基于计算机视觉的扫地机器人回充方法与流程
本发明涉及图像数据处理,具体涉及基于计算机视觉的扫地机器人回充方法。
背景技术:
1、扫地机器人所使用的是容量有限的移动电源,需要进行反复的充电,最常用的技术手段是结合红外、雷达、蓝牙以及图像等数据对扫地机器人进行引导与充电座对接充电,但是因为红外、雷达以及蓝牙的发射编码信号的距离短,存在遮挡或清扫环境较大时,扫地机器人检测引导信号的时间就会增加,在回充途中耗电较大,可能发生途中电量耗尽而搁浅的情况。
2、现有技术中利用扫地机器人清扫过程中所获取的环境图像与回充途中所获取的图像进行特征点检测并进行一一匹配来引导扫地机器人的前进方向,但是匹配过程中由于扫地机器人的视角变化或相机抖动导致图像匹配结果不准确,导致扫地机器人回充过程中出现前进方向偏移的情况。
技术实现思路
1、本发明提供基于计算机视觉的扫地机器人回充方法,以解决现有的问题。
2、本发明的基于计算机视觉的扫地机器人回充方法采用如下技术方案:
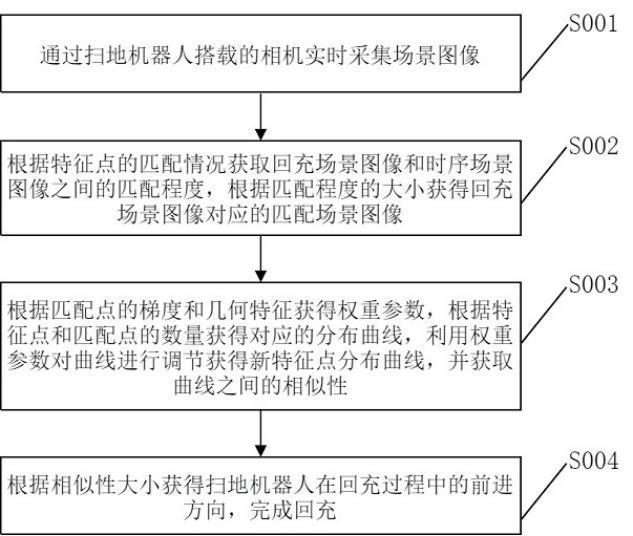
3、本发明一个实施例提供了基于计算机视觉的扫地机器人回充方法,该方法包括以下步骤:
4、获取扫地机器人在进行打扫工作时采集的且按照时间顺序排列的场景图像,记为时序场景图像;将扫地机器人在回充时当前时刻下采集的场景图像记为回充场景图像;将时序场景图像和回充场景图像统称为场景图像;
5、预设多个不同大小的截止频率对场景图像进行滤波获得若干个高斯场景图像;获取任意场景图像中的若干个特征点,将回充场景图像与任意时序场景图像进行匹配,根据匹配点数量的大小获得回充场景图像对应的匹配场景图像,所述匹配点为构成匹配关系的特征点;
6、获取任意匹配点在若干个高斯场景图像中的hu矩和梯度值,根据梯度值、梯度值的分布情况以及hu矩的分布情况获得匹配点的权重参数;根据场景图像中每一列包含特征点和匹配点的数量分别获得特征点分布曲线和匹配点分布曲线;将特征点分布曲线和匹配点分布曲线之间的差异以及权重参数进行融合,获得特征点分布曲线的偏移调整参数;利用偏移调整参数对特征点分布曲线进行调节获得场景图像的新特征点分布曲线,获取回充场景图像与匹配场景图像的新特征点分布曲线之间的相似性;
7、根据相似性大小获得扫地机器人在回充过程中的前进方向。
8、进一步的,所述预设多个不同大小的截止频率对场景图像进行滤波获得若干个高斯场景图像,包括的具体方法为:
9、预设初始截止频率以步长a迭代增加到b,获得若干个截止频率,利用所有截止频率分别对任意一个场景图像进行高斯高通滤波,获得场景图像对应的若干个高斯场景图像,一个高斯场景图像对应一个截止频率,其中a和b均为预设的超参数。
10、进一步的,所述将回充场景图像与任意时序场景图像进行匹配,根据匹配点数量的大小获得回充场景图像对应的匹配场景图像,包括的具体方法为:
11、首先,利用sift算法获取任意场景图像中的若干个特征点,并利用sift算法将回充场景图像与任意时序场景图像进行匹配,将构成匹配关系的特征点记为匹配点,一个匹配点对应一个场景图像,一个场景图像对应若干个高斯场景图像;
12、然后,将回充场景图像与时序场景图像之间未构成匹配关系的特征点的数量记为数值w1,将数值w1与匹配点的数量相加获得数值w2,将匹配点的数量与数值w2的比值记为回充场景图像与时序场景图像之间的匹配程度;
13、最后,获取回充场景图像与所有时序场景图像的匹配程度最大时对应的时序场景图像,记为回充场景图像对应的匹配场景图像。
14、进一步的,所述获取任意匹配点在若干个高斯场景图像中的hu矩和梯度值,包括的具体方法为:
15、获取任意匹配点在对应场景图像中的坐标,记为匹配点的位置信息;在相同位置信息下的若干个高斯场景图像中,获取以匹配点为中心的预设局部范围内的hu矩,并通过sobel算子获取匹配点在若干个高斯场景图像中的梯度值,一个匹配点对应若干个hu矩和梯度,一个匹配点在一个高斯场景图像中对应一个hu矩和一个梯度值,一个hu矩包含7个不变矩。
16、进一步的,所述根据梯度值、梯度值的分布情况以及hu矩的分布情况获得匹配点的权重参数,包括的具体方法为:
17、获取任意匹配点的权重参数,具体计算方法为:
18、;
