一种高精度双轴深层水平位移自动测量方法及测量系统与流程
[0001]
本发明涉及自动测量系统相关模块的元器件连接、组装、测量实施方法领域,具体来说是一种深层水平位移自动测量系统及测量方法。
背景技术:
[0002]
现有常用的深层水平位移测量系统按照传感器类型可分为加速度计式测斜仪和应变片式测斜仪。这类仪器的敏感元件具有结构简单、稳定性好、效率高、重复性高的特点。测斜监测前将测读仪与测头用电缆连接起来,功能开关置于工作位置,测头竖起并沿四个导轮平面正反方向倾斜,数显指示有正负变化,上轮对应方向倾斜为正,倾角增大时数字发生变化,当倾斜到
±
53
°
时,数显应指示饱和,出现闪烁,说明仪器工作正常,在进行基坑监测前将测头导轮按一定方向放入固定不变且垂直于水平面的测斜导管中,将探头放入测斜管内每隔0.5m或1.0m,稳定后读取水平位移数值。
[0003]
但上述测量方法存在一定的弊端:
[0004]
(1)通过人工拉放测头来进行监测,易产生人为误差;
[0005]
(2)监测过程繁琐、耗时较长,对于中、大规模基坑,采集时间过长,数据滞后性;
[0006]
(3)为满足监测需要,所消耗人工量极大;
[0007]
(4)不能满足深基坑关键工序施工时要求的实时监控要求;
[0008]
(5)采集费用多为人工费用,且占据总监测费用较高比例。
技术实现要素:
[0009]
本发明的目的在于解决现有技术的不足,提供一种通过无线传输的深层水平位移测量方法,以代替人工操作,并保证保证测量成果的准确性。
[0010]
为了实现上述目的,设计一种高精度双轴深层水平位移测量方法,包括以
[0011]
下步骤:
[0012]
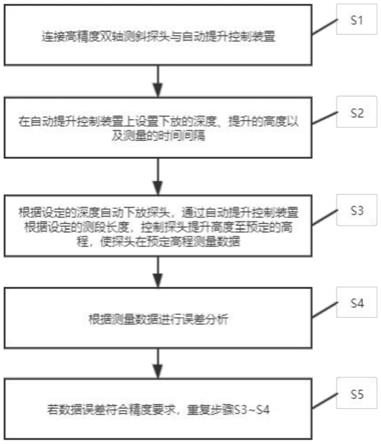
s1、连接高精度双轴测斜探头与自动提升控制装置;
[0013]
s2、在自动提升控制装置上设置下放的深度、提升的高度以及测量的时间间隔;
[0014]
s3、根据设定的深度自动下放探头,通过自动提升控制装置根据设定的测段长度,控制探头提升高度至预定的高程,使探头在预定高程测量数据;
[0015]
s4、根据测量数据进行误差分析;
[0016]
s5、若数据误差符合精度要求,重复步骤s3~s4,进行下一高程的测量。
[0017]
进一步的,还包括以下步骤:
[0018]
s6、若数据误差过大且可以判断非系统本身的原因,人工介入控制探头提升,通过手工方式进行测量。
[0019]
进一步的,在所述步骤s4中,所述误差分析包括以下步骤:
[0020]
s41、分析测量点位数据稳定性;
[0021]
s42、分析传感器角度定位误差;
[0022]
s43、分析系统误差;
[0023]
s44、分析零漂误差。
[0024]
进一步的,在所述步骤s43中,还包括以下步骤:
[0025]
s431、分析系统相对误差;
[0026]
s432、分析系统累计误差。
[0027]
进一步的,在所述步骤s3中,所述探头在预定高程测量数据包括以下步骤:
[0028]
s31、在探头保持不动的状态下,通过探头进行一测回的测量;
[0029]
s32、将探头旋转90
°
,进行二测回的测量。
[0030]
本发明的另一方面,还提供了一种高精度双轴深层水平位移测量系统,该系统包括互相连接的高精度双轴测斜探头和自动提升控制装置,所述自动提升控制装置包括提升控制中心,所述提升控制中心包括提升算法模块、数据及误差分析模块、报警模块和控制模块,所述提升算法模块用于在测量工作前提前设定下放的深度、提升的高度以及测量的时间间隔,使所述高精度双轴测斜探头在控制模块的控制下根据设定自动控制下放和提升,在每个时间间隔内完成测量工作,并将数据传输到数据及误差分析模块,所述数据及误差分析模块对测量误差进行分析,若误差过大且可以判断非系统本身的原因,则报警系统启动,人工介入控制该测段的提升。
[0031]
