能源消耗计算方法、扫地机器人及计算机可读存储介质与流程
本发明涉及扫地机器人领域,尤其涉及一种能源消耗计算方法、扫地机器人及计算机可读存储介质。
背景技术:
1、扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在室内和室外内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成拖地、吸尘、擦地工作的机器人,也统一归为扫地机器人,现有的扫地机器人包括拖布,在扫地机器人清扫过程中,拖布能够实现拖地的效果,也即是说,扫地机器人不仅具有扫地的功能,还具备有拖地的功能,提升了扫地机器人的多功能化,提升了用户的体验。
2、一般的,当扫地机器人机开始执行全局清扫任务之后,由于扫地机清扫数据只作为记录上传至云端,从而用户是无法清楚了解不同清扫任务所消耗电量、水量等数据,用户不能够清楚了解扫地机器人的工作状态,导致用户对扫地机器人的认知降低,不利于用户的使用。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能源消耗计算方法、扫地机器人及计算机可读存储介质,以解决现有技术中的用户对扫地机器人的工作状态不了解的问题。
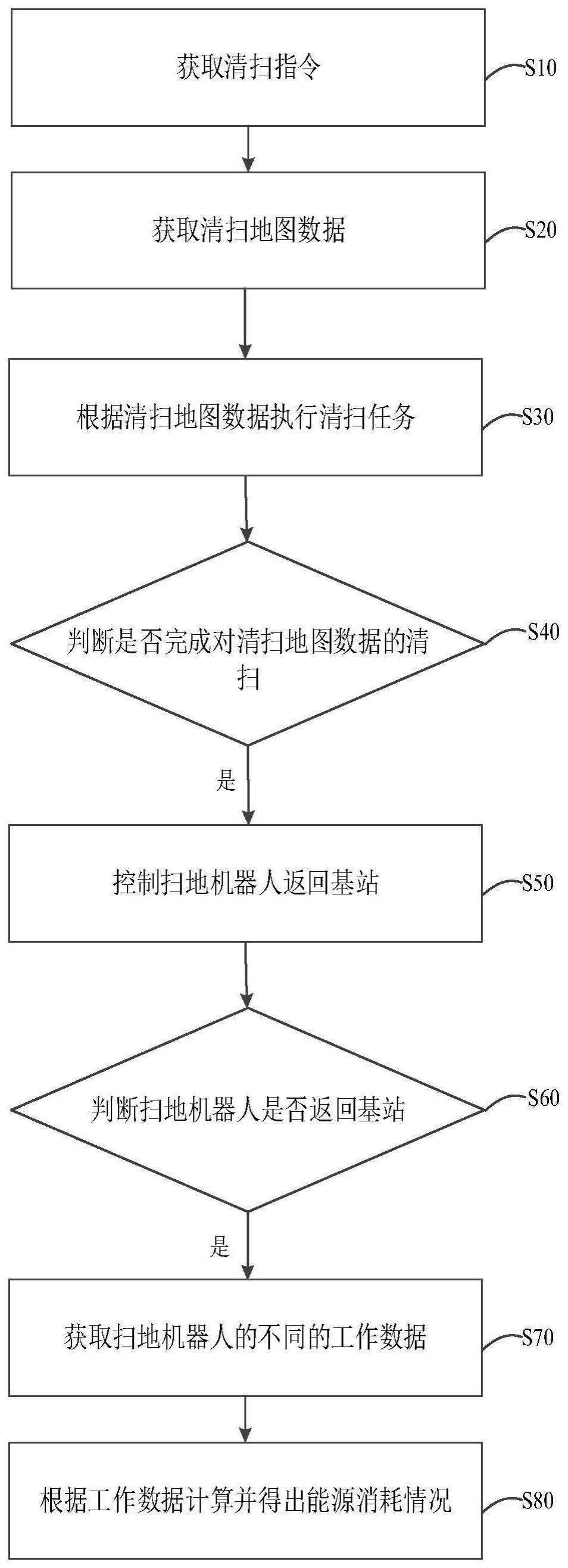
2、本发明实施方式提供一种能源消耗计算方法,用于扫地机器人,所述能源消耗计算方法包括:
3、获取清扫指令;
4、获取清扫地图数据;
5、根据所述清扫地图数据执行清扫任务;
6、判断是否完成对所述清扫地图数据的清扫;
7、若是,控制所述扫地机器人返回基站;
8、判断所述扫地机器人是否返回基站;
9、若是,获取所述扫地机器人的不同的工作数据;
10、根据所述工作数据计算并得出能源消耗情况。
11、本发明的能源消耗计算方法,在扫地机器人获取到清扫指令之后会根据清扫指令获取对应的清扫地图数据,然后根据清扫地图数据执行清扫任务,之后在清扫任务完成之后返回基站,在判断扫地机器人返回基站的情况下,会获取此次扫地机器人工作过程中的不同的工作数据,然后根据不同的工作数据来得出能源消耗情况。如此设置,用户能够在扫地机器人完成一次清洁工作后,快速的了解扫地机器人的工作状态和能源消耗量,例如边刷的使用时长、水箱的水量情况等,然后多次之后,用户会对扫地机器人具备有更高的了解和认知,如此,在后续使用扫地机器人的情况下,用户能够根据当前扫地机器人的状态来判断扫地机器人是否能够完成清扫,避免出现清扫不彻底的情况发生,提升了用户的清扫的效率。
12、进一步地,所述若是,获取所述扫地机器人的不同的工作数据,包括:
13、获取所述扫地机器人的第一边刷工作时长数据;
14、获取所述扫地机器人的第一拖布的出水数据;
15、获取所述扫地机器人的第一集尘数据;
16、根据所述扫地机器人的第一边刷工作时长数据、所述扫地机器人的第一拖布的出水数据以及所述扫地机器人的第一集尘数据计算并得出所述能源消耗情况。
17、进一步地,所述若是,获取所述扫地机器人的不同的工作数据之前,包括:
18、控制基站对所述扫地机器人进行自动集尘。
19、进一步地,所述控制基站对所述扫地机器人进行自动集尘之后,包括:
20、判断所述扫地机器人是否存在断点续扫操作;
21、若是,控制所述基站给扫地机器人充电;
22、检测所述扫地机器人的当前电量;
23、判断所述当前电量是否大于预设值;
24、若是,获取所述扫地机器人的充电时长数据。
25、进一步地,所述判断所述扫地机器人是否存在断点续扫操作,包括:
26、若否,获取所述扫地机器人的不同的工作数据;
27、根据所述工作数据计算并得出能源消耗情况。
