一种基于气动软体结构的玻璃清洁机器人
本发明属于气动机器人,具体涉及为一种基于气动软体结构的玻璃清洁机器人。
背景技术:
1、随着现代城市建设的飞速发展,摩天大楼、超高层建筑层出不穷,建筑物的高度不断攀升。然而,这也带来了一个严峻的问题:传统的玻璃清洁方法已经无法满足现代建筑的清洁需求。为了解决这一难题,人们迫切需要一种高效、安全的玻璃清洁机器人来替代传统的清洁方式。气动软体结构技术的出现,为设计这样的机器人提供了新的可能。
2、气动软体结构技术,顾名思义,是一种利用柔软材料和空气压力来实现机器人运动与控制的技术。与传统的刚性机器人相比,气动玻璃清洁机器人具有更高的灵活性和适应性。它们由多个气动软体模块组成,这些模块可以通过压缩和放松来实现形状的变化和运动。这种设计使得机器人能够紧密贴合玻璃表面,无论是平面的还是曲面的玻璃,都能轻松应对。
3、在玻璃清洁领域,气动软体结构技术具有显著的优势。首先,由于机器人采用了柔软材料,它们可以更加灵活地适应各种玻璃表面的形状和曲率。这使得机器人在清洁过程中能够紧密贴合玻璃,不留死角,实现全面清洁。其次,气动玻璃清洁机器人的抗风性能较好。在高楼大厦中,风力往往较大,传统的清洁方式容易受到风的影响。而气动玻璃清洁机器人由于采用了柔软材料,能够在较大的风力下保持稳定的清洁作业。
4、此外,气动软体结构技术还具有广阔的应用前景。除了玻璃清洁领域,它还可以应用于其他需要灵活性和适应性的场景。例如,在航天领域,气动玻璃清洁机器人可以执行太空探测任务,因为它们能够轻松适应各种复杂的太空环境。在医疗领域,气动玻璃清洁机器人也可以发挥重要作用,如用于辅助手术操作等。
5、当然,气动软体结构技术在实际应用中还需要解决一些技术难题。例如,如何提高机器人的运动精度和稳定性,如何降低制造成本等。但随着科技的不断进步和研究的深入,相信这些问题都将得到有效解决。
6、总之,气动软体结构技术为设计高效、安全的玻璃清洁机器人提供了一种新思路。通过利用柔软材料和空气压力来实现机器人的运动与控制,我们可以设计出一种能够紧贴玻璃表面、移动自如的玻璃清洁机器人。随着技术的不断发展和完善,相信这种机器人将在未来得到广泛应用,为现代城市的清洁工作带来革命性的改变。
技术实现思路
1、基于气动软体结构技术,本发明提供了一种基于气动软体结构的玻璃清洁机器人,为高效、安全的玻璃清洁机器人提供了一种新思路,用来解决传统的机器人在清洁作业过程中因抗风性差存在安全隐患以及清洁不干净的诸多问题。
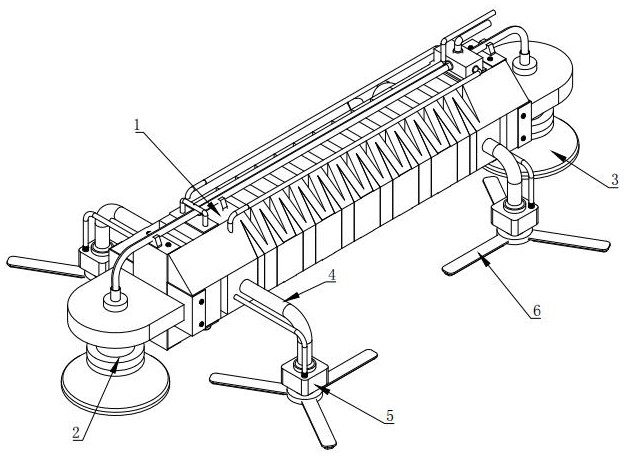
2、为达到上述目的,本发明采用了以下技术方案:一种基于气动软体结构的玻璃清洁机器人,包括有机身主体、以及脱离所述机身主体的驱动控制系统、气源动力系统、负压气源系统、喷水动力系统、恒压电源,所述恒压电源用于给各个系统供电,其中所述机身主体包括有六边形网状结构以及分别固定在其两端的首部安装块、尾部安装块,在所述六边形网状结构的两侧分别设置有柔性汽包,在所述六边形网状结构的中心设置有条形槽,在所述条形槽内设置有弯曲传感器,在所述首部安装块和尾部安装块的两侧分别通过连接杆设置有气动马达,在每个气动马达的输出轴上设置有清洁工具,在所述首部安装块和尾部安装块上分别设置有头部吸盘、尾部吸盘,且两者分别由气源动力系统提供负压动力,在首部安装块上设置有雾化喷头;所述驱动控制系统包括有上位机与数据采集卡,且两者之间通讯连接,实现信息交互,弯曲传感器通过数据线与数据采集卡的信号输入端相连接,并将检测到六边形网状结构的弯曲信号通过数据采集卡传输至上位机中,上位机通过pid控制算法来优化其六边形网状结构弯曲角度,并将发出动作指令通过数据采集卡转化输出动作信号使气源动力系统控制两个柔性汽包的输入气压大小、充放气的时间长短以及间隔,使每个柔性汽包进行规律性扩张或收缩,与此同时上位机发出动作指令通过数据采集卡转化输出动作信号通过负压气源系统分别控制所述头部吸盘、尾部吸盘的输入气压大小、充放气的时间长短以及间隔,以实现爬虫机器人的前进、后退以及身体伸缩的动作;所述上位机发出动作指令通过数据采集卡转化输出清洁信号控制所述气源动力系统为四个气动马达提供气源动力,进而驱动所述清洁工具旋转实现清洁动作;所述上位机发出动作指令通过数据采集卡转化输出喷洒信号控制所述喷水动力系统为雾化喷头提供水源动力并湿润玻璃上的污物,便于清洁工具快速清理。
