一种基于无人机的面板清洁机器人及其控制方法
本发明涉及无人机,尤其是涉及一种基于无人机的面板清洁机器人及其控制方法。
背景技术:
1、目前高楼层外玻璃、太阳能光伏板、太阳能光热反光板等的清洁工作,主要通过工人作业完成,这种方法存在风险系数高,人力资源消耗大等问题。无人机清洁设备可以很好的对楼层玻璃或光伏面板进行清洁,但是现有的这类无人机结构复杂、只能通过控制无人机的上下升降对玻璃或面板进行清洁,清洁效果较差。
技术实现思路
1、本发明的目的在于提供一种基于无人机的面板清洁机器人及其控制方法,解决了人工清洁费时费力、效率低下的痛点。
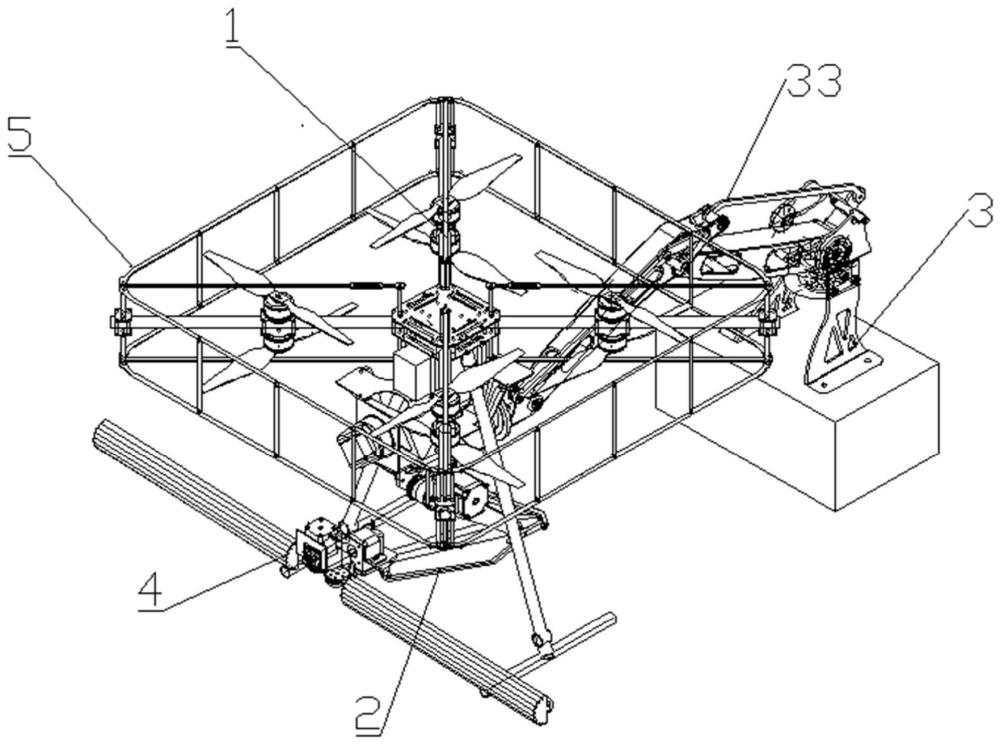
2、根据本发明的一个目的,本发明提供一种基于无人机的面板清洁机器人,包括:
3、无人机本体,用于提供升力和在高空作业中保持稳定性;
4、清洁机械臂,位于所述无人机本体底部,包括大臂和小臂,所述大臂和所述小臂铰接连接,所述小臂的前端设有清洁毛刷;
5、控制机构,用于控制所述清洁机械臂动作,通过所述清洁毛刷对面板进行清洁;
6、地面基站,与所述无人机本体无线连接,用于与所述无人机本体通信和控制。
7、进一步地,所述无人机本体采用四轴无人机结构,所述无人机本体采用碳纤维材料制成,所述无人机本体的外围设有防护网。
8、进一步地,所述无人机本体的底部设有固定基座,所述清洁机械臂设置在所述固定基座上,所述清洁机械臂包括大臂和小臂,所述大臂和所述小臂之间铰接连接,所述小臂的前端铰接连接有毛刷基座;
9、所述固定基座的下方设有安装架,所述安装架的顶部与所述固定基座之间通过转杆连接,所述转杆的端部设有第一齿轮,所述固定基座上固定有第一伺服电机,所述第一伺服电机的输出轴上设有第二齿轮,所述第二齿轮和所述第一齿轮啮合连接;
10、所述大臂与安装架铰接连接,所述安装架的两侧分别固定有第二伺服电机和第三伺服电机,所述大臂与所述安装架连接的铰接轴上固定有第三齿轮,所述第二伺服电机的输出轴上设有第四齿轮,所述第三齿轮和所述第四齿轮啮合连接;
11、所述安装架的内侧设有第五齿轮,所述第三伺服电机的输出轴上设有第六齿轮,所述第五齿轮和所述第六齿轮啮合连接,所述第五齿轮上固定有操作柄,所述操作柄和所述小臂之间设有连接杆,所述连接杆的一端与所述操作柄铰接连接,所述连接杆的另一端与所述小臂的末端铰接连接。
12、进一步地,所述大臂和小臂连接的铰接轴上固定有连接板,所述连接板的两端分别铰接连接有第一连杆和第二连杆,所述第一连杆的前端与所述小臂上的所述毛刷基座铰接连接,所述第二连杆的后端与安装架铰接连接。
13、进一步地,所述毛刷基座上固定有第四伺服电机,所述第四伺服电机的输出轴与u型基座连接,所述u型基座内侧铰接连接有两个刷杆,两个所述刷杆与所述u型基座的铰接轴上分别固定有第七齿轮和第八齿轮,所述第七齿轮和所述第八齿轮啮合连接,所述u型基座上固定有第五伺服电机,所述第五伺服电机的输出轴与所述第七齿轮或所述第八齿轮连接,两个所述刷杆在0°~270°的范围内转动。
14、进一步地,两个所述刷杆的外侧分别开设有卡槽,所述卡槽内卡接连接有刷头。
15、进一步地,所述地面基站设有充电机械臂,所述充电机械臂的头端设有充电头,所述充电头设有充电线圈,所述充电头上还设有电磁铁,所述充电头通过无线充电的方式为所述无人机本体充电。
16、进一步地,所述无人机本体上设有三维激光雷达、视觉摄像头和上位机嵌入式计算机,所述地面基站的下位机单片机。
