清洁模组及扫地机器人的制作方法
本技术涉及清洁,尤其涉及一种清洁模组及扫地机器人。
背景技术:
1、随着科学技术的发展以及生活水平的提高,家用清洁设备已经越来越普及,减轻了人类家务劳动的负担。例如,扫地机器人、洗地机器人、扫拖一体机器人。
2、相关技术中,以扫地机机器人为例,扫地机器人包括机身和设在机身后部的清洁组件,清洁组件在清洁过程中,有些场景下,需要抬升清洁组件,使清洁组件从拖地位置切换到抬升位置,例如:在清洁地毯时,使清洁组件处于抬升位置,以防打湿地毯;又如:清洁设备在越障或回基站时,清洁组件处于抬升位置,防止清洁组件在拖地位置进行越障或回基站时,清洁组件处于拖地位置,被障碍物剐蹭或碰撞从机身上脱落下来。
3、因此,机身内设升降结构,升降结构用于驱动清洁组件做升降运动,但现有的升降结构复杂,在机身内所占用的空间大。
技术实现思路
1、鉴于上述问题,本技术实施例提供一种清洁模组,能够带动清洁组件升降,且结构简单,成本低。
2、为了实现上述目的,本技术实施例提供如下技术方案:
3、本技术实施例提供一种清洁模组,所述清洁模组包括:
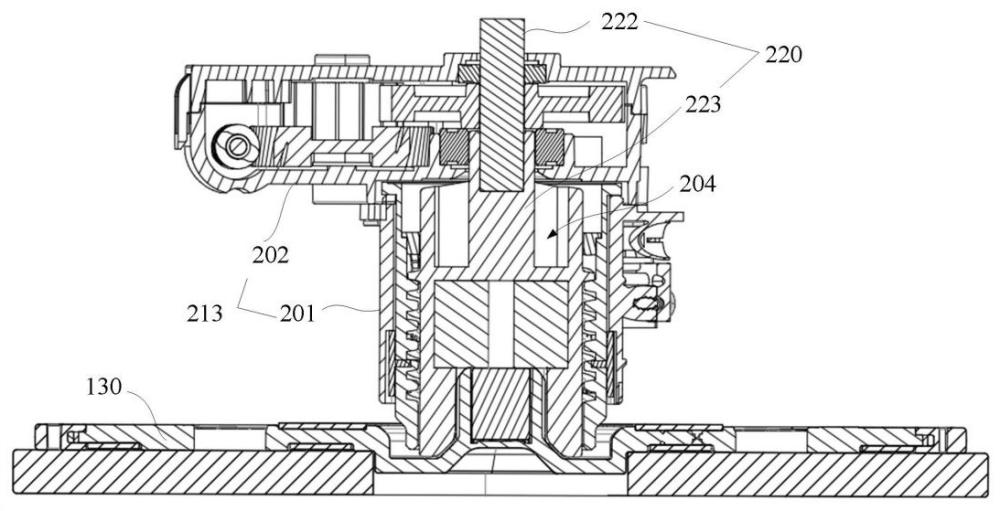
4、驱动机构,包括壳体以及驱动组件;
5、升降机构,包括第一套筒以及第二套筒,所述第一套筒的一端与所述驱动组件防转动且沿其轴线方向可滑动地连接,所述第一套筒的另一端连接清洁组件;所述第二套筒套设在所述第一套筒外,所述第二套筒与所述第一套筒之间形成螺旋机构;
6、阻尼件,设在所述壳体上,所述阻尼件与所述第二套筒过盈抵接,对所述第二套筒产生阻尼;
7、所述驱动组件驱动所述第一套筒转动时,在所述阻尼件、螺旋机构的配合下,所述第一套筒相对于所述第二套筒以及所述驱动组件做上升或下降运动,以带动所述清洁组件做升降运动,使所述清洁组件处于抬升位置或拖地位置。
8、本技术实施例提供的清洁模组,利用第一套筒与驱动组件的传动齿轮防转动且沿其轴线方向可滑动地连接,第一套筒和第二套筒之间形成螺旋机构,且阻尼件为第二套筒提供阻尼力,使得驱动组件驱动第一套筒转动时,第一套筒和第二套筒之间形成转速差。由于该转速差的存在,第一套筒可以相对第二套筒及驱动组件升降,以此实现清洁组件的升降。清洁模组的这种升降方式采用的结构部件较少,无需占用机身内部较大的空间,结构简单,成本低。
9、可选地,所述第一套筒包括第一筒体,及设在所述第一筒体的顶部上的连接轴;
10、所述第一筒体的底部与所述清洁组件连接,所述连接轴与所述传动齿轮的内孔防转动且可滑动连接;
11、所述第二套筒套在所述第一筒体外,所述第二套筒的内壁与所述第一筒体外壁之间形成所述螺旋机构;
12、所述连接轴在所述驱动组件驱动下转动,同时所述连接轴沿轴向相对于所述传动齿轮的内孔可滑动,以驱动所述第一筒体和所述清洁组件滑动。
13、可选地,所述连接轴垂直于其轴线方向的横截面形状为非圆形;所述传动齿轮的内孔垂直于其轴线方向的横截面形状,与所述非圆形相匹配;以使所述连接轴与所述传动齿轮同步转动,且沿其轴线方向可滑动。