28、进一步地,所述若是,获取所述扫地机器人的充电时长数据之后,包括:
29、控制扫地机器人离开所述基站进行清扫工作;
30、判断所述清扫任务是否完成;
31、若是,控制所述扫地机器人返回基站;
32、判断所述扫地机器人是否返回基站;
33、若是,控制所述基站给所述扫地机器人集尘;
34、判断所述集尘是否完毕;
35、若是,获取所述扫地机器人的不同的工作数据;
36、根据所述工作数据计算并得出能源消耗情况。
37、进一步地,所述若是,获取所述扫地机器人的不同的工作数据,包括:
38、获取所述扫地机器人的第二边刷工作时长数据;
39、获取所述扫地机器人的第二拖布的出水数据;
40、获取所述扫地机器人的第二集尘数据。
41、进一步地,所述根据所述工作数据计算并得出能源消耗情况,包括:
42、根据所述扫地机器人的第一边刷工作时长数据、所述扫地机器人的第一拖布的出水数据、所述扫地机器人的第一集尘数据、所述扫地机器人的二边刷工作时长数据、所述扫地机器人的第二拖布的出水数据以及所述扫地机器人的第二集尘数据和所述充电时长数据计算并得出能源消耗情况。
43、本发明实施方式提供一种扫地机器人,所述扫地机器人包括:
44、第一获取模块,所述第一获取模块用于获取清扫指令;
45、第二获取模块,所述第二获取模块用于获取清扫地图数据;
46、执行模块,根据所述清扫地图数据执行清扫任务;
47、第一判断模块,所述第一判断用于判断是否完成对所述清扫地图数据的清扫;
48、控制模块,所述控制模块用于在所述第一判断模块判断已经完成对清扫地图数据的清扫的情况下,控制所述扫地机器人返回基站;
49、第二判断模块,所述第二判断模块用于在所述控制模块控制所述扫地机器人返回基站的情况下,判断所述扫地机器人是否返回基站;
50、第三获取模块,所述第三获取模块用于在所述第二判断模块判断所述扫地机器人返回基站的情况下,获取所述扫地机器人的不同的工作数据;
51、计算模块,所述计算模块用于根据所述工作数据计算并得出能源消耗情况。
52、本发明的扫地机器人,在扫地机器人获取到清扫指令之后会根据清扫指令获取对应的清扫地图数据,然后根据清扫地图数据执行清扫任务,之后在清扫任务完成之后返回基站,在判断扫地机器人返回基站的情况下,会获取此次扫地机器人工作过程中的不同的工作数据,然后根据不同的工作数据来得出能源消耗情况。如此设置,用户能够在扫地机器人完成一次清洁工作后,快速的了解扫地机器人的工作状态和能源消耗量,例如边刷的使用时长、水箱的水量情况等,然后多次之后,用户会对扫地机器人具备有更高的了解和认知,如此,在后续使用扫地机器人的情况下,用户能够根据当前扫地机器人的状态来判断扫地机器人是否能够完成清扫,避免出现清扫不彻底的情况发生,提升了用户的清扫的效率。
53、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述能源消耗计算方法。
54、本发明的计算机可读存储介质,在扫地机器人获取到清扫指令之后会根据清扫指令获取对应的清扫地图数据,然后根据清扫地图数据执行清扫任务,之后在清扫任务完成之后返回基站,在判断扫地机器人返回基站的情况下,会获取此次扫地机器人工作过程中的不同的工作数据,然后根据不同的工作数据来得出能源消耗情况。如此设置,用户能够在扫地机器人完成一次清洁工作后,快速的了解扫地机器人的工作状态和能源消耗量,例如边刷的使用时长、水箱的水量情况等,然后多次之后,用户会对扫地机器人具备有更高的了解和认知,如此,在后续使用扫地机器人的情况下,用户能够根据当前扫地机器人的状态来判断扫地机器人是否能够完成清扫,避免出现清扫不彻底的情况发生,提升了用户的清扫的效率。
- 还没有人留言评论。精彩留言会获得点赞!