基于环境采集的玻璃幕墙自学习智能清洗机器人的制作方法
本发明涉及智能清洗机器人领域,尤其涉及基于环境采集的玻璃幕墙自学习智能清洗机器人。
背景技术:
1、随着城市现代化发展,特别是高层建筑的兴起,以玻璃壁而为代表的壁面结构逐渐演绎成华丽的“城市外衣”,山此衍生出繁重的壁面清洗任务,并且许多国家已对建筑壁面的清洗要求作出了明确规定。另一方面,越来越奇特的建筑结构使清洗的难度成倍增加,甚至采用传统的清洗方法已无能为力,因此人们期待新的具有人性化的清洗方式出现。现有智能清洗机器人由于结构稳定性不足导致智能清洗机器人的清洗效率以及工作性能的稳定性下降。
2、中国专利公开号:cn107717948a公开了基于android的玻璃幕墙智能清洗机器人,清洗机器人上装有控制模块、微型摄像头、水量传感器、无线通讯设备,所述清洗机器人通过微型摄像头采集外幕墙及视野环境的图像或视频信息,传感器采集清洗机器人内存水量数据以及清洁液量,并将图像或视频信息以及采集的数据通过内置的无线通讯设备以及网关设备传输给手机客户端,所述手机客户端通过android客户端界面模块接收清洗机器人发来的图像或视频信息以及传感器采集的数据,并通过显示屏显示清洗机器人内存水量,及清洁液量;用户通过手机客户端向清洗机器人中的控制模块传送操作控制指令,控制清洗机器人前行转弯移动清洗玻璃幕墙,并智能控制其蓄水。由此可见,所述基于android的玻璃幕墙智能清洗机器人存在由于机器人清洗角度过大以及电机转速多低导致机器人的清洗效率以及工作稳定性下降的问题。
技术实现思路
1、为此,本发明提供基于环境采集的玻璃幕墙自学习智能清洗机器人,用以克服现有技术中由于机器人清洗角度过大以及电机转速多低导致机器人的清洗效率以及工作稳定性下降的问题。
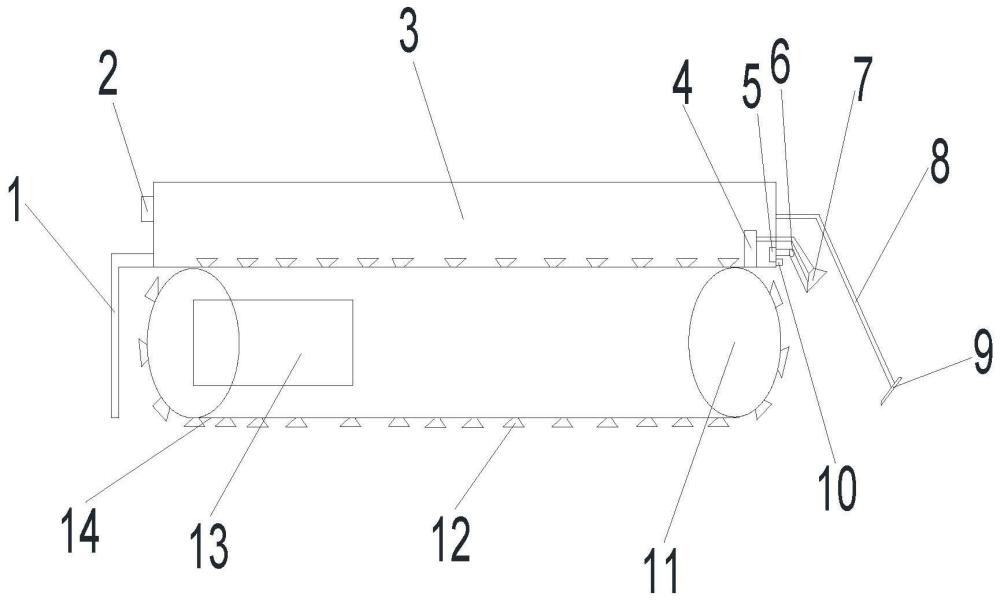
2、为实现上述目的,基于环境采集的玻璃幕墙自学习智能清洗机器人,其特征在于,包括:机器人主体;移动模块,其与所述机器人主体相连,用以对机器人主体的竖直位置进行调整,包括设置在机器人内部用以带动机器人主体进行位置移动的移动单元以及与所述移动单元相连用以提供移动单元的移动动力的动力电机;清洗模块,其与所述移动模块相连,用以对玻璃幕墙的不同区域进行清洗,包括与机器人主体相连用以对玻璃幕墙进行喷水的喷头、与所述喷头相连用以对喷头的喷射角度进行调节的旋转组件、与机器人主体相连用以对玻璃幕墙的透光率进行检测和对玻璃幕墙的皲裂位置进行确定的红外线感应器以及与所述机器人主体相连用以对当前清洗区域的实际湿度进行检测的湿度传感器;清洗角度控制模块,其与所述清洗模块相连,用以在根据玻璃幕墙的透光率判定清洗有效性低于允许范围时对清洗单元的清洗角度进行初次调节,或,发出对机器人主体结构的稳定性进行判定的第一控制信号,以及,在完成对于清洗角度的初次调节时根据玻璃幕墙的当前清扫位置处的实际湿度对清洗角度进行二次调节;电机控制模块,其分别与所述移动模块和清洗角度控制模块相连,用以在对所述第一控制信号产生响应且根据若干单位时间的清洗面积的方差判定机器人主体处于不稳定状态时对动力电机的转速进行初次调节,并在下一相邻运行周期根据若干运行周期内的清洗面积的平均值对所述动力电机的转速进行二次调节。
3、进一步地,所述清洗角度控制模块包括第一判定单元和与所述第一判定单元相连的第二判定单元,其中,
4、所述第一判定单元用以在玻璃幕墙的透光率触发预设第一透光率条件或预设第二透光率条件时判定清洗有效性低于允许范围;
5、所述第二判定单元用以在玻璃幕墙的透光率单独触发预设第二透光率条件时初步判定清洗的损失程度超出允许范围,并在当前清扫位置处的实际湿度触发预设湿度条件时二次判定清洗的损失程度超出允许范围。
6、进一步地,所述清洗角度控制模块还包括与所述第一判定单元相连的第一调节组件和与所述第二判定单元相连的第二调节组件,其中,