进一步的,所述高精度双轴斜侧探头,在现有双轴测斜探头的基础上,沿侧壁两个方向新增加了4个计程轮,所述探头内部安装有与自动提升控制装置连接的通讯模块,用于传输探头的测量数据。
[0032]
进一步的,所述自动提升控制装置通过高强纤维与所述高精度双轴斜侧探头连接,并通过滚轮控制所述高精度双轴斜侧探头的下放深度和提升高度。
[0033]
发明的有益效果
[0034]
本发明所提供的一种高精度双轴深层水平位移自动测量方法及测量系统的有益之处在于:本发明通过建立基于无线传输的自动化测量技术以代替人工重复操作,可以在提升外业工作效率的同时,保证测量成果的准确性;本发明采用实时的无线传输技术,在进行外业测量的同时可以同步进行内业的处理工作,大大减小了测量的时间成本。本发明的高精度双轴深层水平位移测量系统在满足日常的测量需要的同时,还可以大大提高测量的效率,使得有限的人力、设备投入创造出更好的经济效益,通过现场试验数据对比人工作业,外业作业效率提高近50%,内业数据处理及分析效率提高60%以上,总体人工成本节约60%,测斜单项的综合经济效率提高40%,因此通过对本发明的改进和推广,对形成产业化规模具有良好的前景。
附图说明
[0035]
图1示例性示出了本发明的;
[0036]
图2示例性示出了本发明的高精度双轴测斜探头的结构示意图;
[0037]
图3示例性示出了本发明的提升控制装置的结构示意图;
[0038]
图4示出了本发明实施例的检测数据组量柱状图;
[0039]
图5示出了本发明实施例的数据丢失率统计图;
[0040]
图6示出了本发明实施例的数据方差统计图;
[0041]
图7和8示出了本发明实施例与人工测量的数据趋势性曲线对比图;
[0042]
图中:1.计程轮 2.充电电路板 3.通讯模块 4.步进电机 5.钢丝滚筒 6.钢丝导向器 7.钢丝 8.探头接头 9.电机驱动器 10.电源。
具体实施方式
[0043]
接下来,通过结合附图和实施例,对本发明的技术方案做进一步说明。
[0044]
参照图1,本发明所提供的一种高精度双轴深层水平位移测量方法包括以下步骤:
[0045]
s1、连接高精度双轴测斜探头与自动提升控制装置;
[0046]
s2、在自动提升控制装置上设置下放的深度、提升的高度以及测量的时间间隔;
[0047]
s3、根据设定的深度自动下放探头,通过自动提升控制装置根据设定的测段长度,控制探头提升高度至预定的高程,使探头在预定高程测量数据;
[0048]
s4、根据测量数据进行误差分析;
[0049]
s5、若数据误差符合精度要求,重复步骤s3~s4,进行下一高程的测量。
[0050]
s6、若数据误差过大且可以判断非系统本身的原因,人工介入控制探头提升,通过手工方式进行测量。
[0051]
相应的,为了进行上述高精度双轴深层水平位移测量方法,本发明提供了一种高精度双轴深层水平位移测量系统,该系统包括了高精度双轴测斜探头和提升控制装置。
[0052]
其中,所述高精度双轴测斜探头参照图2所示,现有高精度双轴测斜探头代替传统单轴测斜探头并进行了一些改进,相比较于现有双轴测斜探头,沿侧壁两侧分别新增加了2个计程轮1,由于传统的单轴测斜探头只有4个计程轮1,在测量时需要两个测回,两个测回旋转的角度为180
°
,在两侧新增加了4个计程轮1之后,改变了传统两测回旋转的角度,此时只需要旋转90
°
即可消除仪器的零漂出差;增加了4个计程轮1之后,在正交的两个方向均有计程轮卡在测斜管的凹槽内,可以有效的减小由于人工下放探头所造成的扭转误差。);探头内部安装了与提升控制装置连接的通讯模块2,用于测量数据的传输;探头内置了充电电路板3,包括成品锂电池(包括各种充电电池或电池板芯)、自保护电路等,并在提升控制装置一端增加了充电端口,仪器闲置不用时可以对探头进行充电,用于通讯模块等供电。
[0053]