19、其中,γ表示匹配点的权重参数;di表示第i个高斯场景图像的截止频率;ti表示匹配点在相同位置信息下的第i个高斯场景图像中的梯度值;σt表示匹配点在相同位置信息下的所有高斯场景图像中对应梯度值的标准差;σha表示匹配点在相同位置信息下的所有高斯场景图像中对应hu矩的第a个不变矩的标准差;i表示高斯场景图像的数量;exp( )表示以自然常数为底数的指数函数。
20、进一步的,所述根据场景图像中每一列包含特征点和匹配点的数量分别获得特征点分布曲线和匹配点分布曲线,包括的具体方法为:
21、获取场景图像的列数,将任意一列的列数与场景图像的列数的比值记为第一数值,将第一数值与360°的乘积结果记为对应列的列角度;分别获取回充场景图像与对应的匹配场景图像内任意一列所包含的特征点的数量,获得所有列对应的特征点的数量,构建二维直角坐标系,以列角度为横坐标,以特征点的数量作为纵坐标,将回充场景图像与对应的匹配场景图像内所有列对应的特征点的数量分别置于二维直角坐标系中,获得回充场景图像与匹配场景图像对应的散点图,利用最小二乘法对散点图中的散点进行曲线拟合,将获得的曲线记为特征点分布曲线,回充场景图像与匹配场景图像分别对应一个特征点分布曲线;
22、根据每一列所包含匹配点的数量获取回充场景图像与匹配场景图像分别对应的匹配点分布曲线,所述匹配点分布曲线的获取方法与特征点分布曲线的获取方法相同。
23、进一步的,所述将特征点分布曲线和匹配点分布曲线之间的差异以及权重参数进行融合,获得特征点分布曲线的偏移调整参数,包括的具体方法为:
24、获取特征点分布曲线的偏移调整参数,具体计算方法为:
25、;
26、其中,εθ表示特征点分布曲线中第θ个列角度下的偏移调整参数;f1θ表示特征点分布曲线中第θ个列角度下的数值;f2θ表示匹配点分布曲线中第θ个列角度下的数值;γθb表示回充场景图像或匹配场景图像中第θ个列角度所对应列内的第b个匹配点的权重参数;b表示回充场景图像或匹配场景图像中第θ个列角度所对应列内所包含匹配点的数量;e表示自然常数。
27、进一步的,所述利用偏移调整参数对特征点分布曲线进行调节获得场景图像的新特征点分布曲线,包括的具体方法为:
28、新特征点分布曲线的具体获取方法为:
29、
30、其中,fθ表示新特征点分布曲线中第θ个列角度下的数值;εθ表示特征点分布曲线中第θ个列角度下的偏移调整参数;f1θ表示特征点分布曲线中第θ个列角度下的数值;sigmoid( )表示sigmoid归一化函数。
31、进一步的,所述获取回充场景图像与匹配场景图像的新特征点分布曲线之间的相似性,包括的具体方法为:
32、通过新特征点分布曲线的获取方法,获得回充场景图像与匹配场景图像分别对应的新特征点分布曲线,将回充场景图像或匹配场景图像的新特征点分布曲线的首尾进行连接,形成一条环形的曲线记为环形分布曲线,获得回充场景图像与匹配场景图像分别对应的环形分布曲线,初始化回充场景图像与匹配场景图像的环形分布曲线的位置,使列角度为0°的位置相同,预设旋转角度步长为δθ,将回充场景图像的环形分布曲线进行顺时针旋转,当旋转角度大于等于360°时停止旋转,回充场景图像的环形分布曲线每旋转一次,获取回充场景图像的环形分布曲线与匹配场景图像的环形分布曲线之间的相似性,所述相似性为exp(-d),其中d表示回充场景图像的环形分布曲线与匹配场景图像的环形分布曲线之间的欧氏距离;exp( )表示以自然常数为底数的指数函数。
33、进一步的,所述根据相似性大小获得扫地机器人在回充过程中的前进方向,包括的具体方法为:
34、首先,获取相似性最大时回充场景图像的环形分布曲线已经旋转过的角度值,将-180°作为扫地机器人在当前时刻下的前进方向;
35、然后,扫地机器人根据回充过程中的前进方向进行前进,前进过程中不断利用对应时刻下的回充场景图像与时序场景图像进行匹配,获取对应时刻下的前进方向,在对应前进方向下前进直至回到充电仓中进行充电。
36、本发明的技术方案的有益效果是:通过获取扫地机器人在打扫过程和回充过程中对应场景图像中的特征点分布曲线,以描述场景图像特征,根据特征点在不同截止频率下的高斯图像中的梯度值和几何特征得到特征点的权重参数,以反映特征点对图像匹配结果准确性的影响程度,利用权重参数对特征点分布曲线进行调整,使特征点分布曲线的波峰更偏向于权重参数大的特征点所在位置,得到新特征点分布曲线,避免了特征点强弱不一对特征点分布曲线造成的影响,利用新特征点分布曲线之间的相似性获取扫地机器人的方向旋转角度,大大提高了扫地机器人回充过程中前进方向的准确性。
- 还没有人留言评论。精彩留言会获得点赞!