7、所述第一调节组件用以在清洗有效性低于允许范围时根据玻璃幕墙的透光率与预设透光率的差值对机器人的清洗角度进行初次调节,
8、所述第二调节组件用以在清洗的损失程度超出允许范围时根据当前清扫位置处的实际湿度与预设湿度的差值对机器人的清洗角度进行二次调节。
9、进一步地,所述预设第一透光率条件为,玻璃幕墙的透光率小于等于预设第一透光率;所述预设第二透光率条件为,玻璃幕墙的透光率大于预设第一比值且小于等于预设第二透光率;所述预设第一透光率小于所述预设第二透光率。
10、进一步地,所述机器人的清洗角度与玻璃幕墙的透光率的比值成反比,机器人的清洗角度与当前清扫位置处的实际湿度的比值成反比。
11、进一步地,所述电机控制模块包括第三判定单元和与所述第三判定单元相连的第四判定单元,其中,
12、第三判定单元用以在对所述第一控制信号产生响应且单位时间清洗面积的方差触发预设方差条件时判定机器人的稳定性低于允许范围;
13、所述第四判定单元用以在若干运行周期内的清洗面积的平均值触发预设平均值条件时判定清洗效率低于允许范围。
14、进一步地,所述预设方差条件为单位时间清洗面积的方差小于预设方差,所述预设平均值条件为若干运行周期内的清洗面积的平均值小于预设平均值。
15、进一步地,所述电机控制模块还包括与所述第三判定单元相连的第三调节单元,所述第三调节单元用以在机器人的稳定性低于允许范围时根据若干单位时间的清洗面积的方差与预设方差的差值对动力电机的转速进行初次调低。
16、进一步地,所述电机控制模块与第四判定组件相连接的第四调节单元,所述第四调节单元用以在清洗效率低于允许范围时根据若干运行周期内的清洗面积的平均值与预设平均值的差值对动力电机的转速进行二次调高。
17、进一步地,当所述红外线感应器输出的红外热像图上的对应位置出现热点特征,判定该对应位置处的玻璃幕墙发生皲裂。
18、与现有技术相比,本发明的有益效果在于,本发明通过设置机器人主体,移动模块、清洗模块、清洗角度控制模块以及电机控制模块,清洗角度控制模块根据幕墙玻璃的透光率对智能清洁机器人的清洗有效性进行判定并对机器人的清洗角度进行调节,并根据玻璃幕墙的水流量对机器人的清洗损失程度进行判定并对清洗角度进行二次调节,降低了清洗角度对机器人的清洗损失程度的影响,降低了机器人清洗角度对机器人的清洗有效性的影响,电机控制模块根据单位时间清洗面积的差值对清洗有效性进行判定并调节电机转速降低了电机转速对机器人清洗有效性的影响,进一步实现了提高玻璃幕墙的清洗效率以及清洗稳定性。
19、进一步地,本发明所述机器人通过对智能清洗机器人的清洗有效性进行判定,并根据玻璃幕墙的透光率低于允许范围对机器人的清洗角度进行调节,降低了由于对清洗角度的调节不准确导致对智能清洗机器人的清洗有效性的影响,进一步实现了提高玻璃幕墙的清洗效率以及清洗稳定性。
20、进一步地,本发明所述机器人通过在触发预设方差时对智能清洗机器人的清洗有效性进行二次判定,以及根据若干单位时间的清洗面积的方差低于允许范围对动力电机转速进行调节,降低了由于对动力电机转速的调节不准确导致的智能清洗机器人的稳定性的影响,进一步实现了提高玻璃幕墙的清洗效率以及清洗稳定性。
21、进一步地,本发明所述机器人通过对智能清洗机器人的清洗效率进行判定以及根据若干运行周期内的清洗面积的平均值对所述动力电机的转速进行二次调节,降低了由于对动力电机转速的调节不准确导致机器人清洗效率的影响,进一步实现了提高玻璃幕墙的清洗效率以及清洗稳定性。
22、进一步地,本发明所述机器人通过对机器人的清洗损失程度进行判定,并根据当前清扫位置处的实际湿度对机器人的清洗角度进行二次调节,降低了由于对清洗角度的调节不准确导致的清洗损失程度的影响,进一步实现了提高玻璃幕墙的清洗效率以及清洗稳定性。
- 还没有人留言评论。精彩留言会获得点赞!