所述提升控制装置包括工控机和pc端两个部分,其中pc端作为提升算法模块、数据及误差分析模块和报警模块,工控机作为控制模块,在所述工控机中,参照图3所示,包括步进电机4,所述步进电机4上设有钢丝滚筒5,钢丝滚筒上缠绕有带有电线的钢丝7,所述钢丝7一端通过钢丝导向器6进行导向,所述钢丝另一端接有探头接头8,电机驱动器9与pc端连接,用于驱动步进电机4,电源10用于向所述提升控制装置及探头供电。
[0054]
在本实施例中,工控机采用步进电机驱动,所述步进电机带电机驱动器,及485总线接口,电机控制由客户自备pc机及控制软件执行,电源为24v直流电池供电,步进电机驱动钢丝滚筒旋转,缠绕钢丝,滚筒直径为200mm,长度为180mm。钢丝滚筒可缠绕50米钢丝,钢丝直径为2mm,所述钢丝导向器,可随钢丝滚筒同步移动,对缠绕钢丝进行导向,所述导向器带有防拉紧机构及传感器,钢丝拉紧时将停机(需在pc端中设置),探头接头带有内螺纹孔,与探头通过螺纹进行连接,钢丝与探头接头连接,本工控机安装在箱体中,箱体带一个前开门,箱体带有底板及把手,底板上带安装孔,可以安装膨胀螺栓固定。
[0055]
所述pc端包括了提升算法模块、数据及误差分析模块和报警模块,所述提升算法
模块用于在测量工作前提前设定下放的深度、提升的高度以及测量的时间间隔,使所述高精度双轴测斜探头在控制模块的控制下根据设定自动控制下放和提升,在每个时间间隔内完成测量工作,并将数据传输到数据及误差分析模块,所述数据及误差分析模块对测量误差进行分析,若误差过大且可以判断非系统本身的原因,则报警系统启动,人工介入控制该测段的提升。
[0056]
对于具体的误差分析,所述数据及误差分析模块包括以下功能:
[0057]
(1)测量点位数据稳定性分析
[0058]
数据稳定性是衡量数据波动性与离散性的指标,数据波动越小,离散程度越小,则稳定性越高。
[0059]
测斜探头在某一点位i处将测量n组数据,每组数据包含两个垂直方向的倾角,通过计算将得到该位置n个位移偏移量,计为d1、d2...dn,n个数据的均值为:
[0060][0061]
标准值为:
[0062][0063]
变异系数为:
[0064][0065]
根据对众多现场试验数据回归分析研究,采用阈值0.05作为评价标准,即当变异系数δ<0.05时,说明该组数据稳定,取该组数据的平均值φ
m
作为该位置的位移偏移量。当变异系数不满足条件时,重复测量,如仍然超限,报警告知,则说明该组数据的差异性较大,可能是由于系统原因、操作流程或者周围环境影响导致的,此时人工介入,在该位置处采用人工测量,直至满足精度要求。
[0066]
(2)传感器角度定位误差分析
[0067]
施工现场环境错综复杂,测斜管常常由于管口保护不周,使得泥土颗粒等杂物进入测斜管,探头在提升过程中可能会受到碰撞或瞬间冲击,将会导致角度定位误差;除此之外,由于安装在测杆上的轴承和导轮长时间使用造成的磨损也会造成角度定位误差;若想获得高精度的测量结果,就要建立由于传感器角度定位导致的误差分析模型。
[0068]
假设传感器在某一点位发生定位误差,则所测倾角将产生一个倾角误差,此时测量倾角分别计为α
′
i
、β
′
i
,则位移误差为:
[0069]
δ=lsinθ
i
′-
lsinθ
i
[0070]
其中:tan2θ
′
=tan2α
′
+tan2β
′
[0071]
tan2θ
i
=tan2α
i
+tan2β
i
[0072]
由于实际测量过程中,标准测斜曲线该点位倾角θ并不能真实的反应出来,因此需
要以前一个点位(第i-1个)的测量结果为参考:
[0073]
假设测斜管埋设正常,且不发生弯折,按照正常工况随结构一起倾斜,根据现场对比试验数据的回归分析,拟定ε作为阈值(若阈值设定不合理,可在系统中修改),即若|d
i-d
i-1
|≥ε,则认为该点位测量数据存在异常,需要重新测量,反之,则认为该点测量数据正常,计入正常统计。
