扫地机及其防跌落方法、装置及存储介质与流程
本技术涉及扫地机领域,尤其涉及扫地机及其防跌落方法、装置及存储介质。
背景技术:
1、扫地机在执行清扫任务时,被清扫的场景中可能会存在悬崖等异常环境。比如在有楼梯的走廊进行清扫时,楼梯的台阶会被扫地机识别为悬崖。由于悬崖位置的落差较大,扫地机在悬崖位置容易发生跌落,甚至损坏扫地机。比如,扫地机在楼梯位置清扫时,如果未能有效识别悬崖位置,则有可能从楼梯间跌落,甚至损坏扫地机。
2、为了避免跌落悬崖而损坏扫地机,可以在扫地机上安装悬崖传感器,执行任务过程中,通过悬崖传感器检测扫地机是否处于悬崖位置,从而能够及时的降低扫地机被损坏的几率,但是由于扫地机缺少有效的退出悬崖的控制方法,不利于有效的继续执行任务。
技术实现思路
1、有鉴于此,本技术实施例提供了一种扫地机及其防跌落方法、装置及存储介质,以解决现有技术中的扫地机缺少有效的退出悬崖的控制方法,不利于有效的继续执行任务的问题。
2、本技术实施例的第一方面提供了一种扫地机的防跌落方法,扫地的前侧设置有悬崖传感器,所述扫地机包括用于控制扫地机的主动轮旋转的电机,所述电机通过电机控制模块分别与悬崖传感器和运动控制模块相连,所述方法包括:
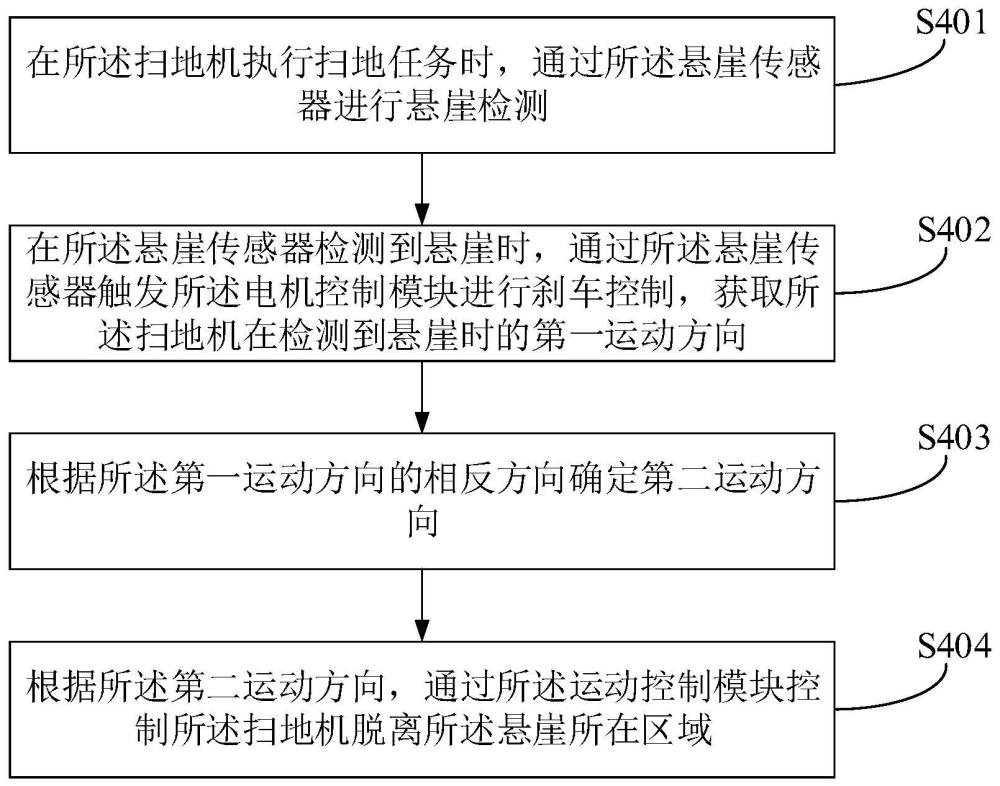
3、在所述扫地机执行扫地任务时,通过所述悬崖传感器进行悬崖检测;
4、在所述悬崖传感器检测到悬崖时,通过所述悬崖传感器触发所述电机控制模块进行刹车控制,获取所述扫地机在检测到悬崖时的第一运动方向;
5、根据所述第一运动方向的相反方向确定第二运动方向;
6、根据所述第二运动方向,通过所述运动控制模块控制所述扫地机脱离所述悬崖所在区域。
7、结合第一方面,在第一方面的第一种可能实现方式中,在所述悬崖传感器检测到悬崖时,所述方法还包括:
8、获取所述扫地机在检测到悬崖时的栅格位置;
9、在所述栅格地图中标记所述栅格位置为悬崖位置。
10、结合第一方面的第一种可能实现方式,在第一方面的第二种可能实现方式中,在所述栅格地图中标记所述栅格位置为悬崖位置,包括:
11、根据检测到悬崖信号的悬崖传感器在所述扫地机中的方位,结合所述扫地机的位姿,标定所述悬崖在所述栅格地图中的位置。
12、结合第一方面,在第一方面的第三种可能实现方式中,根据所述第一运动方向的相反方向确定第二运动方向,包括:
13、当所述第一运动方向为向前的运动方向时,确定所述第二运动方向为向后运动的方向;
14、当所述第一运动方向为第一旋转方向时,确定所述第二运动方向为第二旋转方向,所述第二旋转方向与第一旋转方向相反。
15、结合第一方面的第三种可能实现方式,在第一方面的第四种可能实现方式中,根据所述第二运动方向控制所述扫地机脱离所述悬崖所在区域,包括:
16、当所述第一运动方向为顺时针方向,且仅有右侧的悬崖传感器检测到悬崖时,停止顺时针方向旋转并控制所述扫地机按照逆时针方向旋转;
17、在检测到所述悬崖传感器的悬崖检测信号消失时,停止逆时针方向旋转并向当前时刻的前方移动预定距离。
18、结合第一方面的第三种可能实现方式,在第一方面的第五种可能实现方式中,根据所述第二运动方向控制所述扫地机脱离所述悬崖所在区域,包括:
19、当所述第一运动方向为逆时针方向,且仅有左侧的悬崖传感器检测到悬崖时,停止逆时针方向旋转并控制所述扫地机按照顺时针方向旋转;
20、在检测到所述悬崖传感器的悬崖检测信号消失时,停止顺时针方向旋转并向当前时刻的前方移动预定距离。
21、结合第一方面的第四种或第五种可能实现方式,在第一方面的第六种可能实现方式中,在向当前时刻的前方移动预定距离之后,所述方法还包括:
22、在向当前时刻的前方移动的过程中,如果移动距离小于预定距离,且检测到悬崖时,则向当前方向的反方向移动;
23、在朝当前方向的反方向移动预定距离之前检测到悬崖,则生异常提醒。