17、根据本发明的另一个目的,本发明提高上述一种基于无人机的面板清洁机器人的控制方法,包括如下步骤:
18、步骤一,所述无人机本体通过所述三维激光雷达与所述视觉摄像头完成数据采集;
19、步骤二,所述上位机嵌入式计算机对数据计算分析,利用所述三维激光雷达采集的点云数据,实现识别墙体或太阳能板,同时根据所述视觉摄像头采集的图片数据,识别污渍区域与判断清洁效果,并规划路径控制所述无人机本体移动;
20、步骤三,所述无人机本体与所述地面基站的所述下位机单片机通讯,由所述下位机单片机进一步控制所述清洁机械臂动作。
21、进一步地,具体包括如下步骤:
22、s1,三维激光雷达进行数据采集
23、所述无人机本体搭载的所述三维激光雷达获取三维点云数据,所述无人机本体通过激光束扫描周围环境,生成点云;
24、s2,数据预处理
25、去除地面点云,只保留位于地面以上的点云数据,采用高度阈值来实现,对点云进行滤波和降采样,以减少数据量和噪声;
26、s3,分割平面
27、使用分割算法,对处理后的点云进行平面分割,检测到的平面代表墙壁、太阳能玻璃板;
28、s4,特征提取和分类
29、对于每个检测到的平面,提取其特征,如法向量、颜色信息;使用机器学习算法,对提取的特征进行分类,以确定平面物体的类型;
30、s5,清洁路径规划
31、s501,目标覆盖区域定义
32、确定需要覆盖的平面区域的边界和范围;
33、s502,路径规划算法选择
34、选择适合的应用的路径规划算法,包括:
35、最短路径算法,dijkstra或a*,可用于快速覆盖平面;
36、dubins路径规划算法,适用于有限曲率的移动;
37、人工势场法,避开障碍物并导航到目标;
38、遗传算法或基于优化的方法,用于复杂环境或多个目标;
39、s503,避障考虑
40、使用传感器数据来及时检测和避免障碍物;
41、s504,路径可视化和调整
42、将规划的路径可视化在地图上,以便检查路径是否满足要求;
43、s505,路径执行和监控
44、将规划好的路径加载到无人机的飞行控制系统中,并确保所述无人机本体能够按计划飞行,使用实时传感器数据来监控无人机本体的位置和姿态,以及覆盖到的平面区域;
45、s506,路径跟踪和修正
46、在执行路径时遇到风或其他外部干扰因素,所述无人机本体进行路径修正,以确保平面覆盖的质量和完整性;
47、s6,视觉摄像头的数据采集
48、获取包含潜在污渍的彩色图像;
49、s7,预处理
50、对图像进行预处理以增强污渍的可见性;
51、s8,特征提取
52、提取图像中用于污渍识别的特征,颜色、纹理、形状;使用特征提取技术,局部二值模式或色彩直方图来描述图像中的局部特征;
53、s9,污渍检测
54、使用分类器,支持向量机或深度学习卷积神经网络,将提取的特征与已知污渍和非污渍的样本进行训练,用训练好的分类器对新的图像进行分类,以检测污渍的存在;
55、s10,在确定清洁目标与清洁区域后,由所述上位机嵌入式计算机发送控制命令,控制所述无人机本体移动与所述下位机单片机控制所述清洁机械臂完成擦洗、折叠刷头操作。
56、本发明技术方案基于无人机的面板清洁机器人,解决了人工清洁费时费力、效率低下的痛点,实现了无人值守管理,可实现自主清洁面板,以达到更好地清洁的目的,无需人工控制,实现无人工值守持续自主作业。
- 还没有人留言评论。精彩留言会获得点赞!