用于在机器人厨房工作间中接受食品的自动化料仓系统及相关方法与流程
1.发明领域本发明涉及厨房用具,且更具体地说,涉及能够在餐馆环境中执行各种多个食物制备步骤的机器人厨房用具。2.相关技术的描述由于食物、烹饪技术、厨房用具、厨房工具和器具的种类繁多,因此为消费者提供稳固且有效的装置或装置组合来制备食物是具有挑战性的。此外,食物制备通常是劳动密集型的,并且容易出现人为错误。这些企业雇用的工作人员需要仔细的且有时是过度的培训,以准确且安全地制备食物,因而增加了成本。由此可见,制备和销售食物的企业通常具有较高的劳动力成本,并承受大量的金钱和食物损失以及由于人为错误造成的顾客不满。各种商业食物制备设备解决了其中一些挑战。然而,现有的设备有若干缺点。首先,食物制备设备通常是按定制的解决方案设计成执行有限范围的工作。将许多不同的工件一起链接到工作流中是一个复杂且昂贵的过程,并且导致系统的能力非常有限,而且占用空间很大。第二,这种食物制备设备通常需要批量制备食品。例如,翻盖式烤架(clamshell grill)通常被设计成批量制备多个食品,而不用于单独制备食品。第三,与这种装置的常规非自动化版本相比,这种装置固有的增加的机械复杂性和/或电气复杂性通常导致故障率增加,从而导致较长的故障停机时间。这种故障停机时间对餐馆来说可能尤其昂贵,因为餐馆通常没有现场备用设备,且因此餐馆可能无法烹饪他们菜单上的许多食品,这减少了平均订单量,或者甚至赶走了潜在顾客。第四,与常规版本的设备相比,以及对于它们能够烹饪的各种食品而言,这种食物制备设备通常具有较大的占用空间。由于厨房空间的高成本,这种较大的尺寸对餐馆老板来说是一个挑战。例如,mastermatic油炸锅比没有自动传送机的类似型号大得多。第五,这种食物制备设备的潜在好处往往被其相关联的前期成本所抵消。例如,自动化油炸设备明显比常规油炸设备更昂贵。第六,这种食物制备设备仍然需要厨房工作人员的广泛参与。第七,大多数食物制备设备不与外部数据交互以实现最佳生产调度并减少食物浪费。由于上述挑战,自动化在餐馆和食物服务运营中的使用通常仅限于现场解决方案,而不是利用数据的可用性来建立准确的需求模型以及然后使用这些模型来自动提供生产调度。此外,还存在与用于油炸食品的器具相关联的挑战。油炸篮子(fry basket)用于在油炸锅的烹饪期间容纳食物,从而能够便于产品的捞取。另一种方法被称为“开放式(open-bay)”烹饪,其中食物被扔进油炸锅,且然后被铲出来。传统上,篮子由金属丝或金属板制成,且带有硅胶把手以为抓取篮子的厨房工作人员提供隔热。尽管有隔热把手,工作人员还是暴露于热油和热设备,并且由于油炸锅附近的油飞溅而有滑倒和跌倒的危险。因此,需要一种克服上述挑战的机器人厨房系统和方法。
背景技术:
技术实现思路
0、发明概述