24、本技术第二方面提供了一种扫地机的防跌落装置,扫地的前侧设置有悬崖传感器,所述扫地机包括用于控制扫地机的主动轮旋转的电机,所述电机通过电机控制模块分别与悬崖传感器和运动控制模块相连,所述装置包括:
25、悬崖检测单元,用于在所述扫地机执行扫地任务时,通过所述悬崖传感器进行悬崖检测;
26、第一运动方向确定单元,用于在所述悬崖传感器检测到悬崖时,通过所述悬崖传感器触发所述电机控制模块进行刹车控制,获取所述扫地机在检测到悬崖时的第一运动方向;
27、第二运动方向确定单元,用于根据所述第一运动方向的相反方向确定第二运动方向;
28、悬崖脱离单元,用于根据所述第二运动方向,通过所述运动控制模块控制所述扫地机脱离所述悬崖所在区域。
29、结合第二方面,在第二方面的第一种可能实现方式中,所述装置还包括:
30、栅格位置获取单元,用于获取所述扫地机在检测到悬崖时的栅格位置;
31、悬崖位置标记单元,用于在所述栅格地图中标记所述栅格位置为悬崖位置。
32、结合第二方面的第一种可能实现方式,在第二方面的第二种可能实现方式中,所述悬崖位置标记单元用于:
33、根据检测到悬崖信号的悬崖传感器在所述扫地机中的方位,结合所述扫地机的位姿,标定所述悬崖在所述栅格地图中的位置。
34、结合第二方面,在第二方面的第三种可能实现方式中,所述第二运动方向确定单元包括:
35、第一方向确定子单元,用于当所述第一运动方向为向前的运动方向时,确定所述第二运动方向为向后运动的方向;
36、第二方向确定子单元,用于当所述第一运动方向为第一旋转方向时,确定所述第二运动方向为第二旋转方向,所述第二旋转方向与第一旋转方向相反。
37、结合第二方面的第三种可能实现方式,在第二方面的第四种可能实现方式中,所棕悬崖脱离单元包括:
38、第一旋转控制子单元,用于当所述第一运动方向为顺时针方向,且仅有右侧的悬崖传感器检测到悬崖时,停止顺时针方向旋转并控制所述扫地机按照逆时针方向旋转;
39、第一向前控制子单元,用于在检测到所述悬崖传感器的悬崖检测信号消失时,停止逆时针方向旋转并向当前时刻的前方移动预定距离。
40、结合第二方面的第三种可能实现方式,在第二方面的第五种可能实现方式中,所述悬崖脱离单元包括:
41、第二旋转控制子单元,用于当所述第一运动方向为逆时针方向,且仅有左侧的悬崖传感器检测到悬崖时,停止逆时针方向旋转并控制所述扫地机按照顺时针方向旋转;
42、第二向前控制子单元,用于在检测到所述悬崖传感器的悬崖检测信号消失时,停止顺时针方向旋转并向当前时刻的前方移动预定距离。
43、结合第二方面的第四种或第五种可能实现方式,在第二方面的第六种可能实现方式中,所述装置还包括:
44、反向移动单元,用于在向当前时刻的前方移动的过程中,如果移动距离小于预定距离,且检测到悬崖时,则向当前方向的反方向移动;
45、提醒单元,用于在朝当前方向的反方向移动预定距离之前检测到悬崖,则生异常提醒。
46、本技术实施例的第三方面提供了扫地机,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一项所述方法的步骤。
47、本技术实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项所述方法的步骤。
48、本技术实施例与现有技术相比存在的有益效果是:本技术实施例中的扫地机的前侧设置有悬崖传感器,在扫地机执行扫地任务时,如果检测到悬崖,则通过所述悬崖传感器触发所述电机控制模块进行刹车控制,获取检测到悬崖时的第一运动方向,使得扫地机可以及时有效的进行刹车;并根据第一运动方向的反方向确定第二运动方向,根据第二运动方向,通过运动控制模块控制扫地机脱离悬崖所在区域,从而使得扫地机在刹停后能够自动脱离悬崖,更有利于高效的执行清扫任务。
- 还没有人留言评论。精彩留言会获得点赞!