清洁方法、清洁展示方法、清洁设备和存储介质与流程
本技术涉及智能清洁,更具体而言,涉及一种清洁方法、清洁展示方法、清洁设备、计算机程序产品和非易失性计算机可读存储介质。
背景技术:
1、随着人们生活节奏的加快,扫地机器人在实际生活中扮演的角色越来越重要,传统的扫地机器人的控制方式需要用户使用遥控器进行控制(如通过安装在手机上的控制扫地机器人的应用程序,并在应用程序上手动规划清扫区域),在对需要清扫的位置进行清洁时,手动规划操作较为繁琐,清洁效率低。
技术实现思路
1、本技术实施方式提供一种清洁方法、清洁展示方法、清洁设备、计算机程序产品和非易失性计算机可读存储介质。
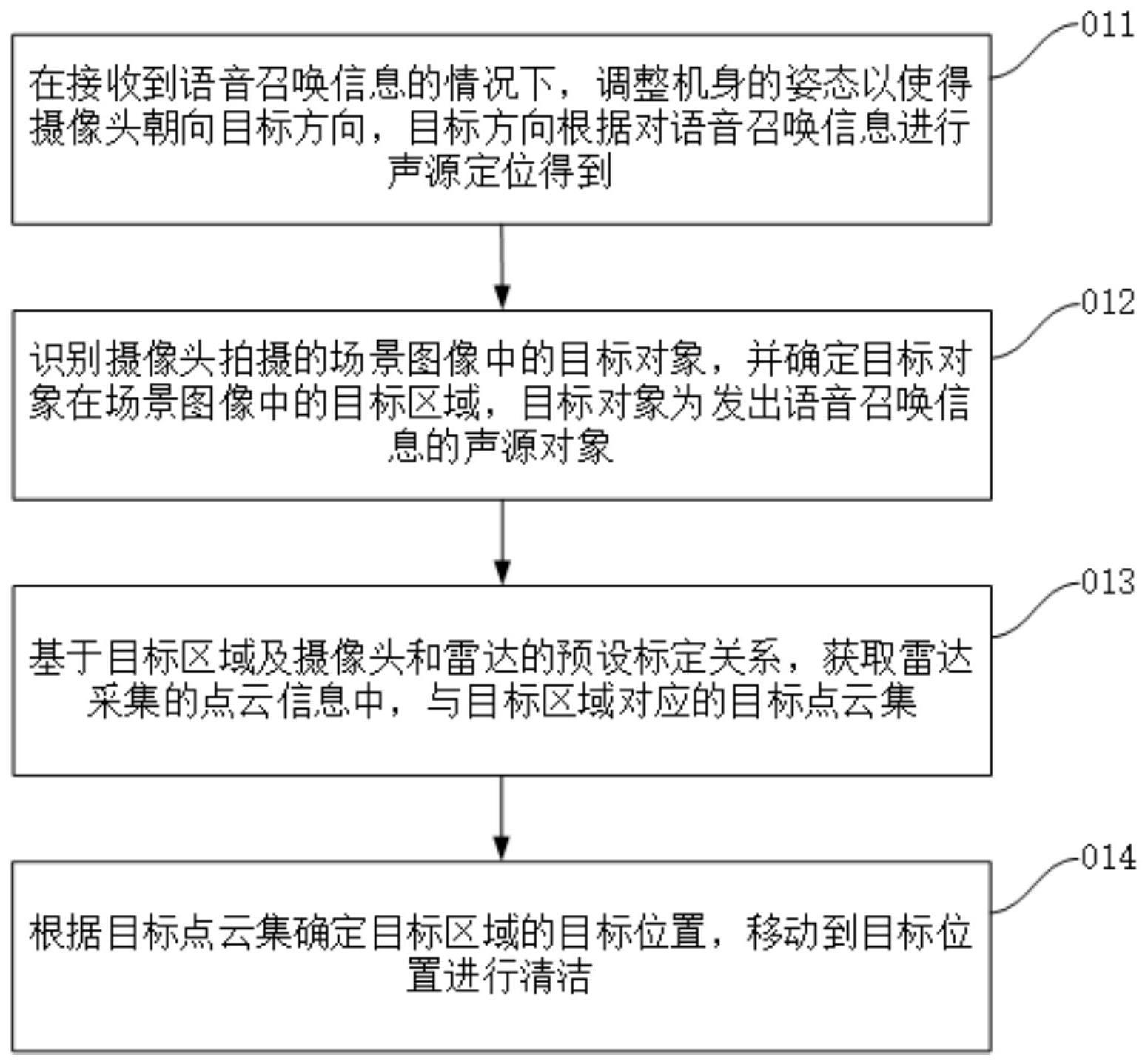
2、本技术实施方式的清洁方法应用于清洁设备,所述清洁设备包括机身和设于所述机身的摄像头及雷达,所述清洁方法包括在接收到语音召唤信息的情况下,调整所述机身的姿态以使得所述摄像头朝向目标方向,所述目标方向根据对所述语音召唤信息进行声源定位得到;识别所述摄像头拍摄的场景图像中的目标对象,并确定所述目标对象在所述场景图像中的目标区域,所述目标对象为发出所述语音召唤信息的声源对象;基于所述目标区域及所述摄像头和所述雷达的预设标定关系,获取所述雷达采集的点云信息中,与所述目标区域对应的目标点云集;根据所述目标点云集确定所述目标区域的目标位置,移动到所述目标位置进行清洁。
3、在某些实施方式中,所述清洁设备还包括音频采集组件,所述音频采集组件包括多个音频采集部件,所述音频采集部件用于采集所述语音召唤信息,所述方法还包括:根据各个所述音频采集部件采集到所述语音召唤信息的时间,进行声源定位,以确定所述声源对象所在的所述目标方向及所述声源对象和所述清洁设备之间的预估距离;断所述预估距离是否大于预设阈值;若是,则进入所述识别所述摄像头拍摄的场景图像中的目标对象的步骤;若否,则沿所述目标方向远离所述目标对象移动目标距离,以使得所述声源对象和所述清洁设备之间的距离大于所述预设阈值,并在移动完成后进入所述识别所述摄像头拍摄的场景图像中的目标对象的步骤;其中,所述目标距离是根据所述预估距离和所述预设阈值确定。
4、如此,通过清洁设备机身上的音频采集组件接收语音召唤信息,并进行声源定位,能够确定用户相对于自移动机器正对方向的所在方向以及用户与清洁设备之间的预估距离,从而能够确定清洁设备需要调整的姿态,使得摄像头面向用户,以及用户与清洁设备之间大概的距离。再通过对用户与清洁设备之间大概的距离进行判断,并在清洁设备与用户靠的太近的情况下,移动清洁设备远离用户,从而能够使得清洁设备摄像头尽量能够拍到用户的全身,方便后续进行人体识别。
