集装箱散料装卸装载机用工作装置的制作方法
1.本发明涉及一种工程机械,特别是涉及一种集装箱散料装卸装载机用工作装置。
背景技术:
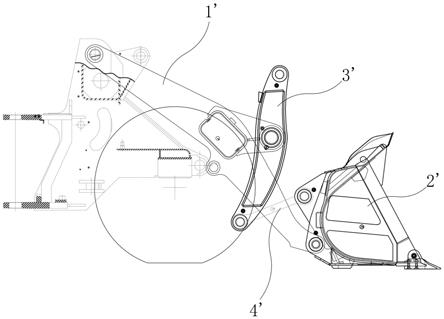
2.如图1所示,轮式装载机的工作装置主要由动臂1’、铲斗2’、摇臂3’、拉杆4’、动臂油缸及转斗油缸等部件组成,作业时动臂1’需要不断地上升及下降,伴随着铲斗2’的收斗及卸斗,以满足装载机铲装物料、短距离运输及卸载物料的要求。动臂1’、动臂油缸及转斗油缸都铰接在前车架上。由于现有装载机工作装置中的动臂1’长度较短,难以完全伸入集装箱内,难以满足市场上标准集装箱的装卸需求,且在集装箱内工作装置机构运动会产生干涉、工作视野较差。
技术实现要素:
3.本发明的目的在于提供一种集装箱散料装卸装载机用工作装置。
4.为实现上述目的,本发明的技术解决方案是:本发明是一种集装箱散料装卸装载机用工作装置,包括连接座、两个动臂油缸、转斗油缸、动臂机构、摇臂、拉杆、铲斗;所述连接座与装载机连接,两个动臂油缸的缸体皆固定在连接座上,两个动臂油缸的活塞杆杆端皆与动臂机构的中部铰接,动臂机构的内端铰接在连接座上,动臂机构的外端与铲斗连接,转斗油缸的缸体固定在连接座上,转斗油缸的活塞杆杆端与摇臂的一端铰接,摇臂的中部铰接在动臂机构上,摇臂另一端与拉杆的内端铰接,拉杆的外端与铲斗的中部铰接;所述动臂机构包括两根动臂、横杆、摇臂杆;所述横杆的两端垂直固定在两根动臂的前部,摇臂杆的两端垂直固定在两根动臂的后部,两根动臂的外端分别铰接在铲斗的两侧,两根动臂的内端分别铰接在连接座上,动臂的中部设有铰接凸块,该铰接凸块与动臂油缸的活塞杆杆端铰接。
5.所述动臂的外侧设有支撑块,该支撑块向上凸起且支撑块顶面为朝向铲斗的斜面。
6.所述动臂的铰接凸块与动臂外端的距离为铰接凸块与动臂内端距离的2-4倍。
7.所述动臂的外侧倾斜向下、向外延伸,即,动臂的铰接凸块与外端之间的部分。
8.采用上述方案后,本发明具有以下优点:1、由于本发明动臂机构包括两根动臂、横杆、摇臂杆;动臂中部与动臂油缸铰接的铰接凸块较为靠近连接座,动臂的长度更长,使得安装在动臂外端上的铲斗可完全伸入集装箱内,满足了标准集装箱的装卸需求,能在集装箱内实现装、卸、铲、推等功能,使集装箱散料装卸的作业效率得到提高。
9.2、由于本发明动臂机构中的横杆与铲斗具有一定距离,避免了动臂机构与拉杆的干涉,工作更加顺利。
10.3、由于本发明动臂的外侧倾斜向下、向外延伸,给操作人员提供了更好的工作视野较。
11.下面结合附图和具体实施例对本发明作进一步的说明。
附图说明
12.图1是传统装载机用工作装置的结构示意图;图2是本发明的轴测图;图3是本发明装物料第一步的示意图;图4是本发明装物料第二步的示意图;图5是本发明装物料第三步的示意图;图6是本发明卸物料第一步的示意图;图7是本发明卸物料第二步的示意图;图8是本发明卸物料第三步的示意图。
具体实施方式
13.如图2所示,本发明是一种集装箱散料装卸装载机用工作装置,包括连接座1、两个动臂油缸2、转斗油缸3、动臂机构4、摇臂5、拉杆6、铲斗7。
14.所述连接座1与装载机连接,两个动臂油缸2的缸体皆固定在连接座1上,两个动臂油缸2的活塞杆杆端皆与动臂机构4的中部铰接,动臂机构4的内端铰接在连接座1上,动臂机构4的外端与铲斗7连接,转斗油缸3的缸体固定在连接座1上,转斗油缸3的活塞杆杆端与摇臂5的一端铰接,摇臂5的中部铰接在动臂机构4的摇臂杆上,摇臂5另一端与拉杆6的内端铰接,拉杆6的外端与铲斗7的中部铰接。
15.所述动臂机构4包括两根动臂41、横杆42、摇臂杆43;所述横杆42的两端垂直固定在两根动臂41的前部,由于两根动臂41长度加长,通过增加横杆42以增加两根动臂41的强度,将横杆42固定在两根动臂41的前部从而给拉杆6让位,摇臂杆43的两端垂直固定在两根动臂41的后部,两根动臂41的外端分别铰接在铲斗7的两侧,两根动臂41的内端分别铰接在连接座1上;所述动臂41的中部设有铰接凸块411,铰接凸块411与动臂油缸2的活塞杆杆端铰接,铰接凸块411与动臂41外端的距离l1为铰接凸块411与动臂41内端距离l2的2-4倍(如图3所示),动臂41的外侧设有支撑块412,该支撑块412向上凸起且支撑块412顶面为朝向铲斗7的斜面413,该支撑块412与动臂41外端的距离小于铲斗7底面的宽度,动臂41的外侧倾斜向下、向外延伸,即,动臂41的铰接凸块411与外端之间的部分。
16.本发明的工作原理:如图3所示,驾驶员操作装载机10对地面的物料进行铲装;如图4所示,抬动臂机构4将铲斗7举到合适的高度,将物料20送入集装箱30内;如图5所示,将物料20运输到合适位置后,操作铲斗7进行卸载物料20;如图6所示,每装车2-4斗物料20后,驱动铲斗7进行推铲堆高作业,将铲斗7抬到合适的位置,驾驶员操作装载机10向前缓慢行驶,对散装物料20进行铲装堆高;如图7所示,驾驶员操作装载机10对装满物料20的集装箱30进行铲装;如图8所示,铲装物料20收斗后,驾驶员操作装载机10后退,直至离开集装箱30,然将物料20卸载到所需的位置处。
17.以上所述,仅为本发明较佳实施例而已,故不能以此限定本发明实施的范围,即依
本发明申请专利范围及说明书内容所作的等效变化与修饰,皆应仍属本发明专利涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1