一种室外窗户多轴移动清洁机器人
本发明属于室外窗户清洁,具体涉及一种室外窗户多轴移动清洁机器人。
背景技术:
1、室外窗户清洁机器人的主要功能是通过自动化的方式高效、安全地清洁窗户玻璃,它们能够自动探测窗户的边角距离,规划擦窗路径,并凭借自身的真空泵或风机装置牢牢吸附在玻璃上,通过机身上的抹布或其他清洁工具清除玻璃上的脏污。
2、在公开号为cn211484324u的中国专利中,提到了一种基于stm32单片机的家用智能窗户清洁机器人,包括机器人,所述机器人的顶部上侧设有电源线接口,所述机器人的顶部中间位置处设有排气口,所述机器人的底部四个边角处均设有车轮,所述机器人的底部中间位置处设有风机安装槽,所述机器人顶部设有握把,所述机器人的侧面设有红外感应模块安装孔,所述机器人的底部上下两侧对称设有清洁抹布安装区域,所述机器人的底部中间设有风机进气孔,所述机器人的内部设有风机,所述风机的右上侧设有红外感应模块,所述风机的右下侧设有直流减速电机,所述风机的底部设有印刷电路板,所述机器人的底壳中间位置设有风机固定板。该实用新型可自动化清洁窗户,取代人工操作,智能化程度高,实用性强;
3、该窗户清洁机器人在使用过程中设置为家用型,对于部分距离较远或小块分区的窗户,会因受到电源线长度、窗户结构等原因无法进行清洁,且清洁面积小。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种室外窗户多轴移动清洁机器人,以解决只能对自家窗户位置进行清洁,导致清洁面积小带来的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种室外窗户多轴移动清洁机器人,包括:
4、支撑板;
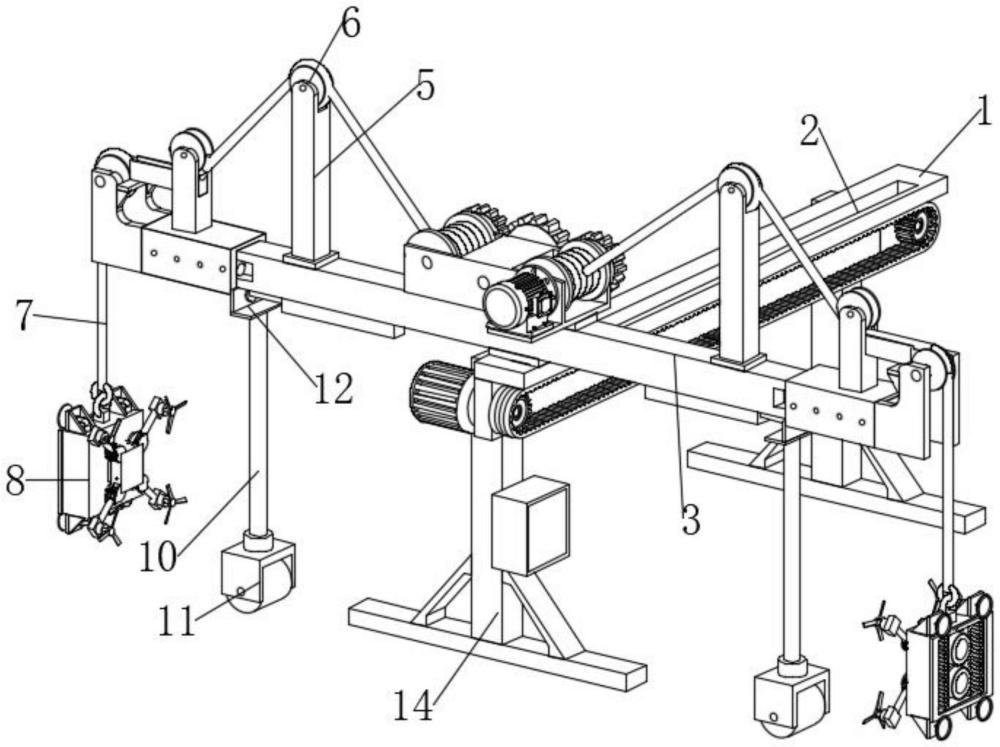
5、所述支撑板的顶端一侧开设有滑动槽,所述滑动槽内活动穿插连接有位移架,所述位移架的顶端两侧均套设有缆绳,且两个缆绳远离位移架的一端均安装有清洁机器人,所述支撑板的底端一侧安装有定位架;
6、所述位移架的底端两侧均安装有气缸,且两个气缸的输出端均安装有第一安装座,所述第一安装座的另一端与位移架安装在一起;
7、所述位移架包括位移杆、驱动结构、垫板和调节结构,所述垫板安装在位移杆的顶端中部,所述驱动结构固定连接在垫板的顶端,所述位移杆的两端均开设有两个限位槽,所述调节结构设置有两个,且两个调节结构分别安装在相邻的两个限位槽内,所述位移杆安装在滑块的顶端;
8、所述清洁机器人包括机器人本体、螺旋桨和吊环座,所述机器人本体的顶端与底端均安装有两个第三安装座,且四个第三安装座和机器人本体之间均共同安装有吸盘,所述螺旋桨安装在机器人本体的一端中部,所述吊环座安装在机器人本体的顶端中部,所述吊环座与缆绳安装在一起。
9、优选的,所述位移架的顶端两侧均设置有第一支撑杆,且两个第一支撑杆内均安装有支撑轮,两个所述支撑轮分别与两个缆绳活动穿插连接,所述定位架的一端安装有控制箱,且两个所述第一安装座的底端均固定连接有第二支撑杆,所述第二支撑杆的底端均固定连接有万向轮。
10、优选的,所述驱动结构包括第二安装座、第一转动轮、第一齿轮、第一电机和带动齿轮,所述第一转动轮和第一齿轮均设置有两个,且两个第一转动轮分别安装在第二安装座内的两侧,所述第一齿轮分别固定连接在两个第一转动轮的一端,所述带动齿轮活动穿插连接在第二安装座的一端,所述第一电机安装在第二安装座的另一端,所述第二安装座固定连接在垫板的顶端。