5、在某些实施方式中,在所述基于所述目标区域及所述摄像头和所述雷达的预设标定关系,获取所述雷达采集的点云信息中,与所述目标区域对应的目标点云集的步骤之前,所述清洁方法还包括调整所述机身的姿态,以使得所述目标区域的中心位于所述场景图像中的预设位置。
6、如此,摄像头的朝向一般为扫地机器人的正前方,通过调整机身的姿态,使得目标区域位于场景图像的水平中间位置(如水平中间位置可以是场景图像中水平方向上的中间位置),从而使得扫地机器人的正前方对准用户,扫地机器人只需直走即可移动到用户所在的位置。
7、在某些实施方式中,所述根据所述目标点云集确定所述目标区域的目标位置包括:确定所述目标点云集中,各个点云与所述清洁设备之间距离值;确定各个距离值中的目标值,并确定所述目标值对应的目标点云,所述目标位置为所述目标点云对应的位置,所述目标值包括最小值、最大值、平均值和中位值的任一个。
8、如此,通过点云集确定各个点云与清洁设备之间的距离值,并确定多个距离值的最小值、最大值、平均值和中位值的任一个对应的目标点云,目标点云对应的位置为用户与清洁设备之间的位置,从而能够精准地确定用户与清洁设备之间的位置。并且在目标区域为框住人体的矩形框的情况下,使用多个距离值的中位值来确定目标点云,能够保证目标点云至少为人体上的点云,保证用户与清洁设备之间的位置确定准确性。而在目标区域为人体的轮廓围成的区域的情况下,使用多个距离值的最小值、最大值和中位值的任一个来确定目标点云,也能够保证目标点云至少为人体上的点云,保证用户与清洁设备之间的位置确定准确性。
9、在某些实施方式中,所述语音召唤信息包括普通清洁模式,所述方法还包括当所述语音召唤信息对应的清洁模式为所述普通清洁模式时,根据所述目标位置规划待清洁区域;在所述待清洁区域中规划清洁路径,并沿所述清洁路径移动以清洁所述待清洁区域。
10、如此,通过将清洁设备设置为普通清洁模式时,能够根据发出语音的位置确定的用户位置,从而确定待清洁区域,并且还能够确定清洁路径。
11、在某些实施方式中,所述语音召唤信息包括跟随清洁模式,所述方法还包括当所述语音召唤信息对应的清洁模式为所述跟随清洁模式时,根据连续多帧所述场景图像的所述目标区域对应的所述目标位置,跟随所述目标对象移动,以对所述目标对象的移动轨迹对应的区域进行清洁。
12、如此,通过将清洁设备设置为跟随清洁模式时,能够实现清洁设备跟随用户进行清洁的场景,相较于普通清洁模式,在场景中存在多个脏污的情况下,需要多次发出语音,清洁各个脏污所在的区域,操作繁琐,用户体验差而言,在跟随清洁模式下,只需要用户发出一次语音,清洁设备能够跟随用户清洁各个脏污所在的区域,操作简单。
