一种新型幕墙清洁机器人及其清洁方法与流程
本发明涉及幕墙清洁机器人,尤其涉及一种新型幕墙清洁机器人及其清洁方法。
背景技术:
1、建筑幕墙的清洁工作一直以来都是市政工程中重要的一部分;当前市场中的幕墙清洁工作依然是靠人工清洗,这种高空作业方式一直都会对幕墙清洁人员的生命安全造成威胁,人工清洗幕墙作业效率比较慢、对清洗人员的身体素质和职业素养有较高的要求;同时清洗工作所用的清洗剂也会对清洗人员的身体健康产生危害,随着老龄化趋势的日益加重,清洗人员的数量不断减少,这也造成人工清洗的成本不断提高。
2、现有的幕墙清洁机器人主要有两种结构形式:一种是吸附式结构202220215993.4、201710567889.5;另一种为卷扬升降式结构202210515674.x、202221731750.2。
3、采用吸附式的幕墙清洁机器人必须保证机器人能够时时有效的吸附在幕墙上,此类机器人机身与幕墙之间的距离一般都会保持在一个很小范围内,即吸附式幕墙清洁机器人的清洗能力局限于幕墙必须是相对平整的大面;而无法清洁建筑幕墙有横梁、竖梁,或者凹陷造型的幕墙,采用卷扬升降式的幕墙清洁机器人则是依靠于卷扬系统的升降完成幕墙清洁清洁动作的移动,清洗机构的执行末端不够灵活,这也限制了此类机器人的清洗作业范围。
4、上述两种幕墙清洁机器人存在的共同的问题就是清洗作业面受很大的限制,只能清洁相对平整且无其他异形障碍阻挡的幕墙面,然而随着人们对审美的提高,建筑物也越来越趋于形式多样化、外观造型复杂化,现有幕墙清洁机器人的清洁能力是无法满足显示建筑幕墙清洁的需求。
技术实现思路
1、针对现有技术的不足,本发明提供了一种新型幕墙清洁机器人及其清洁方法,解决了清洗面受限,清洗效果差的技术问题。
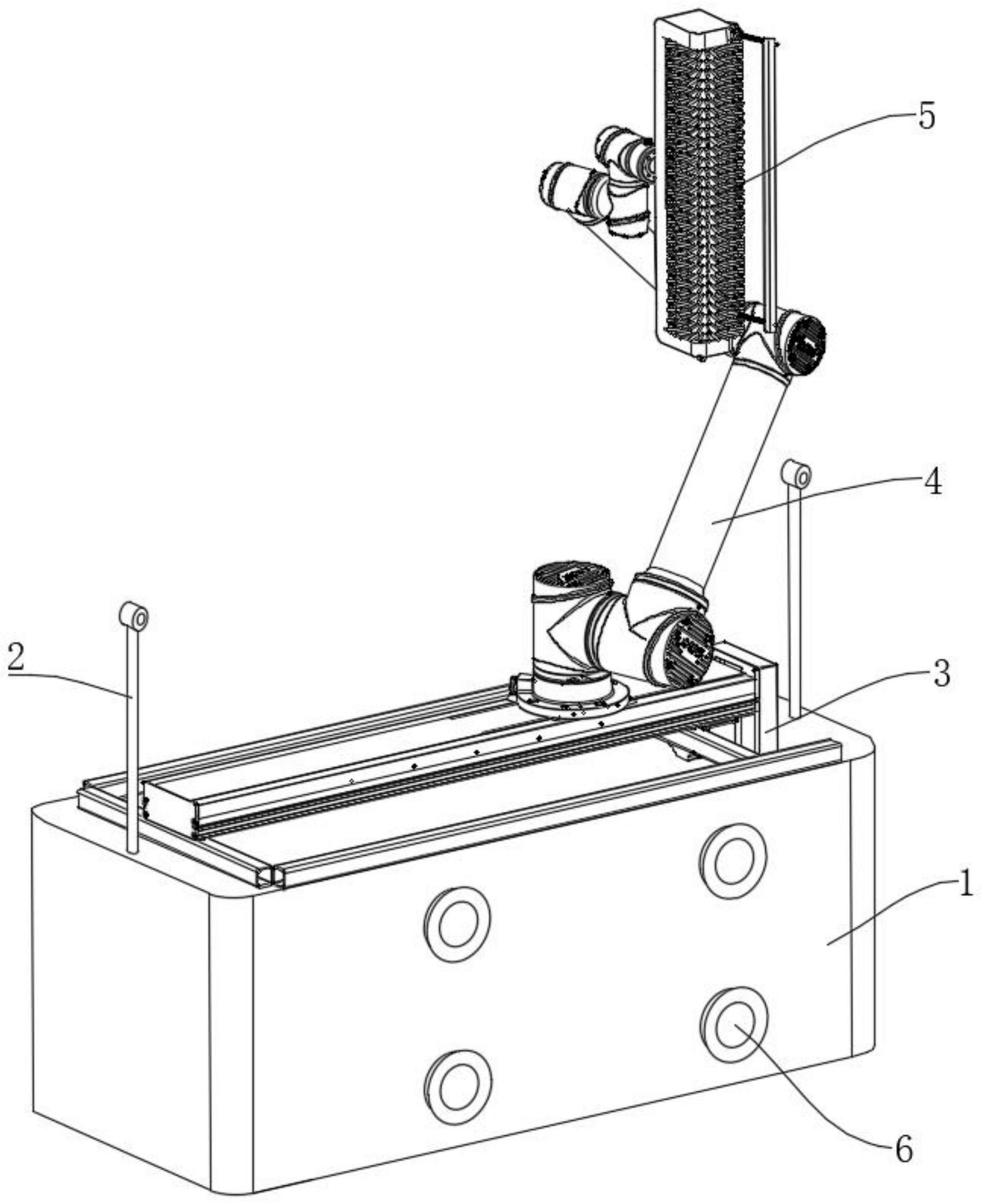
2、为解决上述技术问题,本发明提供了如下技术方案:一种新型幕墙清洁机器人及其清洁方法,包括吊篮,所述吊篮的顶壁两侧对称固定安装有吊耳,所述吊耳的顶端安装在卷扬系统的吊绳上,所述吊篮的顶部固定连接有电气拖链,所述电气拖链的上端设有组合式调节机构,所述组合式调节机构的顶部设有自动清洗机构,所述吊篮的内部设有驱动控制机构;
3、所述组合式调节机构包括滑动安装在电气拖链顶端的水平滑块,所述水平滑块的上端固定连接有六轴机械臂,所述六轴机械臂的顶端固定连接有固定盘;
4、所述自动清洗机构包括固定连接在固定盘端部的连接法兰,所述连接法兰的末端固定安装有刷盘,所述刷盘的内部转动安装有清洗刷,所述刷盘的侧壁且位于清洗刷的旁侧对称固定连接有撑杆,所述撑杆的末端固定连接有刮板。