11、优选的,所述第一电机的输出端与其中一个第一齿轮的一端固定连接在一起,两个所述第一转动轮分别与两个缆绳套设在一起,两个所述第一齿轮分别啮合连接在带动齿轮的两端。
12、优选的,所述调节结构包括滑座、固定座、限位轮、支撑座、固定板、第二转动轮和连接座,所述滑座的内壁两侧均等距离安装有多个滑轮,所述固定座固定连接在滑座的顶端,所述限位轮活动穿插连接在固定座的内壁两侧,所述支撑座固定连接在固定座的内壁底端,所述固定板设置有两个,且两个固定板均固定连接在滑座的一端,所述第二转动轮活动穿插连接在两个固定板之间,所述连接座固定连接在两个固定板的一端,所述滑座活动穿插连接在位移杆的外表面。
13、优选的,所述限位轮、支撑座和第二转动轮均与缆绳活动穿插连接在一起,所述支撑座的底端一侧固定连接在连接座的顶端。
14、优选的,所述滑座安装在第一安装座的一端,所述滑轮均活动穿插连接在限位槽内。
15、优选的,所述万向轮的底端均与定位架的底端处于同一水平面。
16、优选的,所述定位架包括连接板、第二齿轮、链条、第二电机和支架,所述第二齿轮和支架均设置有两个,且两个第二齿轮分别活动穿插连接在连接板的一端两侧,所述链条套设在两个第二齿轮的外表面,所述第二电机安装在连接板的另一端,两个所述支架分别安装在连接板的一端两侧,所述连接板固定连接在支撑板的底端。
17、优选的,所述第二电机的输出端贯穿连接板的一端与其中一个第二齿轮固定连接,所述第二齿轮均与链条啮合连接,所述链条的顶端固定连接在滑块的底端。
18、与现有技术相比,本发明的有益效果是:
19、(1)通过设置定位架、第一电机、第一齿轮和清洁机器人实现x轴和y轴方向的移动,不再局限于单层私人窗户清洁,可对大面积外墙窗户进行清洁,有效提升了清洁范围和效率,相比传统家用型室外窗户清洁机器人或仅能竖直升降的吊篮装置,极大地提高了可清洁区域的覆盖率。
20、(2)利用第二齿轮、链条和第二电机实现x轴移动,减少了因清洁范围受限而需安装多个清洁机器人的需求,从而降低了设备购置成本和资源浪费,同时,避免了因采用过重配重解决缆绳摇摆问题而带来的吊篮固定装置及电机成本的大幅增加。
21、(3)通过设置气缸及调节装置实现z轴方向移动,使装置能够对有突出结构的楼体进行清洁作业,克服了现有部分清洁机器人只能紧贴窗户移动而无法应对特殊建筑结构的局限,提高了装置的通用性和实用性,能够适应多种建筑结构。
22、(4)在下降过程中可通过z轴方向移动增大与玻璃之间的距离,有效降低了击碎玻璃或在玻璃上留下划痕的概率,减少了对建筑物玻璃的潜在损害,保障了建筑物外观完整性和安全性。
23、(5)在清洁机器人内加装的陀螺仪,并在清洁机器人的一端设置螺旋桨,从而可对清洁机器人在悬空状态下进行姿态感知与控制、运动检测与跟踪,当遇到大风、吸盘吸附不牢、安全绳断开等突发情况时,能根据预设阈值判断并启动螺旋桨产生反推力,降低摆动幅度或下降速度,大大提高了清洁机器人在高空作业时的安全性,相比传统依靠增加配重解决缆绳摇摆问题的方式,减少了因配重摇晃对玻璃造成损伤以及高空坠物的风险,同时降低了因人工高空作业带来的高风险隐患。
24、(6)既可以通过清洁机器人自带的激光雷达对周围环境自动识别并进行3d建模实现自动清洁,减少人工干预,提高清洁的智能化程度,也可通过遥控或主体上自带的机械按钮实现人工操作,满足不同用户需求和使用场景,提供了多样化的操作方式,方便用户灵活控制清洁机器人的作业过程。
- 还没有人留言评论。精彩留言会获得点赞!