14、可选地,所述连接轴的外壁上沿其轴线方向具有至少一个第一平直面,以使所述连接轴的所述横截面形状为所述非圆形;所述传动齿轮的内孔壁上沿其轴线方向具有至少一个与所述第一平直面配合的第二平直面。
15、可选地,所述连接轴的外壁和所述传动齿轮的内孔壁中的一个上设沿其轴线方向延伸的至少一个第一凹槽,另一个上设沿其轴线方向延伸的至少一个第一凸起,所述第一凸起嵌入所述第一凹槽内,以使所述连接轴随所述传动齿轮同步转动且可滑动。
16、可选地,所述第一凹槽设在所述连接轴的外壁上,所述第一凸起设在所述传动齿轮的内壁上;所述连接轴带动所述清洁组件滑动时,所述第一凹槽在所述第一凸起上滑动。
17、可选地,所述传动齿轮位于所述壳体内,沿竖向方向所述传动齿轮的顶部与所述壳体的顶部之间预留供所述第一套筒升降的避让空间。
18、可选地,所述壳体的顶部设避让孔;所述壳体的顶部外具有罩住所述避让孔,且向外凸出的保护盖,所述保护盖与传动齿轮之间围成所述避让空间;
19、所述清洁组件在抬升位置,所述连接轴的顶部穿过所述避让孔伸入所述保护盖的内腔。
20、可选地,所述阻尼件设在所述壳体的内壁与所述第二套筒的外壁之间。
21、可选地,所述壳体包括第一壳体以及环形壳体;所述环形壳体设在所述第一壳体的底部上,二者保持相对固定;
22、所述第一壳体具有安装腔,所述传动齿轮设在所述安装腔内;所述第一套筒的顶部位于所述安装腔内与所述传动齿轮连接;
23、所述环形壳体套在所述第二套筒外,所述阻尼件设在所述环形壳体的内壁与所述第二套筒的外壁之间。
24、可选地,所述第二套筒的上端的外壁设有第一外沿;所述环形壳体上设有第一台阶,所述第一外沿可转动地搭接在所述第一台阶上,以将第二套筒可转动地设在所述壳体上。
25、可选地,所述第一台阶位于所述环形壳体的顶部或者位于所述环形壳体的内壁上。
26、可选地,所述第一套筒还包括设在所述第一筒体的底部且向上弯曲的第二筒体;所述第二筒体位于所述第一筒体外,且与所述第一筒体之间围成环形的第二凹槽;所述第二套筒嵌入所述第二凹槽内;所述阻尼件位于所述第二筒体的上方。
27、可选地,所述环形壳体和所述第二套筒之间形成环形导向腔;所述清洁组件处于抬升位置、拖地位置时,所述第二筒体的上边缘始终位于所述环形导向腔内;且在所述第一筒体的带动下,所述第二筒体的上边缘在所述环形导向腔内做升降和转动运动;所述阻尼件位于所述第二筒体的上边缘的上方。
28、可选地,所述螺旋机构包括螺纹槽和筋条;
29、所述螺纹槽和所述筋条中的一个设在所述第二套筒的内壁,另一个设在所述第一筒体的外壁上。
30、可选地,清洁模组还包括限位结构,用于在拖地位置克服所述阻尼件对所述第二套筒产生的阻尼作用,阻止所述第一套筒与所述第二套筒之间的相对转动,以使所述第一套筒和所述第二套筒能够相对于所述壳体同步转动,以使所述清洁组件转动拖地。
31、可选地,所述螺纹槽设在所述第二套筒上,所述筋条设在所述第一筒体上;所述限位结构包括端盖,所述端盖设在所述第二套筒的上端,所述端盖具有向下凸出的至少一个限位凸起,所述限位凸起位于所述螺纹槽的上端部;