1、一种用于在商业或餐馆厨房中与至少一种厨房用具组合制备食品的机器人厨房系统,包括:机械臂和末端执行器或工具、由末端执行器保持的篮子、以及位于机械臂附近的自动化料仓组件。自动化料仓组件包括多个用于保持食品的料仓。相机或传感器阵列对准料仓,以用于收集料仓中的食品的图像数据。中央处理器可操作以计算执行以下操作的方向并将该方向提供给第一机械臂和自动化料仓组件:(a)将机械臂移动到料仓,以及(b)致动料仓以使食品从料仓中落入篮子中。
2、在实施例中,中央处理器还可操作以计算在篮子接收食品后将篮子移动到油炸锅中的方向并将该方向提供给机械臂。
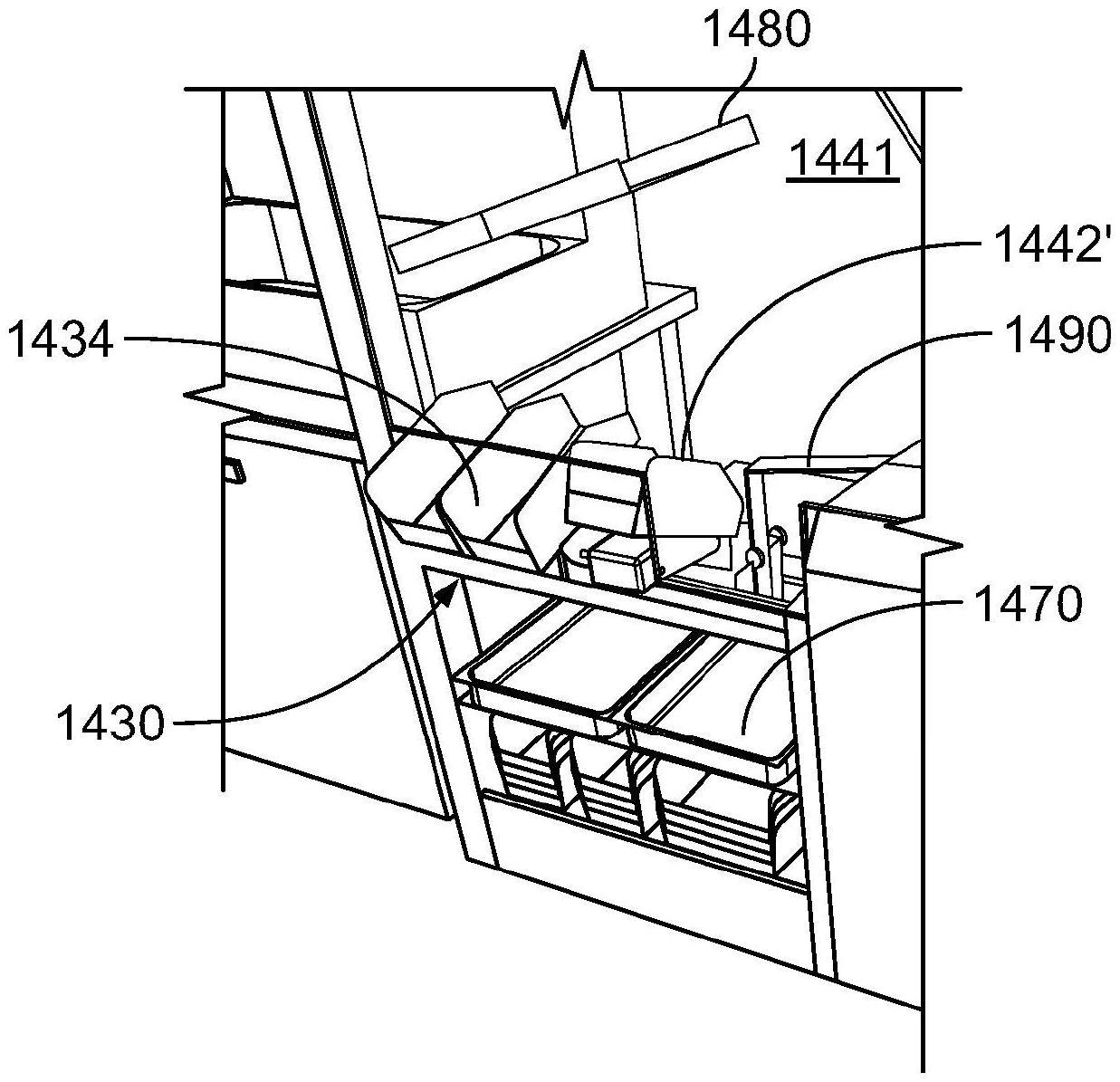
3、在实施例中,机器人厨房系统还包括护罩和护罩中的第一窗口或开口,料仓的至少一部分可以穿过该第一窗口或开口伸出以从护罩外部接收食品。在实施例中,料仓可操作以从第一位置和第二位置旋转,在第一位置,料仓的前部部分穿过第一窗口伸出,在第二位置,食品从料仓的后部开口掉出。
4、在实施例中,中央处理器还可操作以计算并提供在食品在油炸锅中烹饪后通过第二窗口转移食品的方向。
5、在实施例中,机器人厨房系统还包括斜面或斜槽,该斜面或斜槽延伸穿过第二窗口并且且以向下的角度布置,使得被放置在斜面上的食品沿着斜面向下滑出第二窗口。
6、在实施例中,自动化料仓状况包括多个料仓,每个料仓可自动旋转。
7、在实施例中,机器人厨房系统包括多个油炸锅。
8、在实施例中,机器人厨房系统还包括调度引擎,该调度引擎基于从由相机数据、顾客订单、库存和食谱信息组成的组中选择的多个输入来确定检测食品并将食品从每个料仓转移到油炸锅进行烹饪的食物制备步骤的序列。
9、在实施例中,机器人厨房系统还包括框架和线性引导件,护罩附接到该框架,机械臂可移动地联接到该线性引导件。
10、向机器人厨房工作间进行自动化食物转移的方法
11、在实施例中,一种在具有用于烹饪食品的至少一个厨房用具的商业或餐馆厨房中机器人化地制备食品的方法,包括以下步骤:检测被放置在料仓中的食品;机器人化地操纵该料仓下方的篮子,其中,机器人化地操纵是用机械臂执行的;以及自动移动该料仓以将食品转移到篮子。
12、在实施例中,该方法还包括在食品已经被转移到篮子之后,机器人化地操纵篮子进入烹饪用具。
13、在实施例中,该方法还包括使用编程处理器和图像数据对料仓中的食品进行分类。
14、在实施例中,该方法还包括使用编程处理器基于食品的类型来确定食品的烹饪调度。
15、在实施例中,该方法还包括在食品已经被烹饪后,从烹饪用具移除容纳食品的篮子。
16、在实施例中,该方法还包括机器人化地将烹饪过的食品倾倒到目标表面上。在实施例中,目标表面是斜面,并且斜面被成形和布置成使得被倾倒在斜面上的食品向下滑动并落入食物保持区域中。
17、在实施例中,该方法还包括在机械臂和油炸锅的前方提供护罩,并且其中,护罩包括用于料仓的一部分伸出的第一开口。
18、在实施例中,自动移动料仓的步骤是通过使用可移除地联接到料仓的马达或致动器旋转料仓来执行的。
19、在实施例中,该方法还包括将料仓与马达断开并清洁料仓。
