基于显示终端的地图方位校正方法与流程
本公开涉及地图校准,尤其涉及一种基于显示终端的地图方位校正方法。
背景技术:
1、清洁机器人能够凭借人工智能技术,自动在房间内完成地面清理工作,为清扫工作带来极大便利。
2、目前,清洁机器人可以自动构建地图,用户在显示终端中可以查看清洁机器人构建的地图(例如发明专利cn110000786b中公开的内容),但是用户在构建的地图中只能看到各个元素之间的相对位置,无法判断地图中各个元素的实际物理朝向,也就是地图中各个边界的实际物理朝向,导致用户在显示终端中查看清洁机器人构建的地图时不太直观,在显示终端中看到的地图中的各个元素的朝向可能与实际的物理朝向不符,用户体验较差。
技术实现思路
1、为了解决上述技术问题,本公开提供了一种基于显示终端的地图方位校正方法。
2、本公开实施例的第一方面提供了一种基于显示终端的地图方位校正方法,包括:
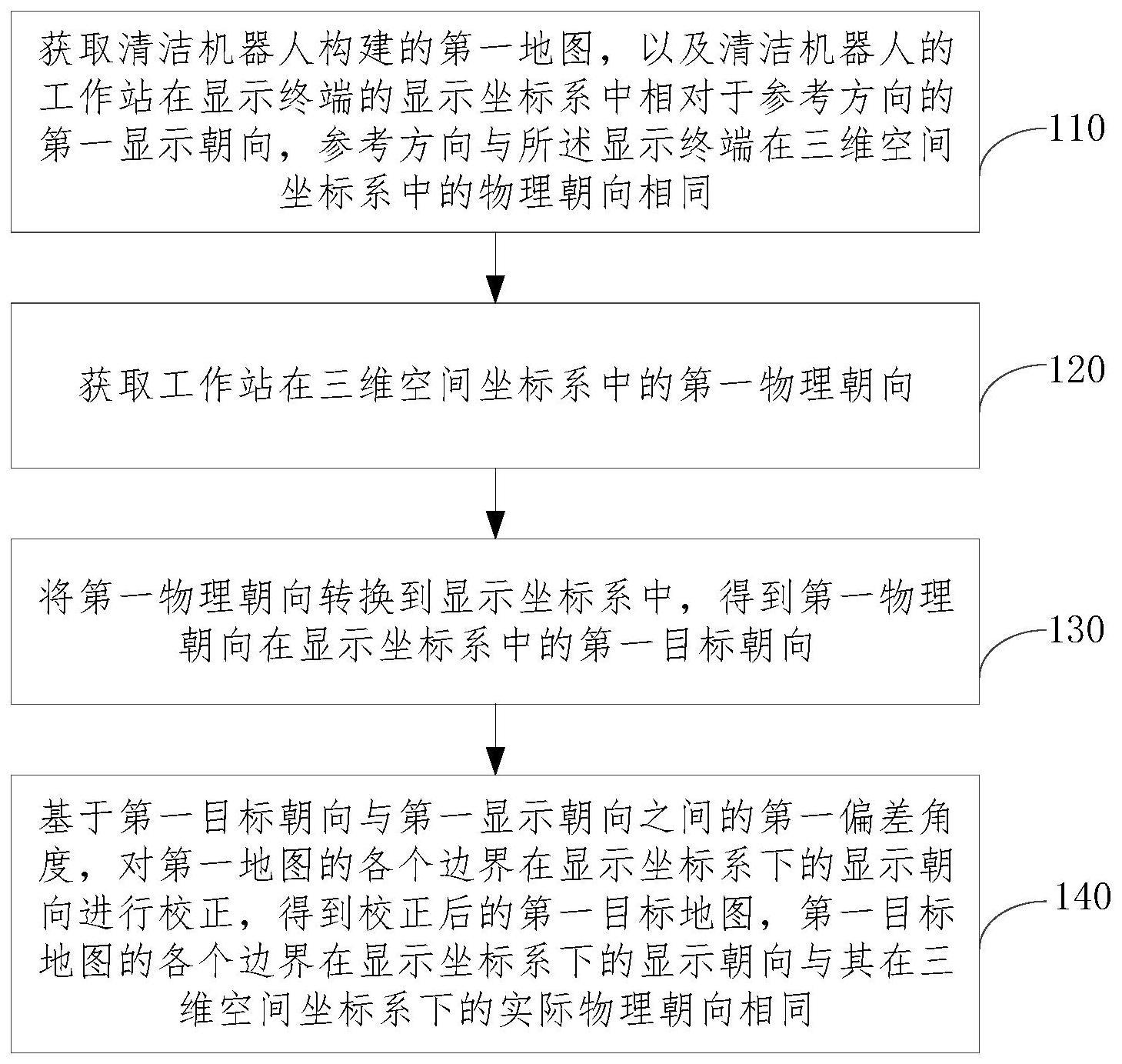
3、获取清洁机器人构建的第一地图,以及清洁机器人的工作站在显示终端的显示坐标系中相对于参考方向的第一显示朝向,参考方向与显示终端在三维空间坐标系中的物理朝向相同;
4、获取工作站在三维空间坐标系中的第一物理朝向;
5、将第一物理朝向转换到显示坐标系中,得到第一物理朝向在显示坐标系中的第一目标朝向;
6、基于第一目标朝向与第一显示朝向之间的第一偏差角度,对第一地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第一目标地图,第一目标地图的各个边界在显示坐标系下的显示朝向与其在三维空间坐标系下的实际物理朝向相同。
7、可选的,上述获取工作站在三维空间坐标系中的第一物理朝向,包括:
8、响应于将显示终端沿预设方向且显示终端的物理朝向与预设方向相同放置于工作站的标定区域内,基于显示终端中设置的第一方位传感器,获取显示终端在三维空间坐标系中的第一终端物理朝向;
9、基于预设方向与工作站的绝对朝向之间的预设偏差角度,将第一终端物理朝向旋转预设偏差角度,得到工作站在三维空间坐标系中的第一物理朝向。
10、可选的,上述获取工作站在三维空间坐标系中的第一物理朝向,包括:
11、基于工作站中设置的第二方位传感器,从第二方位传感器中获取工作站在三维空间坐标系中的第一物理朝向。
12、可选的,上述将第一物理朝向转换到显示坐标系中,得到第一物理朝向在显示坐标系中的第一目标朝向,包括:
13、获取显示终端在三维空间坐标系中的第一终端物理朝向;
14、计算第一物理朝向与第一终端物理朝向之间的夹角;
15、基于参考方向与终端物理朝向的对应关系,将第一终端物理朝向转换到显示坐标系中,得到第一终端物理朝向在显示坐标系中的第一终端显示朝向,对应关系包括参考方向与终端物理朝向相同;
16、将第一终端显示朝向绕显示坐标系的原点旋转夹角,得到第一物理朝向在显示坐标系中的第一目标朝向。
17、可选的,上述基于第一目标朝向与第一显示朝向之间的第一偏差角度,对第一地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第一目标地图,包括:
18、计算第一目标朝向与第一显示朝向之间的第一偏差角度;
19、将第一地图绕第一地图的地图中心轴旋转第一偏差角度,得到第一目标地图。
20、可选的,上述基于第一目标朝向与第一显示朝向之间的第一偏差角度,对第一地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第一目标地图之后,方法还包括:
21、获取显示终端在三维空间坐标系中的第二终端物理朝向;