32、在所述清洁组件处于抬升位置时,沿所述筋条的旋转方向,所述筋条的一侧端抵接在所述限位凸起的侧壁上,以阻挡所述第一筒体相对于所述第二套筒继续向上抬升;
33、所述限位结构还包括设在所述螺纹槽的下端部的限位面;在所述清洁组件处于拖地位置时,沿所述筋条的旋转方向,所述筋条的另一侧端抵接在所述限位面上,以阻挡所述第一筒体相对于所述第二套筒继续向下下降。
34、可选地,所述驱动组件驱动所述第一筒体沿第一方向转动时,所述第一筒体相对于所述第二套筒向下运动,当所述筋条抵接在所述限位凸起上时,所述清洁组件处于拖地位置,所述驱动组件继续驱动所述第一筒体沿第一方向转动,所述第一套筒和所述第二套筒同步转动,以驱动所述清洁组件自转拖地。
35、可选地,所述阻尼件包括固定圈,及设在所述固定圈的内壁的一圈上的若干毛条,所述毛条上远离所述固定圈的一端过盈抵接在所述第二套筒的外壁上;所述固定圈设在所述环形壳体上;或者
36、所述阻尼件为毛条,若干所述毛条的一端固定在所述环形壳体的内壁上,另一端过盈抵接在所述第二套筒的外壁上。
37、可选地,所述第一筒体的底部设有向上凹进的第三凹槽;
38、所述清洁组件包括清洁盘,及设在所述清洁盘底部的清洁件;所述清洁盘的顶部具有固定凸起,所述固定凸起伸入所述第三凹槽内,与所述第一筒体磁吸连接,以将所述清洁组件安装在所述第一筒体上。
39、可选地,第三凹槽和所述固定凸起中的一个上设铁块,另一个上设磁体,通过所述磁体与所述铁块的磁吸作用,以将所述固定凸起安装于所述第三凹槽上。
40、本技术实施例第二方面提供一种扫地机器人,包括:
41、机身;
42、边刷,设在所述机身的前部的右侧上;
43、滚刷,设在所述机身的底部上;
44、第一方面任一实施例所述的清洁模组, 所述清洁模组设在所述机身上,所述清洁组件位于所述机身的底部下方;
45、沿机身的前进方向,所述边刷位于所述滚刷的前方,所述滚刷位于所述清洁模组的前方;所述边刷和所述滚刷用于干式清洁,所述清洁组件用于湿式清洁。
46、可选地,所述清洁模组为两个,一个所述清洁模组的清洁组件相对于所述机身可摆动,以具有沿边位置和内缩位置,在所述沿边位置,所述清洁组件的至少部分伸出所述机身的最大宽度的边缘外,以沿边清洁;另一个所述清洁模组的清洁组件相当于所述机身不可摆动;
47、在所述清洁组件处于内缩位置时,两个所述清洁模组的清洁组件的相邻端之间无缝隙。
48、本技术实施例提供的扫地机器人具有与上述实施例提供的清洁模组相同的有益效果,在此不再赘述。
49、除了上面所描述的本技术实施例解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本技术实施例提供的清洁模组及扫地机器人所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作出进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!