3、作为上述技术方案的进一步补充说明,所述头部吸盘与尾部吸盘分别通过刚性连接件安装在首部安装块、尾部安装块上。
4、作为上述技术方案的进一步补充说明,所述刚性连接件为十字形卡扣件,两个所述刚性连接件分别卡扣在首部安装块、尾部安装块上并采用螺栓固定连接,在两个所述刚性连接件上设置有固定块,其上设置有安装孔,所述头部吸盘和尾部吸盘分别插装在安装孔并与两个固定块相连接。
5、作为上述技术方案的进一步补充说明,在所述首部安装块、尾部安装块上分别设置有安装槽,所述雾化喷头通过安装槽设置在首部安装块上。
6、作为上述技术方案的进一步解释及限定,所述雾化喷头包括有两个,两个所述雾化喷头通过刚性分支水管与伸缩总水管相连接,两个安装压板配合将两个雾化喷头固定在安装槽上。
7、作为上述技术方案的进一步解释及限定,所述喷水动力系统包括喷射泵与电动控制阀,且两者分别通过信号线与数据采集卡的信号输出端相连接,所述喷射泵的出水口与电动控制阀的进口相连接,所述电动控制阀的出口与伸缩总水管相连接,为两个雾化喷头提供喷洒水源动力。
8、作为上述技术方案的进一步解释及限定,所述气源动力系统包括有空气压缩泵、减压阀、两个比例阀以及单向电磁阀,所述空气压缩泵的出口与减压阀的进口相连接,所述减压阀的出口分两气路,其中一气路分两路与两个比例阀的进口相连接,另一路与单向电磁阀的进口相连接,两个所述比例阀的出口分别通过第一伸缩软管与两个柔性汽包相连接,所述单向电磁阀的进口通过总气管分出四个伸缩支管为四个气动马达提供气源动力,所述空气压缩泵、两个比例阀以及单向电磁阀分别通过信号线与数据采集卡的信号输出端相连接。
9、作为上述技术方案的进一步解释及限定,所述负压气源系统包括真空发生器与两个二位三通电磁阀,且三者分别通过信号线与数据采集卡的信号输出端相连接,所述真空发生器的出口分两气路与两个二位三通电磁阀的出气孔相连接,两个所述二位三通电磁阀的进气孔分别通过第二伸缩软管相连接,为所述头部吸盘、尾部吸盘分别提供负压气源。
10、作为上述技术方案的进一步补充说明,在所述首部安装块和尾部安装块的两侧分别设置有第一管路通孔,位于所述尾部安装块的两个第一管路通孔与安装槽相连通,在所述六边形网状结构上贯穿设置有两个第二管路通孔,两个第二管路通孔分布在条形槽的两侧,位于所述尾部安装块的两个所述伸缩支管通过第一管路通孔穿设汇聚在安装槽内并与总气管相连接,位于所述首部安装块的两个所述伸缩支管依次通过第一管路通孔、第二管路通孔穿设汇聚在安装槽内并与所述总气管相连接,在所述尾部安装块的两侧设置有第三管路通孔,两个所述第一伸缩软管分别依次通过所述第三管路通孔、安装槽与两个所述比例阀的出口相连接,在所述刚性连接件设置有管卡,位于所述首部安装块的管卡用于固定伸缩总水管,位于所述首部安装块的管卡用于固定在第二伸缩软管。
11、作为上述技术方案的进一步解释及限定,所述机身主体采用3d打印的tpu材料制成。
12、与现有技术相比,本发明具有以下优点:
13、1.本发明本发明所设计的玻璃清洁机器人,其机身主体采用六边形网状结构以及分别固定在其两端的首部安装块、尾部安装块三部分设计,在六边形网状结构的两侧分别设置有柔性汽包,同时机器人头部和尾部的吸盘设计,玻璃清洁机器人在弯曲传感器的检测下利用柔性汽包和头部机尾部的吸盘的配合,实现了身体的弯曲和移动,这种设计使得机器人能够在各种复杂环境中灵活运动,这不仅为机器人提供了更高的自由度,使其能够轻松适应各种复杂表面和环境,还赋予了它出色的可塑性和韧性。这种设计使得机器人在执行清洁任务时,能够灵活应对各种挑战,如凹凸不平的地面、狭窄的缝隙等,从而大大提高了清洁的效率和效果。
14、2.本发明采用气动驱动方式,相较于传统的电动机器人,具有显著的安全性和低噪音优势。气动驱动不仅减少了振动,提高了机器人的稳定性,还降低了对环境的影响,使其更加适用于需要高安静度的工作场所。此外,气动驱动方式还具有较长的使用寿命和较低的维护成本,进一步提升了本发明的实用性和经济性。
15、3.本发明通过吸盘与真空发生器的结合,机器人能够在不同表面上实现良好的粘附能力,确保在清洁过程中稳定不移位。这种设计不仅提高了机器人的稳定性,还避免了传统清洁工具可能产生的电磁干扰和有害废物,更加环保和安全。同时,吸盘的设计还使得机器人能够轻松应对各种表面材质,无论是光滑的玻璃还是粗糙的地面,都能轻松应对,展现出强大的通用性和适应性。
- 还没有人留言评论。精彩留言会获得点赞!