22、计算第二终端物理朝向相对于第一终端物理朝向的第二偏差角度;
23、基于第二偏差角度,对第一目标地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第二目标地图,第二目标地图的各个边界在显示坐标系下的显示朝向与其在三维空间坐标系下的实际物理朝向相同。
24、可选的,上述基于第二偏差角度,对第一目标地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第二目标地图,包括:
25、将第一目标地图绕第一目标地图的地图中心轴旋转第二偏差角度,得到第二目标地图。
26、可选的,上述基于第一目标朝向与第一显示朝向之间的第一偏差角度,对第一地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第一目标地图之后,方法还包括:
27、响应于清洁机器人构建第二地图,获取第二地图以及清洁机器人的工作站在显示终端的显示坐标系中相对于参考方向的第二显示朝向;
28、基于第一目标朝向与第二显示朝向之间的第三偏差角度,对第二地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第三目标地图,第三目标地图的各个边界在显示坐标系下的显示朝向与其在三维空间坐标系下的实际物理朝向相同。
29、可选的,上述基于第一目标朝向与第一显示朝向之间的第一偏差角度,对第一地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第一目标地图之后,方法还包括:
30、在工作站的第一物理朝向发生变化时,获取工作站在三维空间坐标系中的第二物理朝向;
31、响应于清洁机器人构建第三地图,获取第三地图以及清洁机器人的工作站在显示终端的显示坐标系中相对于参考方向的第三显示朝向;
32、将第二物理朝向转换到显示坐标系中,得到第二物理朝向在显示坐标系中的第二目标朝向;
33、基于第二目标朝向与第三显示朝向之间的第四偏差角度,对第三地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第四目标地图,第四目标地图的各个边界在显示坐标系下的显示朝向与其在三维空间坐标系下的实际物理朝向相同。
34、可选的,上述基于第一目标朝向与第一显示朝向之间的第一偏差角度,对第一地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第一目标地图之后,方法还包括:
35、在显示界面上显示第一目标地图的至少一个边界在三维空间坐标系下的实际物理朝向。
36、本公开实施例提供的技术方案与现有技术相比具有如下优点:
37、本公开实施例,通过获取清洁机器人构建的第一地图,以及清洁机器人的工作站在显示终端的显示坐标系中相对于参考方向的第一显示朝向,参考方向与显示终端在三维空间坐标系中的物理朝向相同;获取工作站在三维空间坐标系中的第一物理朝向;将第一物理朝向转换到显示坐标系中,得到第一物理朝向在显示坐标系中的第一目标朝向;基于第一目标朝向与第一显示朝向之间的第一偏差角度,对第一地图的各个边界在显示坐标系下的显示朝向进行校正,得到校正后的第一目标地图,第一目标地图的各个边界在显示坐标系下的显示朝向与其在三维空间坐标系下的实际物理朝向相同,可以根据工作站的实际物理朝向,对清洁机器人构建的地图在终端中的显示朝向进行校正,使地图的各个边界在显示坐标系下的显示朝向与其在三维空间坐标系下的实际物理朝向相同,此时用户在显示终端中看到的地图中的各个元素的显示朝向与实际物理朝向相符,提高了用户的使用体验。
- 还没有人留言评论。精彩留言会获得点赞!