20、在实施例中,该方法还包括使用编程处理器控制机械臂,以基于来自相机或传感器的图像数据机器人化地操纵篮子。
21、在实施例中,该方法还包括使用编程处理器控制料仓,以基于来自相机或传感器的图像数据将食品转移到篮子。
22、自动化料仓站
23、一种用于将食品从人类转移到机器人厨房助手的自动化食物料仓站,包括:料仓;马达,该马达可移除地联接到料仓,并且可操作以使料仓在用于接收食品的第一位置和用于倾倒食品的第二位置之间移动;传感器阵列,该传感器阵列用于获得料仓的图像数据;处理器,该处理器用于检测和分类料仓中的食品,并用于指示马达以使料仓在第一位置和第二位置之间移动。
24、在实施例中,自动化料仓站还包括斜面,该斜面延伸穿过第二窗口并且以向下的角度布置成使得被放置在斜面上的食品从外壳内沿着斜面向下滑出第二窗口。
25、可选地,用于从斜面收集食物的分拣料仓被布置在斜面出口端的下方。在实施例中,线性轨道和马达适于横向地和旋转地移动分拣料仓,并且中央处理器还可操作以计算和提供将分拣料仓移动到至少一个食物保持托盘以及将食物倾倒到食物保持托盘中的方向。
26、一种用于在需要人类与机器人协同工作的工作环境中相对于人类工作间封锁机器人工作间以保护人类免受因与机器人接触而引起的伤害的方法,包括:通过物理屏障中的窗口将对象收集区从机器人工作间自动呈现到人类工作间中,所述物理屏障将人类工作间与机器人工作间分开;以及自动操纵对象收集区以将被放置在对象收集区中的对象运送到机器人工作间,其中,操纵步骤是独立于人类和机器人执行的。
27、在实施例中,该方法还包括当对象被放置在对象收集区中时自动检测对象。对象的示例是食品,例如冷冻薯条或鸡腿。对象收集区的示例包括但不限于料仓、腔室、容器和推车以及被设置在传送带组件、支架或引导系统上的空间。
28、在实施例中,该方法还包括将烹饪工具定位在对象收集区的一部分下方,其中该定位由机器人执行。
29、在实施例中,该方法还包括自动移动对象收集区以将对象转移到烹饪工具。烹饪工具的示例是油炸篮子。
30、在实施例中,该方法还包括机器人化地移动烹饪工具以将对象倾倒到路径上,其中,该路径被配置为将对象从机器人工作间内部运送到机器人工作间外部。在实施例中,该路径是斜槽,并且斜槽以向下倾斜的角度布置,从而基于重力运送对象。
31、在实施例中,自动操纵的步骤由自动化料仓组件执行,该自动化料仓组件包括多个计算机控制的料仓,每个计算机控制的料仓适于从第一取向旋转或倾斜到第二取向,该第一取向用于从人类工作间中的人类接收对象,该第二取向用于将对象定位在机器人工作间内部。
32、如本文所述,一种自动化分拣站。
33、如本文所述,一种自动化料仓站。
34、如本文所述,一种用于将食品从料仓转移到篮子的方法。
35、如本文所述,一种可操作以将食品从料仓转移到篮子的机器人厨房系统。
36、本发明的实施例的描述、目的和优点从后续的详细描述连同所附附图将变得明显。
- 还没有人留言评论。精彩留言会获得点赞!