[0074]
(3)系统误差分析
[0075]
自动提升系统通过控制滚轮转动的角度进而控制探头提升的高度,但是在滚轮转动或探头提升的过程中,筋材围绕滚轮缠绕,这就导致筋材转动的实际半径是滚轮半径加筋材半径,并不是理论上的滚轮半径,这就导致实际测量曲线相当于理论曲线产生向上的偏移,实际测量结果将产生误差。系统误差分析包括相对误差分析和累计误差分析。
[0076]
其中,相对误差分析:设筋材半径为r,滚轮半径为r,滚轮上筋材缠绕的圈数为n,滚轮转动一周,即探头提升一个测段(假设测段长度为0.5m),探头累计实际提升高度为:
[0077]
h=2π[(r+r)+(r+3r)+
…
+(r+(2n-1)r)]=2π[nr+n2r]
[0078]
前一阶段提升高度为:
[0079]
h=2π[(n-1)r+(n-1)2r]
[0080]
提升高度差值为:
[0081]
δ=h-h=2π[r+(2n-1)r]
[0082]
假设测斜管相对于初始位置偏斜方向的夹角为θ,则θ满足双轴探头两垂直方向倾角的位置关系为:
[0083]
tan2θ=tan2α+tan2β
[0084]
则该次提升相对于上次提升产生的位移误差为:
[0085]
ε=lsinθ-(lcosθ-δ)tanθ=δtanθ=2π[r+(2n-1)r]tanθ
[0086]
由上式可以看出,误差主要取决于滚轴的半径r,由于探头提升高度所缠绕滚轮的圈数n,筋材的半径r以及倾斜的角度θ。如果想减小误差,则需要尽量减小筋材的半径r,因此选择半径较小,强度较大的筋材作为探头提升的线缆。除此之外,误差的大小还取决于探头提升的高度,即滚轮上筋材缠绕的圈数,因此在探头提升的过程中,应尽可能不要使线圈每圈都叠加,线圈缠绕方向从左向右依次平铺进行,待底层线圈铺满,从右向左缠绕第二层线圈,以最大限度减小误差。
[0087]
累计误差分析:
[0088]
假设滚轮上缠绕筋材圈数为n,则探头实际提升高度:
[0089]
h=2π[(r+r)+(r+3r)+
…
+(r+(2n-1)r)]=2π[nr+n2r]
[0090]
理论提升高度:
[0091]
h
′
=2nπr
[0092]
累计提升高度差值为:
[0093]
δ=h-h
′
=2π[nr+n2r]-2nπr=2πn2r
[0094]
则该次提升相对于上次提升产生的位移误差为:
[0095]
ε=lsinθ-(lcosθ-δ)tanθ=δtanθ=2πn2rtanθ
[0096]
由上是可以看出,误差主要取决于由于探头提升高度所缠绕滚轮的圈数n,筋材的半径r以及倾斜的角度θ。如果想减小误差,则需要尽量减小筋材的半径r,因此选择半径较
小,强度较大的筋材作为探头提升的线缆。除此之外,误差的大小还取决于探头提升高度,即滚轮上筋材缠绕的圈数,因此在探头提升的过程中,应尽可能不要使线圈每圈都叠加,线圈缠绕方向从左向右依次平铺进行,待底层线圈铺满,从右向左缠绕第二层线圈,以最大限度减小误差。
[0097]
(4)零漂误差分析
[0098]
通过原理分析可以知道,测斜仪传感器在绝对理想状态和绝对垂直状态时,是不应该有误差存在的,那么传感器测头所在位置的初始理论值是零,但是在现实情况中,总会有各种各样的误差存在,那么就不会有绝对的理想状态和绝对的垂直状态,仪器自身就会存在一个微等于零但又大于或小于零的数值,对于这种零点漂移误差,可以通过标准两测回和数据处理过程进行消除,最终得出正确的位移值u。
[0099]
传统测斜仪两测回读数分别为u0和u180,由于本系统在两个相互垂直的方向均布置有单轴传感器,因此要测定u0和u90两测回以消除零漂误差。
[0100]
进一步的,通过本发明所述的测量方法和测量系统,与现有常用的人工测量方式对三处深度不同的测斜孔进行对比试验,以验证本发明技术方案的技术效果。
[0101]
