清洁控制方法和装置、清洁机器人以及存储介质与流程
本发明涉及清洁机器人,具体地,涉及一种清洁控制方法和装置、清洁机器人以及存储介质。
背景技术:
1、随着技术的发展,越来越多的场合会使用到清洁机器人。例如,家庭室内、大型场所等场合会使用扫地机器人、拖地机器人等清洁机器人进行清洁。
2、相关技术中,清洁机器人在对地毯之类的地面介质进行清洁时,在清洁路径上采用与地面相同的清洁路径处理方式,即沿同一路径进行单一方向的清洁。这种清洁方式应用到地毯之类的地面介质,会出现除污率较低,清洁效果不佳的问题。
技术实现思路
1、为了至少部分地解决现有技术中存在的问题,提供一种清洁控制方法、一种清洁控制装置、一种清洁机器人和一种计算机可读存储介质。
2、根据本发明的一个方面,提供一种清洁控制方法,应用于清洁机器人,该方法包括:在清洁机器人执行清洁任务的过程中,若清洁机器人清洁的目标区域为目标地面介质所在的介质区域,控制清洁机器人从至少两个不同的方向清洁所述目标地面介质。
3、示例性地,控制清洁机器人从至少两个不同的方向清洁目标地面介质,包括执行如下转动步骤:
4、控制清洁机器人的滚刷沿第一方向转动第一预设圈数;
5、控制清洁机器人的滚刷沿第二方向转动第二预设圈数;
6、其中,第一方向和第二方向为相反方向。
7、示例性地,控制清洁机器人从至少两个不同的方向清洁目标地面介质,包括:
8、控制清洁机器人每移动预设距离,执行至少一次转动步骤。
9、示例性地,控制清洁机器人每移动预设距离,执行一次转动步骤,包括:
10、清洁机器人每移动预设距离,则停止移动,以执行至少一次转动步骤;
11、其中,预设距离等于清洁机器人的滚刷宽度或者等于清洁机器人的吸尘口的宽度,滚刷位于吸尘口内的滚刷腔中。
12、示例性地,控制清洁机器人从至少两个不同的方向清洁目标地面介质,包括:
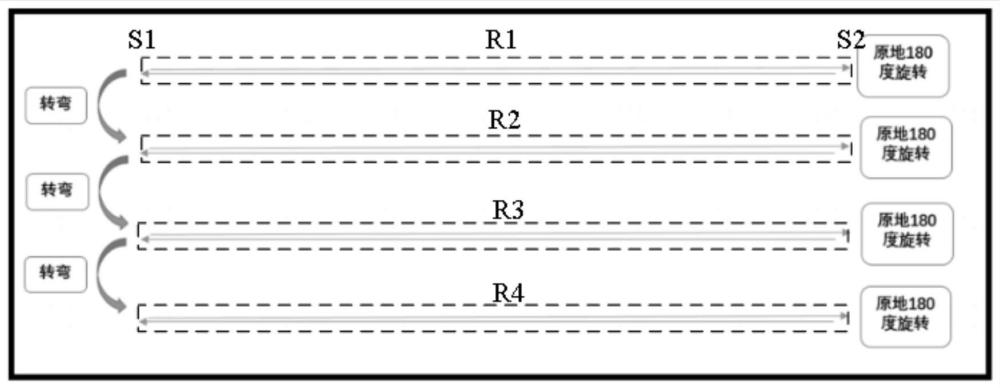
13、控制清洁机器人沿第一清洁路径在目标区域进行清洁;
14、其中,清洁机器人沿第一清洁路径在目标区域进行清洁的过程中,清洁机器人沿第一清洁路径中的至少部分清洁路径往复清洁至少两次。
15、示例性地,在清洁机器人执行清洁任务的过程中,该方法还包括:获取清洁机器人采集的介质检测信息,基于介质检测信息确定目标地面介质所在的介质区域的位置;基于目标区域的位置以及介质区域的位置,确定目标区域是否为介质区域。
16、示例性地,清洁任务为针对待清洁区域进行清洁的任务,待清洁区域包括地面区域和介质区域,基于介质检测信息确定目标地面介质所在的介质区域的位置,包括:在基于介质检测信息确定清洁机器人检测到目标地面介质的边缘时,基于待清洁区域的目标地图以及当前检测到的目标地面介质的边缘的位置,确定介质区域的位置。
17、示例性地,清洁机器人包括介质传感器,介质传感器用于检测清洁机器人下方的被测区域属于地面还是目标地面介质,介质检测信息包括介质传感器输出的检测信息;和/或,清洁机器人包括清洁件和用于驱动清洁件转动的电机,介质检测信息包括电机的驱动电流和/或驱动电压。
18、示例性地,控制清洁机器人沿第一清洁路径在目标区域进行清洁,包括:控制清洁机器人沿第一清洁路径按第一清洁模式在目标区域进行清洁。
19、示例性地,清洁机器人包括风机,风机用于对目标区域的脏污进行抽吸;第一清洁模式包括:控制风机以第一预设风力工作;其中,第一预设风力大于清洁机器人在除介质区域以外的地面区域进行清洁时所采用的第二预设风力。
20、示例性地,控制清洁机器人沿第一清洁路径在目标区域进行清洁,包括:执行至少一次清洁控制操作,每次清洁控制操作包括至少一次第一控制操作和至少一次第二控制操作,其中,第一控制操作包括:当清洁机器人运动到第一清洁路径中的目标段清洁路径的第一路径端点时,控制清洁机器人沿目标段清洁路径从第一路径端点运动到目标段清洁路径的第二路径端点;第二控制操作包括:当清洁机器人运动到第二路径端点时,控制清洁机器人沿目标段清洁路径从第二路径端点运动至第一路径端点;其中,至少一次清洁控制操作中的任意两次不同清洁控制操作所对应的目标段清洁路径不同。
21、示例性地,第一路径端点为与目标地面介质的第一边缘之间的距离小于或等于第一预设距离的位置,第二路径端点为与目标地面介质的第二边缘之间的距离小于或等于第二预设距离的位置,第二边缘为与第一边缘相对的边缘。