5、优选的,所述驱动控制机构包括滑动安装在吊篮侧壁四个拐角处的吸盘,所述吸盘位于靠近清洗刷的一侧,所述吊篮背离吸盘的侧壁对称固定安装有两个网罩,所述吊篮的内壁中心固定连接有气缸,气缸位于两个所述网罩的中心,所述吊篮的内壁且位于气缸的下方固定连接有电机;
6、所述电机的输出端固定连接有主动轴,所述主动轴的外侧套接有传动带,所述,所述网罩的内侧转动安装有从动轴,从动轴靠近网罩的端部固定连接有扇叶,传动带的左右两侧均套接在从动轴上,所述气缸的输出端固定连接有滑杆。
7、优选的,所述滑杆的左右两侧均设有压力反馈机构,所述滑杆的末端固定连接有撑板,撑板的外侧壁四个拐角处均固定连接有活动杆,活动杆的末端固定连接在吸盘上;
8、所述压力反馈机构包括对称固定连接在气缸侧壁的两个套筒,套筒的内部均滑动安装有横移杆,所述横移杆的顶壁和底壁均固定连接有球形导电块;
9、所述套筒的内壁顶部和底部均固定连接有多个弹性限位件,多个所述弹性限位件沿套筒的横向等距设置,所述弹性限位件的左侧壁均固定连接有第一导电触片,所述弹性限位件的右侧壁均固定连接有第二导电触片;
10、所述第一导电触片和第二导电触片对称设置在弹性限位件的两侧,所述第一导电触片和第二导电触片均设置为弧形导电材质,且弧长的长度值为1/6π。
11、一种新型幕墙清洁机器人的清洁方法,包括如下步骤:
12、s1、幕墙清洁施工过程中,首先将天台卷扬系统固定好,吊篮在地面;卷扬系统由地面操作人员手动下降至地面,待操作人员将卷扬线缆安装在吊篮上后切换为自动模式,卷扬系统自动将吊篮升高至幕墙清洁的最高点,吊篮自身识别判断清洗位置和清洁范围,然后开始自动清洗作业;
13、s2、自动清洗作业时,卷扬系统能够自动确认的初始下降过程中的下降距离,吊篮在幕墙的初始高度位置,气缸带动盘吸盘自动前伸,扇叶同时正转产生吊篮靠近幕墙方向的辅助推力,吸盘接触幕墙过程中,球形导电块和第一导电触片逐个接触通电,使得各个弹性限位件左侧发生挤压形变,当接触幕墙时,不再移动,球形导电块和第一导电触片稳定通电,触片通电吸盘停止前伸、扇叶停止转动,此时吊篮处于相对稳定状态,机械臂开始运行至作业位姿,机械臂已提前调试好固定的升降位姿和作业位姿;
14、s2、自动清洗作业时,卷扬系统能够自动确认的初始下降过程中的下降距离,吊篮在幕墙的初始高度位置,气缸带动盘吸盘自动前伸,扇叶同时正转产生吊篮靠近幕墙方向的辅助推力,吸盘接触幕墙过程中,球形导电块和第一导电触片逐个接触通电,使得各个弹性限位件左侧发生挤压形变,当接触幕墙时,不再移动,球形导电块和第一导电触片稳定通电,触片通电吸盘停止前伸、扇叶停止转动,此时吊篮处于相对稳定状态,机械臂开始运行至作业位姿,机械臂已提前调试好固定的升降位姿和作业位姿;