13、本技术实施方式的清洁展示方法包括显示清洁设备在地图中的当前位置及姿态、以及发出语音召唤信息的目标对象,所述清洁设备的朝向所述目标对象,所述当前位置和姿态根据所述清洁设备的当前位姿信息确定;显示所述清洁设备从所述当前位置移动到所述目标对象对应的目标位置的实时移动路径。
14、如此,通过在显示屏上显示清洁设备在地图上的位姿、用户的位置、清洁设备相对用户的朝向和移动路径,能够通过显示屏清楚地了解清洁设备和用户各自的位置,清洁设备的姿态及两者的相对位置。
15、本技术实施方式的清洁设备包括处理器、存储器及计算机程序,其中,所述计算机程序被存储在所述存储器中,并且被所述处理器执行,所述计算机程序包括用于执行上述任一实施方式所述的清洁方法的指令。
16、本技术实施方式的计算机程序产品包括计算机程序,所述计算机程序包括用于执行上述任一实施方式所述的清洁展示方法的指令。
17、本技术实施方式的非易失性计算机可读存储介质包括计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行上述任一实施方式所述的清洁方法和执行上述任一实施方式所述的清洁展示方法。
18、本技术实施方式的清洁方法、清洁展示方法、清洁设备、计算机程序产品和非易失性计算机可读存储介质通过清洁设备在接收到用户发出的需要进行清扫的语音召唤信息的情况下,进行声源定位,确定用户(即声源)所在的方向,清洁设备自动调整机身的姿态,使得清洁设备机身上安装的摄像头朝向发出语音召唤信息的用户的方向,并且通过摄像头对用户所在的场景进行拍照,以得到场景图像。然后通过对场景图象进行识别,确定用户在场景图像中所在目标区域,并通过清洁设备机身上安装的雷达与摄像头预设的标定关系,获取雷达采集的点云信息中与用户在场景图像中的目标区域对应的目标点云集。之后再通过点云集确定用户所在的目标位置,并从当前位置移动到目标位置,最后即可对目标位置进行清洁。相较于通过用户发出的召唤清扫的声音,清洁设备确定用户的位置,以对用户所在位置进行清扫而言,不会因为环境噪音的干扰导致定位误差大,能够精确地控制清洁设备前往用户所在位置进行清扫。
19、本技术的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施方式的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!