22、示例性地,至少一次清洁控制操作中的任意两次不同清洁控制操作所对应的第一边缘为同一边缘,至少一次清洁控制操作中的任意两次不同清洁控制操作所对应的目标段清洁路径彼此平行。
23、示例性地,至少一次清洁控制操作包括至少一次第一类清洁控制操作和至少一次第二类清洁控制操作,其中,至少一次第一类清洁控制操作中的任意两次不同清洁控制操作所对应的目标清洁路径彼此平行,至少一次第二类清洁控制操作中的任意两次不同清洁控制操作所对应的目标清洁路径彼此平行;其中,至少一次第一类清洁控制操作中的任一第一类清洁控制操作所对应的目标清洁路径与至少一次第二类清洁控制操作中的任一第二类清洁控制操作所对应的目标清洁路径彼此垂直。
24、示例性地,清洁任务为针对待清洁区域进行清洁的任务,待清洁区域包括地面区域和介质区域;在清洁机器人执行清洁任务的过程中,该方法还包括:若目标区域为地面区域时,控制清洁机器人沿第二清洁路径在目标区域进行清洁;其中,第一清洁路径与第二清洁路径不同。
25、示例性地,控制清洁机器人沿第二清洁路径在目标区域进行清洁,包括:控制清洁机器人沿第二清洁路径按第二清洁模式在目标区域进行清洁。
26、示例性地,清洁机器人包括风机,风机用于对待清洁区域的脏污进行抽吸,第二清洁模式包括:控制风机以第二预设风力工作;其中,第二预设风力小于清洁机器人在介质区域进行清洁时所采用的第一预设风力。
27、示例性地,该方法还包括:在清洁机器人运动到目标地面介质的边缘上时,控制清洁机器人沿第二清洁路径继续清洁第三预设距离,并在清洁第三预设距离后开始执行控制清洁机器人沿第一清洁路径在目标区域进行清洁的操作。
28、示例性地,若目标区域为地面区域时,控制清洁机器人沿第二清洁路径在目标区域进行清洁,包括:在清洁机器人检测到目标地面介质的边缘时,控制清洁机器人在距离目标地面介质的边缘为第四预设距离时停止清洁;控制清洁机器人按照特定方向沿第二清洁路径进行清洁,特定方向为与清洁机器人停止运动时朝向的方向相反的方向;在地面区域的清洁完成时,控制清洁机器人向目标地面介质的边缘运动。
29、示例性地,清洁任务为针对待清洁区域进行清洁的任务,待清洁区域包括地面区域和介质区域;在若清洁机器人清洁的目标区域为目标地面介质所在的介质区域,控制清洁机器人沿第一清洁路径在目标区域进行清洁之前,该方法还包括:控制清洁机器人沿第二清洁路径在待清洁区域进行初次清洁;在待清洁区域的初次清洁完成后,控制清洁机器人向目标地面介质的边缘运动,以开始执行若清洁机器人清洁的目标区域为目标地面介质所在的介质区域,控制清洁机器人沿第一清洁路径在目标区域进行清洁的步骤。
30、根据本发明实施例的另一方面,还提供一种清洁控制装置,应用于清洁机器人,该装置包括:控制模块,用于在清洁机器人执行清洁任务的过程中,若清洁机器人清洁的目标区域为目标地面介质所在的介质区域,控制清洁机器人从至少两个不同的方向清洁目标地面介质。
31、根据本发明实施例的又一方面,还提供一种清洁机器人,所述清洁机器人包括处理器和存储器,所述存储器中存储有计算机程序指令,所述计算机程序指令被所述处理器运行时用于执行上述的清洁控制方法。
32、根据本发明实施例的再一方面,还提供一种计算机可读存储介质,在所述存储介质上存储了程序指令,所述程序指令在运行时用于执行上述的清洁控制方法。
33、根据本发明实施例的清洁控制方法、清洁控制装置、清洁机器人以及计算机可读存储介质,在清洁机器人清洁的目标区域为目标地面介质所在的介质区域时,控制清洁机器人通过从至少两个不同的方向清洁目标地面介质的方式对介质区域进行清洁。这样可以解决单一方向清洁所带来的地面介质上的介质纤维(例如地毯上的毛束)被压倒使得下方的区域被纤维覆盖进而导致清洁不干净的问题。这种从至少两个不同的方向清洁目标地面介质的方案可以有效提高对目标地面介质的除污率,提升目标地面介质的清洁效果。
34、在
技术实现要素:
中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
35、以下结合附图,详细说明本发明的优点和特征。
- 还没有人留言评论。精彩留言会获得点赞!