15、s3、清洗完成后机械臂由作业位姿返回至升降位姿,吸盘负压解除,扇叶反转产生原理幕墙方向的推力,吸盘脱离幕墙后电缸缩回,此时球形导电块和第二导电触片接触通电,驱动电机带动扇叶反转保持吊篮与幕墙的安全距离,此时吊篮脱离了相对稳定状态可以进行升降,卷扬系统调整吊篮至下一个工位高度,吊篮再次开始调平动作,依此重复进行完成卷扬系统第一个位置下的所有清洁工作,然后卷杨系统经人工或者自动调整至下一个位置,完成后续的清洁工作;
16、s4、特殊的,当建筑幕墙有横向凸出或凹陷、竖向凸出或凹陷造型结构时,机械臂清洗完横竖向造型结构的一侧幕墙后,可以后退至安全位置,然后下降或平移至横竖向造型结构的另一侧,依托定位传感器的精准定位,清洗工具可以沿着横竖向造型结构的另一侧边缘,然后向靠近幕墙方向移动,然后完成横竖向造型结构的另一侧幕墙清洗,基于此种结构形式和清洗方案,大大提高了幕墙清洁机器人的适用性,可以满足多种幕墙结构类型的清洁需求;
17、s5、幕墙清洁机器人向下移动更换作业位置时,按照上述s3调整方式将吊篮移动至下一个工作位置,然后真空吸盘向靠近幕墙方向伸出,按照上述s2的动作逻辑完成吊篮的机身的稳定吸附,至此吊篮也完成了建筑横向造型结构的跨越,避免了吸盘不易吸附的现象,进一步增强了幕墙清洁机器人的适用性。
18、借由上述技术方案,本发明提供了一种新型幕墙清洁机器人及其清洁方法,至少具备以下有益效果:
19、1、本发明通过采用组合式七轴机械臂的形式,可以完成自动越障的功能、即能够适应大尺寸玻璃框架、建筑横梁、竖梁等基本建筑结构幕墙清洁的施工需求。
20、2、本发明通过安装有真空吸盘,结合推力扇叶,能够有效的稳定机身,显著提高了幕墙清洁机器人的高空安全性。
21、3、本发明通过压力反馈机构朝着墙体一侧移动实现对吸盘吸附的稳定限位,同时通过横移杆、球形导电块和第一导电触片之间的配合设置,实现吸盘吸附墙体后的压力反馈,达到了扇叶停止转动的效果,减少了吊篮过量移动导致的倾覆风险。
22、4、本发明通过压力反馈机构朝着远离墙体一侧移动实现清洗位置的快速调整,同时通过横移杆、球形导电块和第二导电触片之间的配合设置,实现对吸盘解除吸附墙体后的扇叶翻转,有效减少了吊篮远离墙体的时长,进一步提高了清洗效率。
- 还没有人留言评论。精彩留言会获得点赞!