一种清洁基站,用于与清洁机器人相配合,以变为为清洁机器人补充清水与清洁剂的混合液,除此以外,清洁基站还可以为清洁
机器人进行充电、抽污等操作,以保证清洁机器人正常进行清洁作业。所公开的清洁基站包括上述供液组件。
41.本技术实施例中的清洁基站的工作过程为:当清洁机器人缺水返回至清洁基站后,清洁基站得到指令后开始对清洁机器人进行补水,此时,控制阀130开启,清水流入叶轮泵150,通过叶轮泵150提供动力而将清水输送至三通管220中,同时,清洁剂泵230也处于运行状态,在清洁剂泵230的作用下向三通管220输送清洁剂,使清洁剂与清水混合形成混合液,并将混合液输送至清洁机器人,实现对清洁机器人的补水操作。
42.综上所述,本技术实施例既可以支撑清洁机器人洗地所需要的大量水的需求,还可以有效防止清水回流,保证了清洁基站的正常运行。
43.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1