根据现场实际情况,设计实际可行的测量数据对比试验方案,人工测量采用正常方式,高精度双轴测斜系统测量方式如表1所示:
[0102][0103]
表1高精度双轴测斜系统现场测量方式
[0104]
(1)测量效率分析
[0105]
①
人工测量
[0106]
人工测量主要步骤分为:仪器检查并连接、下放测斜探头、提升测量(包括u0和u180两阶段)、人工记录、测量完毕。
[0107]
②
本系统自动测量
[0108]
本系统自动测量的主要步骤为:仪器检查并连接、设定测段长度、下放探头、测量(包括u0和u90两阶段)、测量完毕。
[0109]
对比试验结果如表2所示:
[0110][0111]
表2
[0112]
从表中数据可以很直观的看出,应用本系统的自动测量所用时间仅为人工测量的一半左右,由此可以看出,改进后的测斜系统大大节省了人工成本,提高了测量的效率。
[0113]
(2)数据连续性分析
[0114]
本次现场试验共采集537组数据,一轮测量时间为1h17min,理论上平均每日监测组数量应为21.5组/天,但是由于设备更新,实际监测天数为28天,平均每天测量数量为19.2组/天,参照图4所示,数据量变少的原因主要是:
[0115]
①
9月29日起测时间为下午;
[0116]
②
10月16日工地电压过载,数据中断;
[0117]
③
10月18日~10月19日工地停电;
[0118]
④
10月21日下午设备更新。
[0119]
剔除没有正常采集数据的天数,在其余的天数中高精度双轴测斜系统都可以连续稳定的采集数据。
[0120]
(3)数据可靠性分析
[0121]
在实际监测过程中,由于线路连接或者环境影响等因素常会导致某些点位数据丢失,因此要统计每个测点在28天的监测过程中,发生的数据丢失数量和概率,如图5所示。
[0122]
从图5可以看出,数据组总量为537组,平均测点丢包数量为4.1个,平均丢包率为0.77%。由此可见,高精度双轴测斜系统,数据采集连续可靠,数据丢包率低。
[0123]
(4)数据稳定性分析
[0124]
数据稳定性是衡量数据波动性与离散性的指标,数据波动越小,离散程度越小,则稳定性越高。在本课题研究中,选取测斜管顶部数据的方差进行分析,由于从底部起算,误差累积,顶部数据为误差极值。
[0125]
从图6中可以看出:
[0126]
①
在考虑每日因开挖产生真实变形的情况下,数据最大方差为1.03mm。
[0127]
②
如不考虑真实变形,大部分稳定情况下(非开挖),数据方差小于0.5mm。
[0128]
由此可以看出高精度双轴测斜系统采集的数据波动量小,数据稳定性高,此系统应用于实际监测项目是可行、有效的。
[0129]
(5)数据趋势性分析
[0130]
选取p24号测斜监测点进行本发明双轴测斜系统的应用,由于连续测量过程中并无人工数据进行对比,因此取对应人工检测的p32监测点和相邻的p23、p25监测点进行数据
趋势的对比分析。
[0131]
参照图7和图8的测斜曲线对比图可以看出:
[0132]
①
p24最大变形深度约为21m处,p32最大变形深度约为23m处,变形深度和曲线形态基本一致;
[0133]
②
p32由于地面位移的原因,产生了更大的变形趋势。
[0134]
③
p23、p24、p25在时间范围内的变形深度和趋势基本一致
[0135]
④
由于开挖时间和伺服支撑加压时间和力的不同,产生了少许不同的趋势,但总的趋势保持一致。
[0136]
应用高精度双轴测斜系统对围护结构深层水平位移进行测量,可以看出,其与人工测量在变形趋势上保持一致。
[0137]
以上所述,仅为此发明的具体实施方式,但本发明的保护范围不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案和新型的构思加于等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1